
Rumah >Peranti teknologi >AI >Satu artikel bercakap tentang cara penderia sistem ADAS harus disusun
Satu artikel bercakap tentang cara penderia sistem ADAS harus disusun

- WBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBke hadapan
- 2023-05-05 10:49:061546semak imbas
Artikel ini mula-mula memperkenalkan kepentingan strategi penempatan penderia dalam sistem bantuan pemanduan lanjutan, dan mencadangkan jenis penderia sistem bantuan pemanduan lanjutan, termasuk kamera pintar yang berpandangan ke hadapan, radar gelombang milimeter yang menghadap ke hadapan dan menghadap sisi (77 GHz/22 GHz ), radar ultrasonik dan kamera pandangan sekeliling, menerangkan secara ringkas ciri prestasi setiap sensor. Kemudian, mengambil penyelesaian pembekal pengeluaran besar-besaran semasa sebagai contoh, parameter prestasi sensor yang berbeza diperkenalkan secara terperinci, termasuk jarak pengesanan, julat pengesanan dan keperluan untuk persekitaran susun atur luaran. Kertas kerja ini memperkenalkan fungsi yang boleh dicapai dengan menggunakan penderia berbeza pada kenderaan sahaja dan strategi gabungan penderia berbeza dengan tahap bantuan pemanduan berbeza dan gabungan fungsi berbeza. Akhir sekali, ia memperkenalkan cara memasang penderia berbeza secara munasabah pada kenderaan Berdasarkan keperluan prestasi yang diperlukan dan lebihan julat pengesanan, pelan pelaksanaan khusus dicadangkan, dan keperluan susun aturnya dianalisis dan dijelaskan secara terperinci.
Singkatan
Dengan kemajuan sains dan teknologi serta perkembangan pesat teknologi pemanduan autonomi, semakin banyak kereta pada masa ini dilengkapi dengan sistem bantuan pemanduan termaju atau sistem pemanduan berbantu diklasifikasikan sebagai pemanduan autonomi tahap lima dalam tahap pemanduan autonomi SAE J3016TM. Pemanduan autonomi menggunakan pelbagai penderia (radar ultrasonik, radar gelombang milimeter, kamera pintar, kamera definisi tinggi/standard, lidar, dsb.). , dan radar gelombang milimeter dalam sistem persepsi pemanduan autonomi. Yuan Xiuzhen menganalisis industri teknologi penderia kenderaan autonomi dan menghuraikan aplikasi perkakasan penting, seperti lidar, kamera, penderiaan ultrasonik, dll. Dalam rantaian nilai pembangunan untuk pemanduan autonomi, pembangunan bahagian sensor tertumpu terutamanya kepada pembekal alat ganti kereta domestik dan asing, manakala penyepaduan fungsi kenderaan diselesaikan oleh OEM.
Zhang Yanyong dan yang lain mencadangkan algoritma gabungan persepsi pemanduan autonomi berdasarkan gabungan pelbagai mod Ramai jurutera cenderung menumpukan usaha pembangunan mereka pada pembangunan algoritma dan reka bentuk sistem, tetapi perkara yang sering berlaku ialah , Strategi perkakasan dan perisian penderia yang berjaya digunakan berfungsi dengan baik pada sesetengah model OEM, tetapi mempunyai kesan purata atau malah negatif pada OEM lain. Ini kerana dalam penyelidikan dan pembangunan pemanduan autonomi, pertimbangan setiap pautan adalah penting. Sebagai pembangunan gelung tertutup, algoritma yang baik adalah berdasarkan pengesanan tepat penderiaan bahagian hadapan penderia Pelbagai jenis penderia perkakasan mempunyai keperluan berbeza untuk prestasi pengesanan penderia Satu perkara penting yang mempengaruhi prestasi pengesanan ialah penempatan dan susunan penderia . Artikel ini memberikan pengenalan ringkas kepada kaedah reka letak berdasarkan ciri prestasi pengesanan penderia yang digunakan dalam pemanduan autonomi.
Pengenalan kepada Penderia Sistem Bantuan Pemanduan Lanjutan
Sistem Bantuan Pemanduan Lanjutan (ADAS) menggunakan penderia untuk mengesan persekitaran sekeliling dalam masa nyata semasa kereta sedang memandu , kumpulkan data, gabungan rasa dan lakukan analisis membuat keputusan ke atas data deria, dan akhirnya mengawal kenderaan dan memberikan amaran awal kepada pemandu.
Kamera boleh memperoleh maklumat persekitaran yang kaya termasuk warna objek, bentuk, bahan, dsb., dan penglihatan komputer 2D telah mencapai banyak kemajuan. Terdapat banyak algoritma lanjutan dalam bidang ini untuk isyarat pengesanan cahaya, pengesanan objek, dsb. Pengelasan dsb. Radar gelombang milimeter boleh mendapatkan maklumat jarak yang tepat, mempunyai keupayaan penembusan yang kuat, boleh menahan pengaruh cuaca dan perubahan persekitaran, dan boleh merealisasikan penderiaan dan pengesanan jarak jauh.
Pada masa ini, terdapat 4 jenis penderia pada kenderaan autonomi yang dihasilkan secara besar-besaran, dan bilangannya ialah 22 (Jadual 1).
Kamera pintar pandangan hadapan: Yang biasa digunakan ialah kamera tunggal, dua dan tiga ia digunakan terutamanya dalam pemandangan jarak sederhana dan jauh Ia boleh mengenal pasti garisan lorong yang jelas, papan tanda lalu lintas. halangan dan pejalan kaki, tetapi tidak sesuai untuk Pencahayaan, cuaca dan keadaan lain adalah sangat sensitif dan memerlukan sokongan algoritma yang kompleks dan keperluan pemproses yang agak tinggi.
