
Rumah >Peranti teknologi >AI >Algoritma kawalan yang lebih sutera daripada PID & Carnegie Mellon University
Algoritma kawalan yang lebih sutera daripada PID & Carnegie Mellon University

- 王林asal
- 2024-06-09 09:57:28843semak imbas

Algoritma kawalan MPC, nama penuhnya ialah Model Predictive Control (Model Predictive Control), ialah teknologi kawalan berdasarkan model dinamik sistem. Ia berfungsi dengan meramalkan kelakuan masa depan sistem melalui model matematik dan mengoptimumkan input kawalan sistem berdasarkan ramalan ini untuk mencapai output yang diingini. Idea teras algoritma kawalan MPC adalah untuk mendapatkan input kawalan terbaik dengan mengoptimumkan keputusan ramalan untuk satu tempoh masa pada masa hadapan dalam setiap kitaran kawalan. Pengoptimuman ini adalah berdasarkan beberapa keputusan ramalan untuk mengoptimumkan input kawalan sistem untuk mencapai output yang dikehendaki. Algoritma kawalan MPC digunakan secara meluas dan amat sesuai untuk sistem kawalan yang perlu memenuhi beberapa kekangan. Dengan menggabungkan model sistem dan teknik pengoptimuman, MPC boleh digunakan dalam industri yang berbeza Teras algoritma kawalan MPC terletak pada model ramalannya, yang boleh meramalkan keadaan sistem masa hadapan berdasarkan maklumat keadaan semasa sistem. Bentuk model ramalan tidak tetap dan boleh menjadi persamaan ruang keadaan, fungsi pemindahan, model tindak balas langkah, model tindak balas impuls, model kabur, dll. Bentuk khusus bergantung kepada objek terkawal dan keadaan yang perlu diramalkan.
TinyMPC ialah penyelesai sumber terbuka yang disesuaikan untuk kawalan ramalan model cembung, memberikan pengiraan berkelajuan tinggi. TinyMPC dilaksanakan dalam C++ dengan kebergantungan yang minimum dan amat sesuai untuk kawalan terbenam dan aplikasi robotik pada platform yang dikekang aset. TinyMPC boleh mengendalikan sempadan keadaan dan input serta kekangan tertib kedua. Antara muka Python, Julia dan MATLAB tersedia untuk membantu menjana kod untuk sistem terbenam.
Bot DemoTinyMPC menyediakan sokongan untuk aplikasi pengkomputeran yang dipertingkatkan privasi dan boleh digunakan untuk merapatkan jurang antara pengiraan berbilang pihak yang selamat dan platform pemprosesan yang dikekang oleh sumber. Mengintegrasikan TinyMPC ke dalam robot dengan kuasa pengkomputeran yang tidak mencukupi membolehkan mereka melakukan operasi dengan cepat dan mempamerkan kelebihan pelaksanaan yang selamat. . Di sebelah kiri, sfera maya yang berpusat di hujung kayu bedik dilinearkan menjadi set kekangan hyperplane baharu pada setiap langkah masa. Algoritma ini juga boleh mengendalikan sebarang nombor bagi sebarang bilangan kekangan linear arbitrari yang bermakna. Contohnya, di sebelah kanan, ia mengelak hujung kayu di hujung kayu semasa berada di dalam pesawat yz.
Pemulihan Postur Ekstrim
TinyMPC boleh memulakan pemulihan dalam keadaan yang melampau. Dalam contoh ini ia dibandingkan dengan pengawal asal Crazyflie 2.1. Hanya TinyMPC boleh menembusi had kawalan dan mencapai operasi pemulihan yang bersih. . TinyMPC dan PID dapat kekal tegak, tetapi trajektori TinyMPC lebih hampir kepada bentuk angka lapan.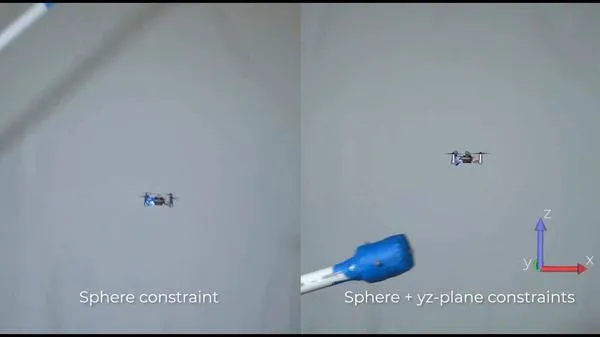
Tanda Aras Pengawal Mikro
Dalam tanda aras mikropengawal, TinyMPC mengatasi prestasi penyelesaian terkini dari segi kelajuan dan jejak memori. Kami menyelesaikan masalah MPC berasaskan QP yang dijana secara rawak dan membandingkan masa lelaran dan jejak memori dengan OSQP. Kelajuan maksimum TinyMPC pada OSQP adalah 8x ganda berbanding OSQP dengan memori yang lebih sedikit.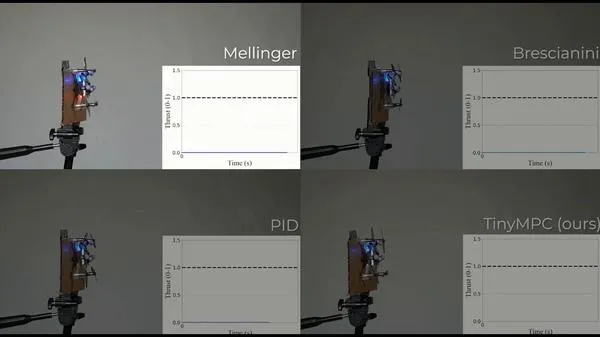
TinyMPC kini juga mampu menangani kekangan kon! Dalam (b) kami menanda aras TinyMPC terhadap dua penyelesai kon sedia ada (SCS dan ECOS) dengan sokongan terbenam untuk masalah pendaratan lembut roket. TinyMPC mencapai kelajuan purata 13x pada SCS dan 137x pada ECOS.
Kawalan masa nyata memerlukan penyelesai untuk mengembalikan penyelesaian dalam tetingkap masa yang ketat. Prestasi pengesanan trajektori TinyMPC dibandingkan dengan SCS dan ECOS pada masalah pendaratan lembut roket sambil mengubah secara buatan jumlah masa yang tersedia untuk setiap penyelesaian. TinyMPC mempunyai lebih sedikit pelanggaran kekangan dan ralat penjejakan yang lebih rendah daripada SCS dan ECOS merentas semua tempoh kawalan. 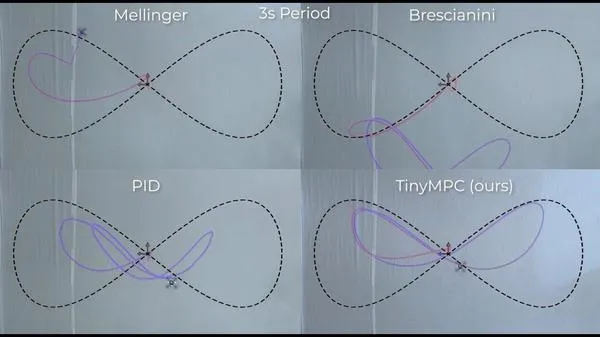
Penyumbang Algoritma:
Alamat pemerolehan kod:
GitHub - TinyMPC/TinyMPC: Kawalan ramalan model untuk mikropengawal
Atas ialah kandungan terperinci Algoritma kawalan yang lebih sutera daripada PID & Carnegie Mellon University. Untuk maklumat lanjut, sila ikut artikel berkaitan lain di laman web China PHP!