
Rumah >Peranti teknologi >AI >Cara Memudahkan Pecutan Perkakasan Robot Menggunakan ROS 2
Cara Memudahkan Pecutan Perkakasan Robot Menggunakan ROS 2

- 王林ke hadapan
- 2023-04-09 16:01:111304semak imbas
Penterjemah |. Li Rui
Pengulas |. Dengan kemunculan robot kolaboratif industri rendah, terdapat pembangun perisian yang tertumpu semata-mata pada pembangunan perisian yang berjalan pada perkakasan sedia ada. Walau bagaimanapun, terdapat hubungan penting antara perkakasan robot dan keupayaan perisian. Kawalan reka bentuk ke atas perkakasan pengkomputeran perlu dikekalkan untuk mencipta robot yang lebih profesional, cekap tenaga, selamat dan berprestasi tinggi.
 Cabaran Perkakasan dan Kemahiran Perisian
Cabaran Perkakasan dan Kemahiran Perisian
Pakar robotik mesti mengatasi halangan yang dihadapi oleh perkakasan jika mereka berharap untuk menyampaikan robot yang lebih baik dan pantas yang akan dituntut pada masa hadapan . Dalam dunia pengkomputeran pasca Moore, menaik taraf perkakasan untuk menerima pakai mikropemproses generasi terkini tidak akan memberikan peningkatan prestasi aplikasi yang diingini. Laluan ke hadapan tidak lagi terletak pada menunggu cip terkini. Pecutan perkakasan selalunya merupakan satu-satunya cara untuk mencapai keuntungan yang diperlukan.
Cabaran perkakasan ini merumitkan kerja pembangun dalam disiplin seperti robotik, yang kemahiran mereka sering condong ke arah membangunkan perisian. Ini bermakna mereka mesti menghadapi prospek mereka bentuk perkakasan pengkomputeran adaptif jika mereka ingin memenuhi permintaan pasaran untuk robot industri baharu. Perniagaan yang menggunakan robot untuk meningkatkan produktiviti dalam bidang seperti barisan pengeluaran dan gudang sedang mencari peranti yang menawarkan fleksibiliti tambahan, kawalan kedudukan yang lebih baik, keupayaan berasaskan penglihatan yang unggul, penangkapan data yang lebih baik dan penggunaan kuasa yang lebih rendah.
Prinsip utama pecutan perkakasan robotik ialah, tidak seperti pendekatan dipacu kawalan tradisional, kawalan hibrid dan pendekatan dipacu data kepada pembangunan perisian membolehkan pasukan mereka bentuk seni bina pengkomputeran tersuai yang memperuntukkan jumlah perkakasan yang optimum kepada sumber aplikasi.
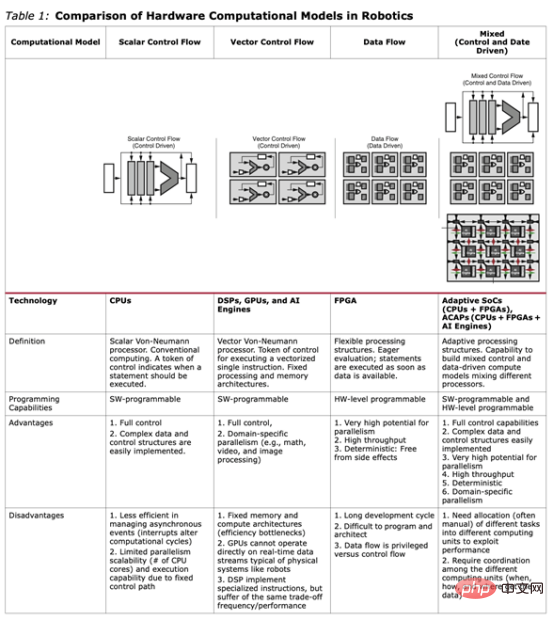
Dari segi pelaksanaan, model pengkomputeran heterogen diperlukan. Ini mengambil kesempatan daripada CPU dan GPU, yang cemerlang dalam pengiraan aliran kawalan, sambil memanfaatkan kekuatan FPGA untuk mengendalikan pengiraan aliran data. Pendekatan ini menyediakan kedua-dua fleksibiliti dan kawalan penuh ke atas CPU/GPU untuk melaksanakan pengiraan yang kompleks dengan penggunaan kuasa yang rendah, prestasi tinggi, kependaman rendah dan penentuan pecutan perkakasan. Pelbagai vendor kini menawarkan peranti adaptif system-on-chip (SoC) dan system-on-module (SOM), seperti AMD-Xilinx Kria™ SOM dan tindanan robotik Kria yang berkaitan, yang menawarkan faedah model pengkomputeran hibrid ini . Jadual ini membandingkan model yang berbeza ini.