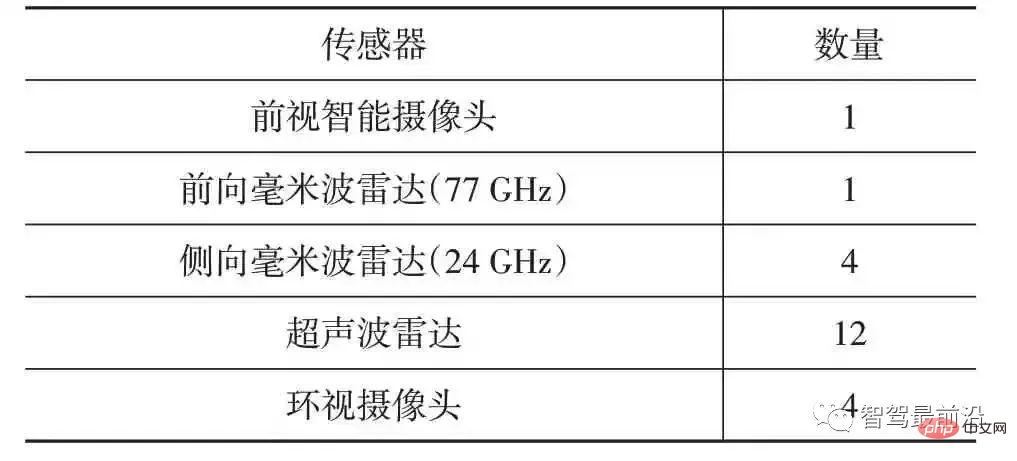
Jadual 1 Klasifikasi penderia sistem bantuan pemandu lanjutan
Radar gelombang milimeter: Terdapat dua jenis utama: radar 24 GHz untuk ukuran jarak pendek dan sederhana dan radar 77 GHz untuk ukuran jarak jauh. Radar gelombang milimeter dengan berkesan boleh mengekstrak maklumat kedalaman medan dan kelajuan, mengenal pasti halangan, dan mempunyai keupayaan tertentu untuk menembusi kabus, asap dan habuk Walau bagaimanapun, dalam kes halangan alam sekitar yang kompleks, kerana gelombang milimeter bergantung pada kedudukan gelombang bunyi, gelombang bunyi. terpantul secara meresap Akibatnya, kadar pengesanan terlepas dan kadar ralat adalah agak tinggi.
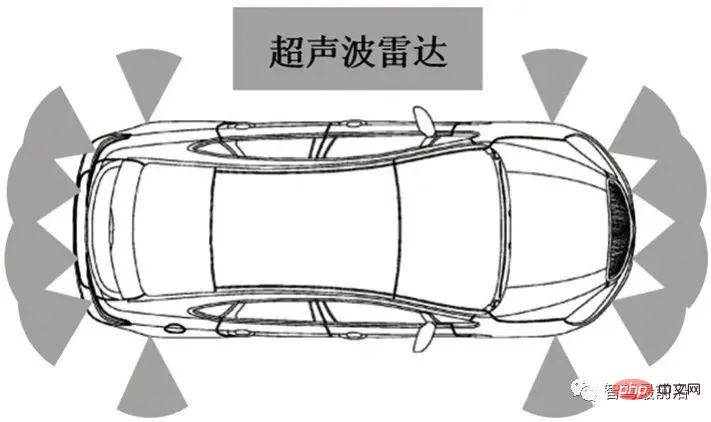
Radar ultrasonik: Ia digunakan terutamanya dalam senario jarak dekat untuk menghantar gelombang ultrasonik dan menerima isyarat ultrasonik yang dipantulkan, dan menghantar hasil pengesanan kepada pengawal. Penggunaan tenaga gelombang ultrasonik adalah perlahan, penembusan adalah kuat, kaedah pengukuran jarak adalah mudah, dan kosnya rendah. Walau bagaimanapun, ia mempunyai had tertentu dalam mengukur jarak pada kelajuan tinggi Apabila kereta bergerak pada kelajuan tinggi, julat ultrasonik tidak dapat mengikuti perubahan masa nyata dalam jarak antara kereta, dan ralatnya adalah besar. Gelombang ultrasonik mempunyai sudut serakan yang besar dan kearah yang lemah Apabila mengukur sasaran yang jauh, isyarat gemanya akan menjadi agak lemah, menjejaskan ketepatan pengukuran. Walau bagaimanapun, dalam pengukuran jarak pendek, penderia julat ultrasonik mempunyai kelebihan yang besar.
Kamera pandangan sekeliling: Terutamanya digunakan dalam pemandangan jarak dekat, ia boleh mengenal pasti halangan, tetapi sangat sensitif kepada keadaan luaran seperti cahaya dan cuaca. Teknologinya adalah matang dan harganya rendah. Dengan pembangunan dan kemajuan teknologi yang berterusan, piksel kamera meningkat secara beransur-ansur, daripada 300,000 piksel awal kepada 1 juta piksel semasa Dalam tempoh tiga tahun akan datang, 2 juta kamera piksel akan menjadi popular.
Penderia merealisasikan gabungan konfigurasi berfungsi
Gabungan penderia berbeza bagi sistem bantuan pemanduan lanjutan boleh mencapai fungsi berbeza 22 penderia yang diperkenalkan di atas semuanya dilengkapi secara keseluruhannya kenderaan boleh merealisasikan ADASL1/L2/L3 Sub-fungsi terperinci diperkenalkan di bawah.
Kamera pintar yang menghadap ke hadapan dan radar gelombang milimeter menghadap ke hadapan
Kamera pintar yang menghadap ke hadapan melaksanakan AEB-C (Automatic Emergency Braking-Car), LDW ( Amaran Berlepas Lorong) ), LKA (bantuan menjaga lorong), TSR (pengiktirafan tanda lalu lintas), untuk mencapai bantuan pemanduan tahap L1. Pengesanan keadaan jalan sebenar adalah tepat (seperti garisan lorong, terowong, tanjakan, had laju, dll.), tetapi pengesanan jarak tidak tepat. Parameter prestasi perwakilannya ditunjukkan dalam Jadual 2.
