
Rumah >Peranti teknologi >AI >Sejauh mana teknologi pembelajaran mendalam menyelesaikan masalah robot yang mengendalikan objek boleh ubah bentuk
Sejauh mana teknologi pembelajaran mendalam menyelesaikan masalah robot yang mengendalikan objek boleh ubah bentuk

- 王林ke hadapan
- 2023-04-12 09:25:05920semak imbas
Penterjemah |. Li Rui
Penilai |. Orang secara semula jadi belajar membentuknya, melipatnya dan memanipulasinya dengan cara yang berbeza dan masih dapat mengenalinya.
 Tetapi untuk sistem robotik dan kecerdasan buatan, memanipulasi objek boleh ubah bentuk adalah satu cabaran yang besar. Sebagai contoh, robot mesti mengambil beberapa langkah untuk membentuk doh menjadi kerak pizza. Apabila doh berubah bentuk, ia mesti direkodkan dan dijejaki, dan pada masa yang sama ia mesti memilih alat yang sesuai untuk setiap langkah kerja. Ini adalah tugas yang mencabar untuk sistem kecerdasan buatan semasa, yang lebih stabil apabila menangani objek tegar dengan keadaan yang lebih boleh diramal.
Tetapi untuk sistem robotik dan kecerdasan buatan, memanipulasi objek boleh ubah bentuk adalah satu cabaran yang besar. Sebagai contoh, robot mesti mengambil beberapa langkah untuk membentuk doh menjadi kerak pizza. Apabila doh berubah bentuk, ia mesti direkodkan dan dijejaki, dan pada masa yang sama ia mesti memilih alat yang sesuai untuk setiap langkah kerja. Ini adalah tugas yang mencabar untuk sistem kecerdasan buatan semasa, yang lebih stabil apabila menangani objek tegar dengan keadaan yang lebih boleh diramal.
Kini, teknik pembelajaran mendalam baharu yang dibangunkan oleh penyelidik di MIT, Carnegie Mellon University, dan UC San Diego berjanji untuk menjadikan sistem robotik lebih stabil apabila mengendalikan objek boleh ubah bentuk. Teknologi yang dipanggil DiffSkill, menggunakan rangkaian saraf dalam untuk mempelajari kemahiran mudah dan modul perancangan untuk menggabungkan kemahiran tersebut untuk menyelesaikan tugasan yang memerlukan pelbagai langkah dan alatan.
Memproses objek boleh ubah bentuk melalui pembelajaran tetulang dan pembelajaran mendalam
Jika sistem AI ingin memproses objek, ia mesti dapat mengesan dan mentakrifkan keadaannya serta meramalkan rupa ia dalam masa hadapan. Untuk objek tegar ini adalah masalah yang banyak diselesaikan. Dengan set contoh latihan yang baik, rangkaian saraf yang mendalam akan dapat mengesan objek tegar dari sudut yang berbeza. Apabila objek boleh ubah bentuk terlibat, ruang keadaan berbilang mereka menjadi lebih kompleks.
Lin Xingyu, pelajar kedoktoran di Carnegie Mellon University dan pengarang utama kertas DiffSkill, berkata, "Untuk objek tegar, kita boleh menggunakan enam nombor untuk menerangkan keadaannya: tiga nombor mewakili koordinat XYZnya, dan Tiga nombor lain mewakili orientasinya Walau bagaimanapun, objek boleh ubah bentuk seperti doh atau fabrik mempunyai darjah kebebasan yang tidak terhingga, menjadikannya lebih sukar untuk menggambarkan keadaannya dengan tepat berbanding dengan objek tegar Cara mereka berubah bentuk juga lebih sukar untuk dimodelkan secara matematik.
Pembangunan simulator fizik yang boleh dibezakan telah membolehkan aplikasi kaedah berasaskan kecerunan untuk menyelesaikan tugasan manipulasi objek boleh ubah bentuk. Ini berbeza daripada kaedah pembelajaran pengukuhan tradisional, yang cuba mempelajari dinamik persekitaran dan objek melalui interaksi cuba-ralat tulen.
DiffSkill diilhamkan oleh PlasticineLab, simulator fizik yang boleh dibezakan dan dibentangkan pada persidangan ICLR 2021. PlasticineLab menunjukkan bahawa simulator boleh dibezakan boleh membantu dengan tugas jangka pendek.