 Sistem adaptif pada cip (SoC) dan sistem pada modul (SOM) membolehkan robotik membina tingkah laku mesin dengan memprogramkan seni bina yang mencipta laluan data dan mekanisme kawalan yang betul . Walau bagaimanapun, kemahiran kejuruteraan yang canggih diperlukan untuk memprogramkan seni bina tersebut menggunakan alat dan teknik yang telah ditetapkan.
Sistem adaptif pada cip (SoC) dan sistem pada modul (SOM) membolehkan robotik membina tingkah laku mesin dengan memprogramkan seni bina yang mencipta laluan data dan mekanisme kawalan yang betul . Walau bagaimanapun, kemahiran kejuruteraan yang canggih diperlukan untuk memprogramkan seni bina tersebut menggunakan alat dan teknik yang telah ditetapkan.
Pakar robotik tidak mempunyai perkakasan yang sesuai dan kepakaran reka bentuk terbenam serta terbiasa membina tingkah laku dalam bentuk graf pengiraan untuk menyelesaikan tugasan robotik semasa. Mereka sering menggunakan C++ untuk mencipta sistem penentuan masa nyata yang kompleks melalui amalan kejuruteraan perisian lanjutan.
Dibina pada Sistem Pengendalian Robot (ROS)
Pendekatan berbeza kini diperlukan untuk membantu pakar robotik memanfaatkan teknologi pecutan perkakasan yang tersedia. Sebaik-baiknya, pendekatan ini harus membenarkan mereka mencipta perkakasan tersuai dalam persekitaran pembangunan yang biasa (seperti ROS) dan mensimulasikannya menggunakan alat biasa (seperti Gazebo).
ROS ialah piawaian industri de facto untuk pembangunan aplikasi robotik, lebih-lebih lagi sejak pengenalan ROS2 pada 2020. Ini telah menjadi kit pembangunan perisian lalai (SDK) untuk aplikasi robotik merentas industri, dengan banyak kumpulan kini menggunakan ROS dan Gazebo.
Inisiatif sebelum ini untuk mengintegrasikan pengkomputeran adaptif ke dalam ROS telah menangani cabaran ini dari perspektif jurutera perkakasan. Mereka menganggap bahawa pengguna mempunyai pengalaman terdahulu dengan aliran terbenam dan perkakasan dan oleh itu sudah biasa dengan konsep seperti RTL, HDL dan HLS serta alatan reka bentuk yang digunakan untuk mengendalikannya. Begitu juga, penggunaan kepada sasaran terbenam memerlukan sedikit pemahaman tentang Yocto, OpenEmbedded dan alatan yang berkaitan.
Memahami bahawa kebanyakan pakar robotik bukan berasal dari latar belakang ini, Kumpulan Kerja Pecutan Perkakasan ROS2 (HAWG) mengambil pendekatan berpusatkan ROS untuk menyepadukan proses terbenam terus ke dalam ekosistem ROS. Ia bertujuan untuk memberikan pengalaman yang serupa seperti yang dinikmati oleh pakar robotik apabila membina ruang kerja ROS dalam stesen kerja desktop.
Kerja HAWG dibina berdasarkan penyelidikan yang diterbitkan tentang mengoptimumkan graf pengiraan ROS untuk memanfaatkan pengiraan penyesuaian, serta cadangan tentang alatan dan kaedah untuk mempercepatkan bahagian graf dalam logik boleh atur cara. Selain itu, HAWG kini mencadangkan seni bina (gambar di bawah) yang memfokuskan pada bahasa biasa seperti C++ dan OpenCL.
ROS 2 dan HAWG tindanan bersama memudahkan pecutan perkakasan
Seni bina yang dicadangkan adalah platform agnostik dan oleh itu sesuai untuk kemudahan tepi, stesen kerja, pusat data atau platform pengkomputeran awan, dan agnostik teknologi untuk membenarkan penyasaran FPGA, CPU dan GPU dan mudah dipindahkan ke pelbagai modul dan papan induk.
Akhirnya, kerja ini sepatutnya membolehkan kebanyakan pakar robotik memanfaatkan peluang pecutan perkakasan untuk melaksanakan generasi seterusnya robot canggih dan kompleks.
Tajuk asal: Memudahkan pecutan perkakasan untuk robot dengan ROS 2, pengarang: Ben Dickson
Atas ialah kandungan terperinci Cara Memudahkan Pecutan Perkakasan Robot Menggunakan ROS 2. Untuk maklumat lanjut, sila ikut artikel berkaitan lain di laman web China PHP!
Artikel berkaitan
Lihat lagi- Aliran teknologi untuk ditonton pada tahun 2023
- Cara Kecerdasan Buatan Membawa Kerja Baharu Setiap Hari kepada Pasukan Pusat Data
- Bolehkah kecerdasan buatan atau automasi menyelesaikan masalah kecekapan tenaga yang rendah dalam bangunan?
- Pengasas bersama OpenAI ditemu bual oleh Huang Renxun: Keupayaan penaakulan GPT-4 belum mencapai jangkaan
- Bing Microsoft mengatasi Google dalam trafik carian terima kasih kepada teknologi OpenAI