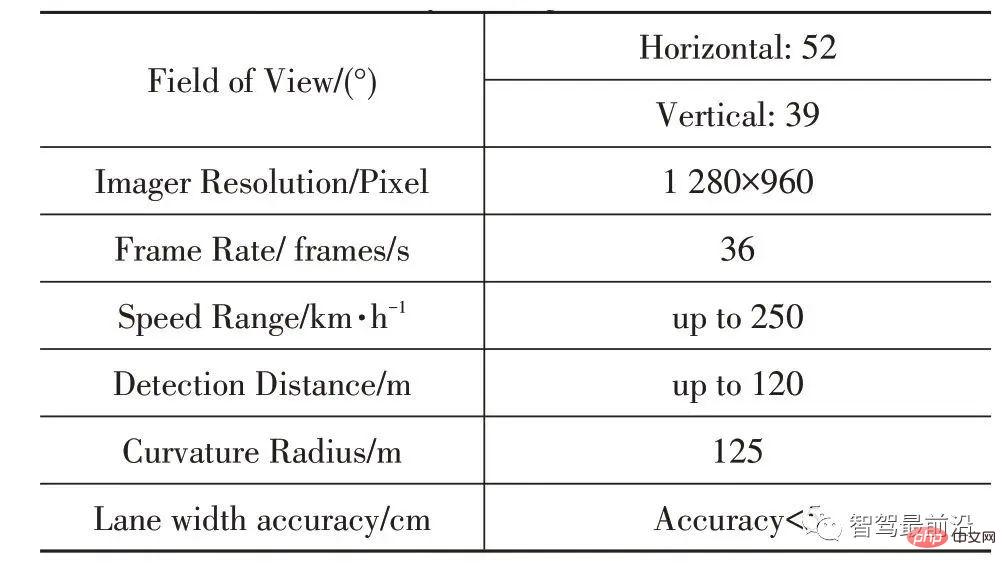
Jadual 2 Beberapa parameter prestasi Mobileye EYEQ3
Gelombang milimeter hadapan Radar (77 GHz) melaksanakan ACC (Adaptive Cruise), AEB-C (Automatic Emergency Braking-Car), FCW (Forward Collision Warning), dan mencapai bantuan pemanduan tahap L1. Pengesanan jarak adalah tepat, tetapi ia tidak dapat meramalkan keadaan sebenar (seperti garisan lorong, terowong, tanjakan, had laju, dsb.). Parameter prestasi perwakilannya ditunjukkan dalam Jadual 3.
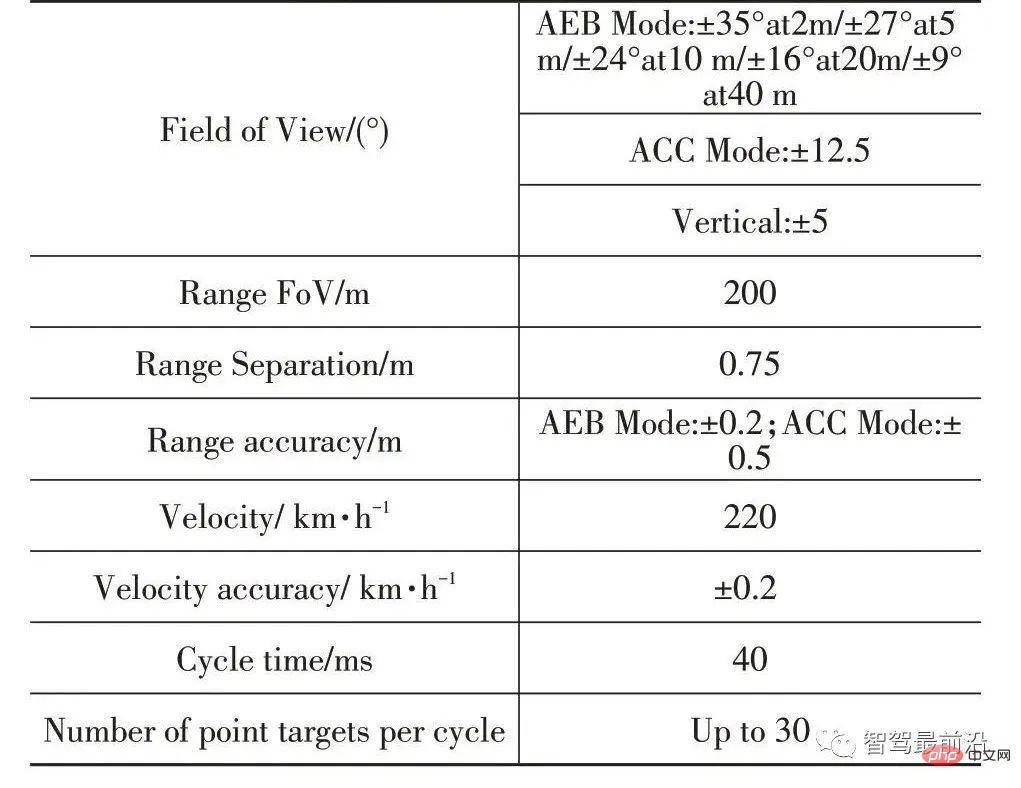
Jadual 3 Beberapa parameter prestasi AC1000
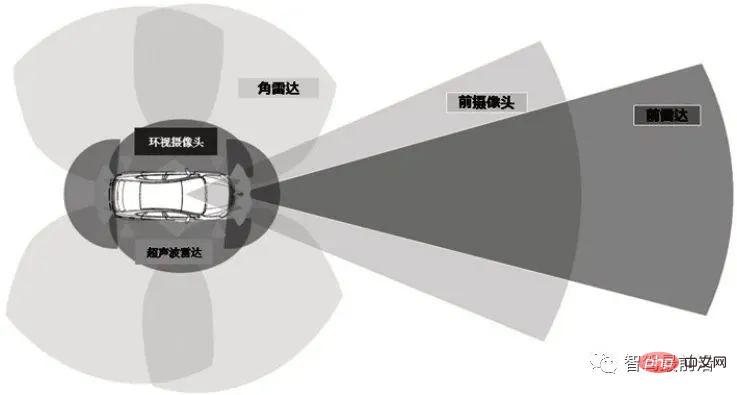
Pintar menghadap ke hadapan kamera dan gabungan radar gelombang milimeter ke hadapan merealisasikan brek kecemasan automatik ACC, AEB-C/P (kenderaan/orang), LDW, LKA, TSR, TJA (bantuan kesesakan lalu lintas), ICA (bantuan pelayaran pintar), dan boleh mencapai pemanduan tahap L2 Bantu (Rajah 1). Maklumat jarak dan jalan adalah semua data bercantum, dan pengesanan adalah tepat. Perbandingan radar tunggal, kamera tunggal dan penyelesaian gabungan ditunjukkan dalam Jadual 4.