PlasticineLab ialah simulator objek boleh ubah bentuk berdasarkan fizik boleh dibezakan. Ia berfungsi dengan baik untuk melatih model berasaskan kecerunan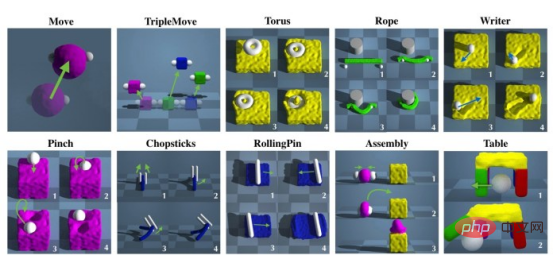 tetapi simulator boleh dibezakan masih menangani masalah jangka panjang yang memerlukan berbilang langkah dan menggunakan alatan yang berbeza. Sistem kecerdasan buatan berdasarkan simulator boleh dibezakan juga memerlukan pengetahuan tentang keadaan simulasi lengkap dan parameter fizikal persekitaran yang berkaitan. Ini mengehadkan terutamanya untuk aplikasi dunia sebenar, di mana ejen biasanya melihat dunia melalui data visual dan depth-sensing (RGB-D).
tetapi simulator boleh dibezakan masih menangani masalah jangka panjang yang memerlukan berbilang langkah dan menggunakan alatan yang berbeza. Sistem kecerdasan buatan berdasarkan simulator boleh dibezakan juga memerlukan pengetahuan tentang keadaan simulasi lengkap dan parameter fizikal persekitaran yang berkaitan. Ini mengehadkan terutamanya untuk aplikasi dunia sebenar, di mana ejen biasanya melihat dunia melalui data visual dan depth-sensing (RGB-D).
Lin Xingyu berkata, "Kami mula bertanya sama ada kami boleh mengeluarkan langkah-langkah yang diperlukan untuk menyelesaikan tugasan kepada kemahiran, dan mempelajari konsep abstrak tentang kemahiran supaya kami boleh menghubungkannya untuk menyelesaikan tugasan yang lebih kompleks."
DiffSkill ialah rangka kerja di mana ejen kecerdasan buatan mempelajari abstraksi kemahiran menggunakan model fizikal yang boleh dibezakan dan menggabungkannya untuk menyelesaikan tugas operasi yang kompleks. Karya lepasnya telah memfokuskan pada penggunaan pembelajaran tetulang untuk memanipulasi objek boleh ubah bentuk seperti kain, tali dan cecair. Untuk DiffSkill, dia memilih manipulasi doh kerana cabaran yang dikemukakannya. Beliau berkata, "Manipulasi doh amat menarik kerana ia tidak mudah dicapai dengan pencengkam robot, tetapi memerlukan penggunaan alat yang berbeza mengikut turutan, iaitu sesuatu yang manusia mahir tetapi robot kurang biasa digunakan." 🎜 >Selepas latihan, DiffSkill boleh berjaya menyelesaikan satu set tugasan manipulasi doh menggunakan input RGB-D sahaja.
Menggunakan rangkaian saraf untuk mempelajari kemahiran abstrak
Kebolehlaksanaan rangkaian neural latihan DiffSkill untuk meramalkan keadaan sasaran daripada keadaan awal dan parameter yang diperoleh daripada simulator fizik boleh dibezakanDiffSkill terdiri daripada dua komponen utama: "abstrak kemahiran saraf" yang menggunakan rangkaian saraf untuk mempelajari kemahiran individu dan "perancang" untuk menyelesaikan tugasan jangka panjang.DiffSkill menggunakan simulator fizik yang boleh dibezakan untuk menjana contoh latihan untuk abstraktor kemahiran. Contoh ini menunjukkan cara menggunakan alat tunggal untuk mencapai matlamat jangka pendek, seperti menggunakan pin penggelek untuk menyebarkan doh atau spatula untuk menggerakkan doh.
Contoh ini dibentangkan kepada abstraktor mahir dalam bentuk video RGB-D. Memandangkan pemerhatian imej, pengabstraksi kemahiran mesti meramalkan sama ada matlamat yang diingini boleh dilaksanakan. Model mempelajari dan melaraskan parameternya dengan membandingkan ramalannya dengan keputusan sebenar daripada simulator fizik.
Manipulasi robot objek boleh ubah bentuk seperti doh memerlukan penaakulan jangka panjang tentang penggunaan alat yang berbeza. Pendekatan DiffSkill memanfaatkan simulator yang boleh dibezakan untuk mempelajari dan menggabungkan kemahiran untuk tugas yang mencabar ini.
Sementara itu, DiffSkill melatih pengekod auto variasi (VAE) untuk mempelajari perwakilan ruang terpendam bagi contoh yang dijana oleh simulator fizik. Pengekod auto variasi (VAE) mengekalkan ciri penting dan membuang maklumat yang tidak berkaitan tugas. Dengan menukar ruang imej berdimensi tinggi kepada ruang terpendam, pengekod auto variasi (VAE) memainkan peranan penting dalam membolehkan DiffSkill merancang bidang pandangan yang lebih panjang dan meramalkan hasil daripada pemerhatian data deria.