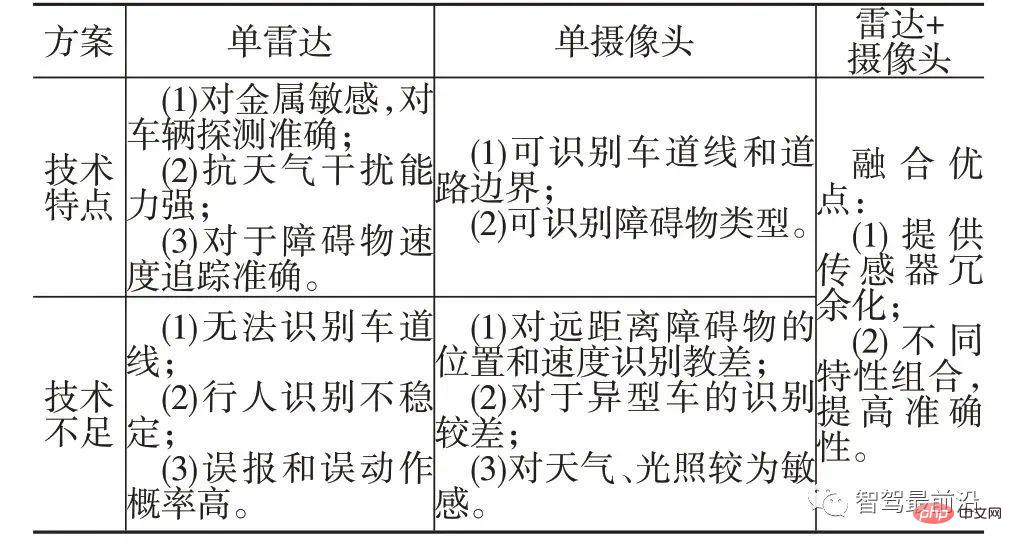
Jadual 4 Perbandingan radar tunggal, kamera tunggal dan penyelesaian gabungan
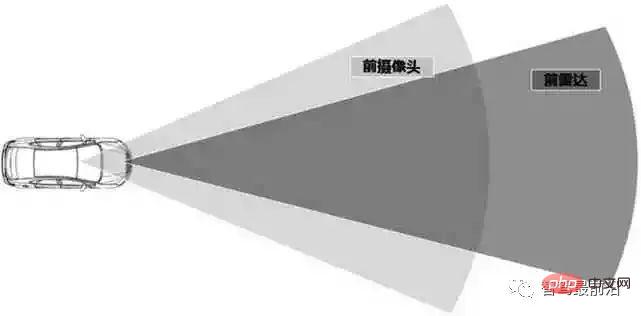
Rajah 1 Gabungan kamera pintar menghadap ke hadapan dan radar gelombang milimeter menghadap ke hadapan
Radar gelombang milimeter (radar sudut) menghadap sisi
Radar gelombang milimeter menghadap sisi (24 GHz) melaksanakan fungsi pemantauan zon buta, dan terdapat 2 kaedah pelaksanaan. Radar gelombang 2 milimeter di bahagian belakang, merealisasikan fungsi BSD (pemantauan titik buta), LCW (amaran perlanggaran pertukaran lorong), RCTA (amaran lintasan lalu lintas belakang) dan DOW (amaran pembukaan pintu) pada bahagian belakang + 2 di bahagian hadapan Radar gelombang milimeter, di samping merealisasikan fungsi di atas, juga boleh merealisasikan FCTA (amaran lalu lintas ke hadapan) dan menyokong fungsi bantuan pemanduan lanjutan di atas paras L2. Dengan kemajuan sains dan teknologi, prestasi radar gelombang milimeter sisi juga bertambah baik secara beransur-ansur, lihat Jadual 5.

Jadual 5 Parameter separa dan pembangunan radar gelombang milimeter sisi
Gabungan radar gelombang milimeter menghadap sisi (4 keping), radar gelombang milimeter menghadap ke hadapan (1 keping), dan kamera pintar menghadap ke hadapan (1 keping) boleh mencapai pemanduan autonomi tahap L2+ (atau L3-). Dalam pemanduan autonomi tahap L2, TJA/HWAML (Bantuan Pemanduan Lebuhraya - Berbilang lorong), ALC (Bantuan Perubahan Lorong Aktif), TLC (Bantuan Perubahan Lorong Tercetus), ELK (Penyimpan Lorong Kecemasan) dan ESA (Bantuan Pemandu Kecemasan) adalah ditambah ), JA (bantuan persimpangan), amaran menyeluruh (termasuk BSD/DOW/RCTA/FCTA/LCW) (Rajah 2). Ia boleh merealisasikan fungsi pemanduan automatik di bawah keadaan lebuh raya.
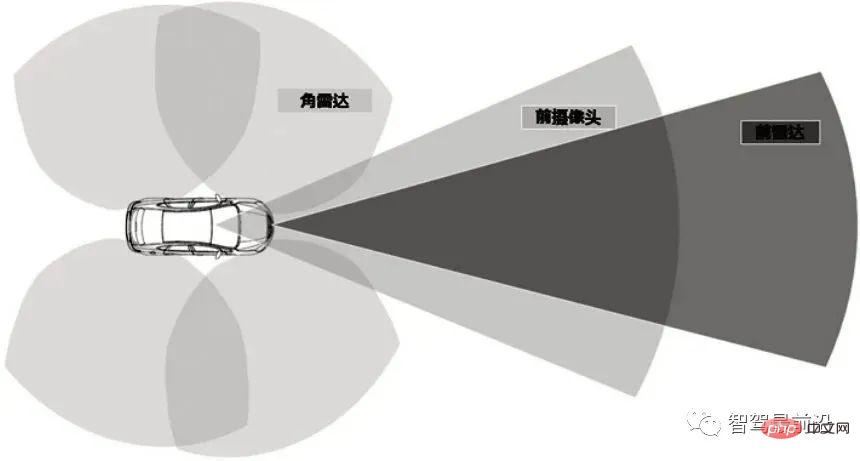
Rajah 2 Kamera hadapan, radar gelombang milimeter hadapan, gabungan radar sudut
Ultrasonik radar
Mengikut ciri-ciri pengesanan jarak dekat radar ultrasonik sasaran (Jadual 6), radar ultrasonik boleh merealisasikan PDC (radar undur), APA (bantuan letak kenderaan automatik) dan BSD (Pengesanan Titik Buta). ) fungsi. Empat radar ultrasonik dipasang pada bampar belakang untuk merealisasikan fungsi PDC Sesetengah kenderaan mempunyai empat radar ultrasonik dipasang pada bampar hadapan pada masa yang sama (sejumlah 8 radar ultrasonik di hadapan dan belakang) untuk mengesan halangan di hadapan apabila mengundur. Empat radar ultrasonik dipasang pada sisi bampar hadapan dan belakang untuk merealisasikan fungsi pemantauan titik buta jarak dekat Pada masa yang sama, digabungkan dengan 8 radar ultrasonik di bahagian hadapan dan belakang, sejumlah 12 radar ultrasonik dapat merealisasikan. Fungsi APA. Jika radar sudut gelombang milimeter dipasang pada sisi kenderaan untuk melaksanakan fungsi BSD, tidak perlu memasang radar ultrasonik di bahagian tepi. Sebab utama BSD memasang radar ultrasonik adalah kelebihan kosnya. Gabungan dan fungsi berbeza radar ultrasonik ditunjukkan dalam Rajah 3.
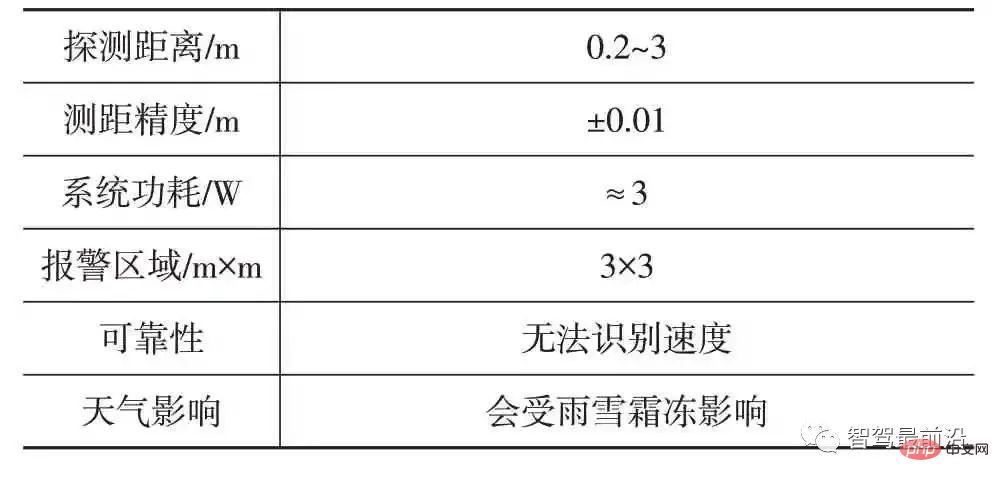
Jadual 6 Beberapa parameter dan ciri radar ultrasonik
Rajah 3 Susun atur penyelesaian radar ultrasonik
Kamera pandangan sekeliling
AVM (sistem pengimejan pengawasan panoramik) melalui 4 depan, belakang, kiri dan kanan Penderia imej (kamera pandangan sekeliling) mengumpul data persekitaran sekeliling kenderaan dan menghantar imej kepada pengawal imej panorama melalui CVBS (definisi standard)/LVDS (definisi tinggi). Jika hanya satu kamera dipasang di bahagian belakang, fungsi imej undur boleh direalisasikan. Jika empat kamera dipasang pada bahagian hadapan, belakang, kiri dan kanan pada masa yang sama, pembetulan herotan dan pemangkasan imej input daripada empat kamera akan dilakukan untuk mencapai penyepaduan empat pandangan dan kesan paparan atas 2D, penyepaduan 3D kesan putaran (penyelesaian HD), dan akhirnya dipaparkan melalui MP5. Beberapa parameter penting kamera pandangan sekeliling ditunjukkan dalam Jadual 7, dan susun aturnya ditunjukkan dalam Rajah 4 bagi keseluruhan kenderaan.
Gabungan susun atur kenderaan sensor
Susun atur gabungan antara penderia berbeza sistem bantuan pemanduan lanjutan perlu mengambil kira liputan dan redundansi. Julat penderiaan bagi penderia yang berbeza mempunyai kelebihan dan batasannya sendiri Arah aliran pembangunan semasa ialah menggunakan teknologi gabungan maklumat penderia untuk mengimbangi kekurangan penderia tunggal dan meningkatkan keselamatan dan kebolehpercayaan keseluruhan sistem pemanduan pintar. Liputan: 360° badan kenderaan perlu dilindungi Bergantung pada kepentingan, jarak pengesanan di hadapan lebih panjang (120 m), jarak pengesanan di belakang lebih pendek sedikit (80 m), dan jarak pengesanan pada. sisi kiri dan kanan adalah yang terpendek (20 m). Untuk memastikan keselamatan, setiap kawasan perlu dilindungi oleh 2 atau lebih penderia untuk pengesahan bersama Rajah 5 menunjukkan pelan susun atur.