Salah satu cabaran penting dalam melatih pengekod auto variasi (VAE) ialah memastikan ia mempelajari ciri yang betul dan membuat generalisasi kepada dunia sebenar. Dalam dunia nyata, komposisi data visual adalah berbeza daripada data yang dijana oleh simulator fizikal. Sebagai contoh, warna penggelek atau papan pemotong tidak relevan dengan tugas, tetapi kedudukan dan sudut penggelek serta kedudukan doh adalah.
Pada masa ini, penyelidik menggunakan teknik yang dipanggil "rawak domain," yang merawak sifat persekitaran latihan yang tidak berkaitan, seperti latar belakang dan pencahayaan, dan mengekalkan perkara seperti kedudukan dan orientasi ciri penting. Ini menjadikan pengekod auto variasi latihan (VAE) lebih stabil apabila digunakan pada dunia sebenar.
Lin Xingyu berkata, "Bukan mudah untuk melakukan ini kerana kita perlu merangkumi semua kemungkinan perbezaan antara simulasi dan dunia sebenar (dipanggil sim2real gap). Cara yang lebih baik ialah menggunakan awan titik 3D sebagai perwakilan pemandangan. , yang memudahkan pemindahan daripada simulasi ke dunia nyata Malah, kami sedang membangunkan projek susulan menggunakan awan titik sebagai input ”
Tugas jangka panjang merancang objek boleh ubah bentuk
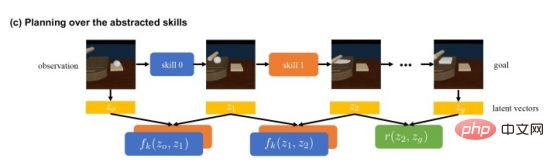
Perancang DiffSkill boleh meramalkan langkah perantaraan dengan sangat tepat 
Lin Xingyu berkata, “Salah satu perkara utama ialah satu set kemahiran boleh memberikan abstraksi temporal yang sangat penting yang membolehkan kita membuat penaakulan dalam jangka masa panjang Ini juga serupa dengan cara manusia menangani tugas yang berbeza: berfikir dalam abstraksi temporal yang berbeza, dan Ia bukan tentang memikirkan perkara yang perlu dilakukan seterusnya ”
Walau bagaimanapun, kapasiti DiffSkill juga terhad. Sebagai contoh, prestasi DiffSkill menurun dengan ketara apabila melaksanakan salah satu tugas yang memerlukan perancangan tiga peringkat (walaupun ia masih mengatasi teknik lain). Lin Xingyu juga menyebut bahawa dalam beberapa kes, peramal kebolehlaksanaan boleh menghasilkan positif palsu. Para penyelidik percaya bahawa mempelajari ruang terpendam yang lebih baik boleh membantu menyelesaikan masalah ini.
Para penyelidik juga meneroka arah lain untuk meningkatkan DiffSkill, termasuk algoritma perancangan yang lebih cekap yang boleh digunakan untuk tugasan yang lebih panjang.
Lin Xingyu menyatakan harapan bahawa suatu hari nanti, dia boleh menggunakan DiffSkill pada robot sebenar membuat pizza. Beliau berkata, "Kami masih jauh dari itu. Pelbagai cabaran telah timbul dari segi kawalan, pemindahan sim2real dan keselamatan. Tetapi kami kini lebih yakin untuk cuba melancarkan beberapa misi jangka panjang." > Tajuk teks asal:
Teknik pembelajaran mendalam ini menyelesaikan salah satu cabaran sukar robotik, Pengarang: Ben Dickson
Atas ialah kandungan terperinci Sejauh mana teknologi pembelajaran mendalam menyelesaikan masalah robot yang mengendalikan objek boleh ubah bentuk. Untuk maklumat lanjut, sila ikut artikel berkaitan lain di laman web China PHP!
Artikel berkaitan
Lihat lagi- Aliran teknologi untuk ditonton pada tahun 2023
- Cara Kecerdasan Buatan Membawa Kerja Baharu Setiap Hari kepada Pasukan Pusat Data
- Bolehkah kecerdasan buatan atau automasi menyelesaikan masalah kecekapan tenaga yang rendah dalam bangunan?
- Pengasas bersama OpenAI ditemu bual oleh Huang Renxun: Keupayaan penaakulan GPT-4 belum mencapai jangkaan
- Bing Microsoft mengatasi Google dalam trafik carian terima kasih kepada teknologi OpenAI