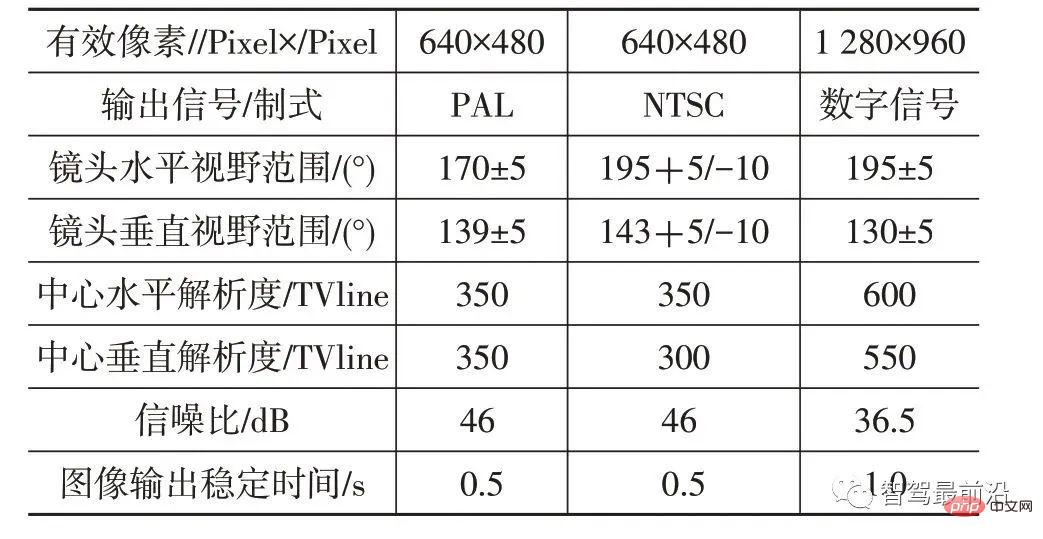
Jadual 7 Beberapa parameter kamera pandangan sekeliling
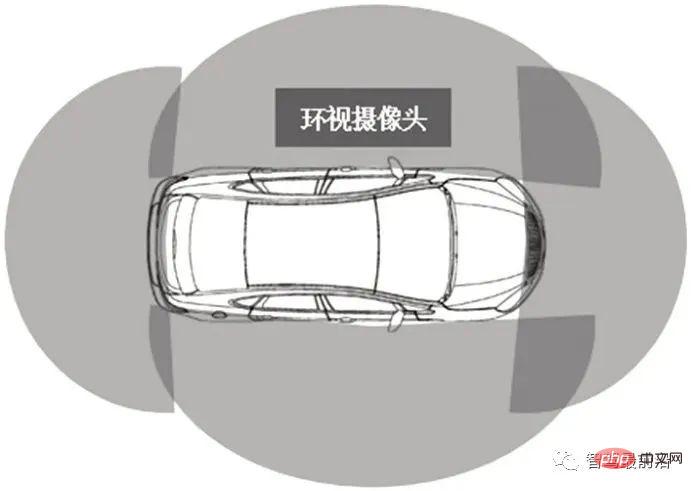
Rajah 4 Susun atur penyelesaian kamera pandangan sekeliling
Rajah 5 Gambarajah gabungan reka letak sensor
Integrasi kamera pintar menghadap ke hadapan dan susun atur radar gelombang milimeter menghadap ke hadapan
Kedudukan pemasangan radar hadapan ditetapkan mengikut keperluan parameter prestasi radar dan bentuk badan, dan kedudukan susun atur yang munasabah ditetapkan. Ketinggian radar di atas tanah (jarak dari paksi antena radar ke tanah) disyorkan supaya 50 cm, dan apa-apa antara 30 cm dan 120 cm boleh diterima. Ketinggian hampir 30 cm di atas tanah mungkin mempunyai isyarat pemantulan tanah yang berlebihan yang mengganggu penerimaan isyarat langsung dan mengurangkan risiko pengesanan. Jarak antara radar dan penutup pelindung adalah lebih besar daripada 15 mm (2 kali ganda panjang gelombang, yang boleh mengelakkan pengaruh medan berdekatan kompleks pada radar radar) dan kurang daripada 40 mm (untuk mengelakkan permukaan persilangan gelombang radar yang terlalu besar. ). Koordinat kedudukan sisi radar adalah antara -30 cm dan 30 cm. Jika radar dipasang dengan penutup hadapan, ia juga mempunyai keperluan khas untuk penutup, seperti jejari kelengkungan > 600 mm, ketebalan seragam di persimpangan antara rasuk dan penutup, profil yang perlu menjalani ujian simulasi , bahan yang perlu diuji untuk sifat elektrik, dan bahagian yang tidak disembur, dsb. Jarak antara pancaran radar gelombang milimeter dan struktur sekeliling ialah >5 mm, sudut dengan kenderaan - sudut pic, sudut yaw dan sudut gulung ialah 0° Jarak antara FOV radar dan rangka plat lesen adalah lebih daripada 15 mm, untuk mengelakkan menjejaskan pengesanan radar selepas memasang plat lesen, dsb. Seperti yang ditunjukkan dalam Rajah 6.
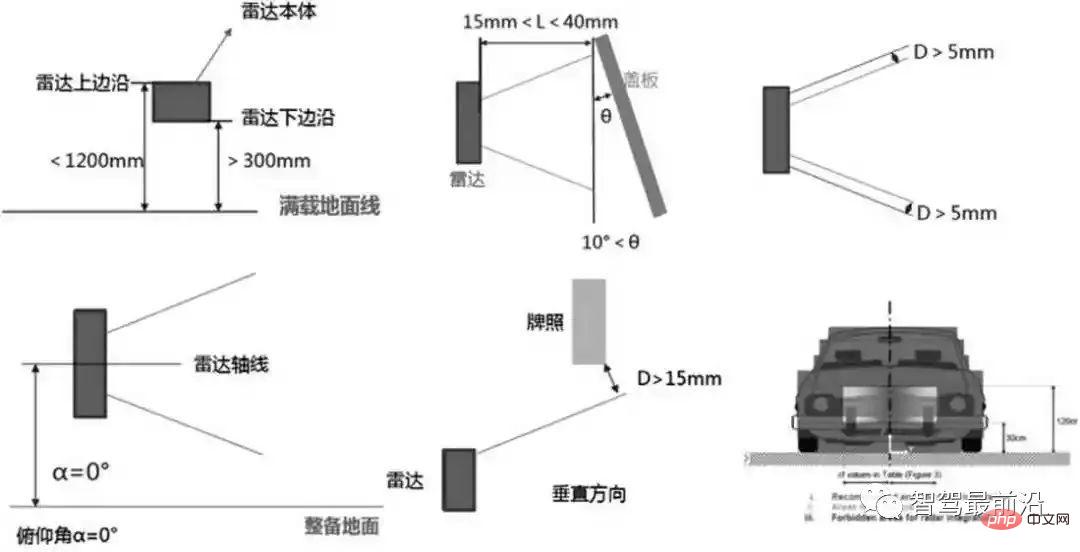
Rajah 6 Gambar rajah susun atur radar gelombang milimeter hadapan
Kamera hadapan kedudukan pemasangan menegak terbaik adalah di tengah cermin depan, dengan ketinggian lebih daripada 1,200 mm. Sudut yaw, sudut guling dan sudut pic adalah sebaik-baiknya berhampiran 0° (±3°). Pendakap hendaklah dipasang di kawasan kaca yang bersih, dan kawasan tontonan tidak boleh disekat oleh skrin sutera atau percetakan. Jarak antara tingkap kamera dan garisan pengelap pengelap hendaklah lebih daripada 30 mm, dan jurang antara modul kanta dan cermin depan hendaklah sekurang-kurangnya 1 mm. Bukaan hendaklah ditentukan oleh sudut pandangan yang diunjurkan pada setiap lapisan cermin depan Lubang pengudaraan (kawasan bukaan lebih daripada 120 mm2) hendaklah direka pada pendakap dan penutup kamera untuk memastikan peredaran udara. Toleransi kedudukan pendakap apabila dipasang pada cermin depan biasanya ±1 mm (kedudukan) dan ±2.5° (putaran) (Rajah 7).
Reka letak dan cantuman radar gelombang milimeter sisi (radar sudut)
Radar sudut ditetapkan mengikut keperluan parameter prestasi dan bentuk badannya. Untuk lokasi susun atur, badan kereta perlu menyediakan ruang untuk susun atur. Keperluan untuk ketinggian susunan radar sudut: Jika ia terlalu rendah, lumpur, air dan kotoran akan menjejaskan radar; jika ia terlalu tinggi, kawasan buta yang berhampiran dengan kenderaan akan menjadi lebih besar (yang mungkin menyebabkan tiada medan pandangan melebihi ±20°). Ketinggian yang disyorkan ialah antara 400 mm dan 1,000 mm. Untuk meminimumkan kawasan buta, sudut antara radar dan paksi membujur kenderaan hendaklah antara 30° dan 45°, dan sudut antara radar dan satah mendatar kenderaan paling baik dikawal pada 90°. Tiada logam, rabung, struktur berbilang lapisan atau bahan dalam medan pandangan FOV radar Sudut maksimum antara FOV dan penutup ialah 70° Penutup mestilah rata dan kelengkungan mestilah lebih daripada 350 mm.
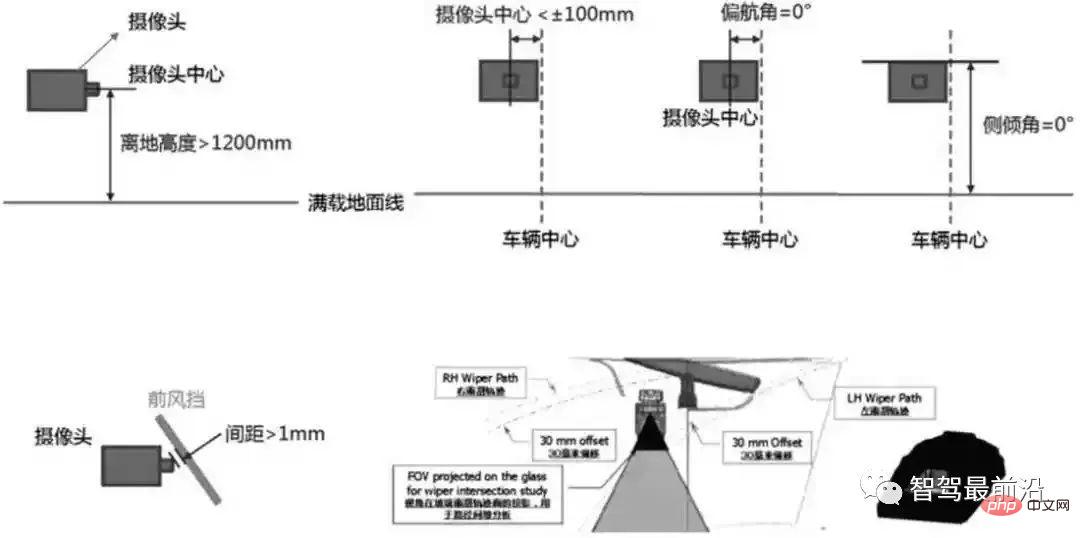
Rajah 7 Gambarajah susun atur kamera hadapan
Gaburan susun atur radar ultrasonik
Untuk merealisasikan fungsi APA, 12 radar ultrasonik mesti dipasang pada keseluruhan kenderaan, dan bilangan susun atur adalah agak besar. Penderia radar ultrasonik dipasang pada pendakap pelekap dan diperbaiki dengan mengikat dengan kulit bampar. Untuk memenuhi keperluan pengesanan sepenuhnya, lokasi susun atur radar ultrasonik menyediakan keperluan khusus, lihat Rajah 8. Keperluan khusus untuk susun atur termasuk: elakkan meletakkan radar pada permukaan bampar kereta, elakkan mengambil gambar yang mengganggu kawasan pengesanan radar, jauhkan daripada paip ekzos sumber haba, lampu berkuasa tinggi, dsb.
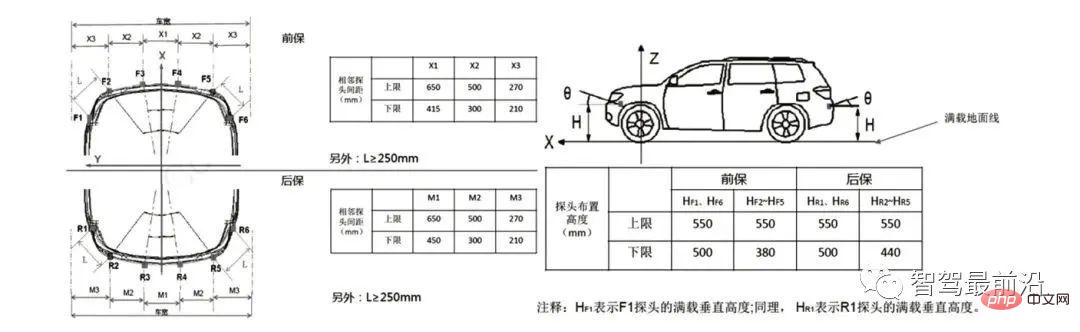
Rajah 8 Keperluan lokasi susun atur radar ultrasonik
Kamera pandangan sekeliling
Sistem pandangan sekeliling AVM memerlukan sejumlah 4 kamera yang disusun di hadapan, belakang, kiri dan kanan badan kereta. Kamera hadapan dipasang di kawasan berhampiran gril hadapan. Kamera belakang dipasang pada atau berhampiran lampu plat lesen pintu belakang. Kamera kiri dan kanan perlu dipasang di bahagian bawah perumah cermin spion, dan lubang kamera perlu dikhaskan pada cermin spion kiri dan kanan untuk memudahkan pemasangan kamera kiri dan kanan. Penentukuran optik harus dilakukan apabila kamera disusun untuk memastikan bahawa imej kamera bersebelahan mempunyai pertindihan yang mencukupi, dan penyambungan imej harus dapat memastikan bahawa tiada tepi hitam dalam ralat pemasangan 1° kamera, dan kawasan buta tidak boleh melebihi keperluan piawaian korporat. Untuk mengelakkan imej panorama daripada disambung kerana perubahan dalam imej yang ditangkap, kamera harus mempunyai struktur penentududukan anti-putaran.
Keperluan susun atur kamera depan dan belakang: Apabila kenderaan dimuatkan sepenuhnya, ketinggian di atas tanah ialah ≥ 600 mm jarak dari satah tengah ialah ≤ 50 mm, adalah disyorkan untuk meletakkannya pada satah tengah; paksi visual adalah selari dengan satah XZ kenderaan paksi optik dan garisan tanah adalah 1 000 hingga 2 000 mm dari bahagian paling luar badan kenderaan ≤ 200 mm medan pandangan menegak kamera boleh dilihat sepenuhnya pada 3 000 mm An; objek 3 000 mm tinggi berdiri tegak di atas tanah. Rajah 9 menunjukkan keperluan susun atur untuk kamera pandangan sekeliling (depan).
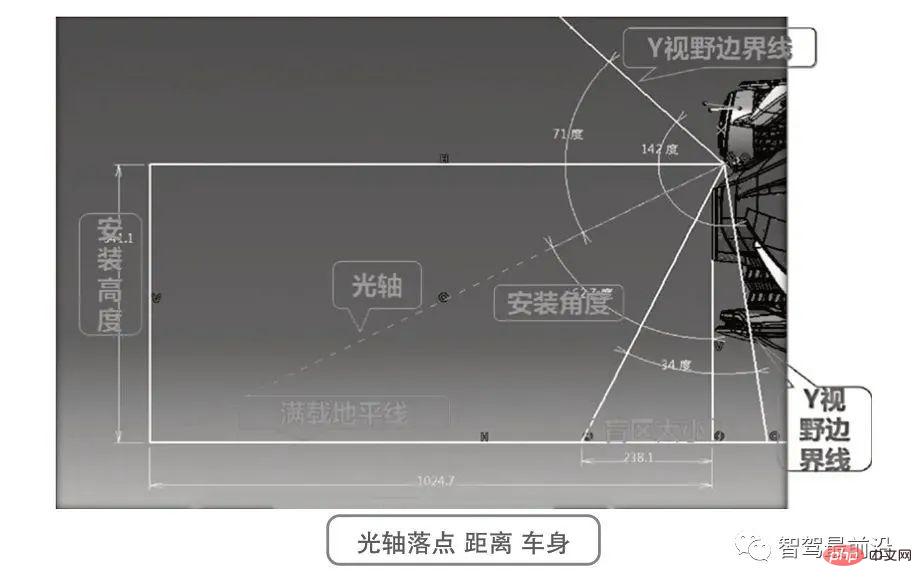
Rajah 9 Keperluan susun atur kamera pandangan sekeliling (depan)
Kiri dan kamera kanan (Pada cermin pandang belakang) Keperluan penyusunan: pandangan hadapan kamera, sudut antara sudut pandangan dan garis menegak disyorkan untuk 20 hingga 25° sudut antara sudut pandangan dan garis menegak; disyorkan untuk 1.5 hingga 5° ketinggian pemasangan adalah lebih daripada 900 mm jarak terkeluar dari badan kenderaan Lebih daripada 100 mm bidang pandangan mesti meliputi 10 m di hadapan dan belakang kenderaan, dan jarak antara medan pandangan 10 m dan pinggir bawah perumahan cermin belakang adalah lebih besar daripada 1 mm, dan sudut antara medan pandangan hadapan dan belakang 5 m dan paksi optik adalah kurang daripada 85° Dan jarak minimum antara Bidang pandangan 5 m dan tepi bawah perumah cermin spion lebih besar daripada 1.2 mm, protrusi kamera kurang daripada 5 mm (boleh laras).
Selain memastikan lebihan liputan julat pengesanan, penderia sistem bantuan pemanduan lanjutan juga mesti memenuhi syarat pemasangan setiap sensor dan kenderaan semasa pemasangan sebenar. Parameter susun atur penderia yang diperkenalkan dalam artikel ini diringkaskan dan digabungkan berdasarkan model kereta tertentu dan produk penderia daripada pembekal tertentu. Pembekal sensor yang berbeza akan mempunyai keperluan susun atur yang sedikit berbeza Semasa proses susun atur model kenderaan sebenar, pelarasan penyesuaian mesti dibuat berdasarkan keperluan susun atur yang disediakan oleh pembekal, serta susun atur dan bentuk kenderaan.
Atas ialah kandungan terperinci Satu artikel bercakap tentang cara penderia sistem ADAS harus disusun. Untuk maklumat lanjut, sila ikut artikel berkaitan lain di laman web China PHP!
Artikel berkaitan
Lihat lagi- Aliran teknologi untuk ditonton pada tahun 2023
- Cara Kecerdasan Buatan Membawa Kerja Baharu Setiap Hari kepada Pasukan Pusat Data
- Bolehkah kecerdasan buatan atau automasi menyelesaikan masalah kecekapan tenaga yang rendah dalam bangunan?
- Pengasas bersama OpenAI ditemu bual oleh Huang Renxun: Keupayaan penaakulan GPT-4 belum mencapai jangkaan
- Bing Microsoft mengatasi Google dalam trafik carian terima kasih kepada teknologi OpenAI