
온라인 매핑과 궤적 예측을 긴밀하게 통합하는 방법은 무엇입니까?

- PHPz앞으로
- 2024-04-03 12:00:181300검색
원제: 궤적 예측에서 온라인 지도 불확실성 생성 및 활용
논문 링크: https://arxiv.org/pdf/2403.16439.pdf
코드 링크: https://github.com/alfredgu001324/MapUncertaintyPrediction
저자 소속: 토론토 대학교 벡터 연구소 NVIDIA Research
제목 아이디어:
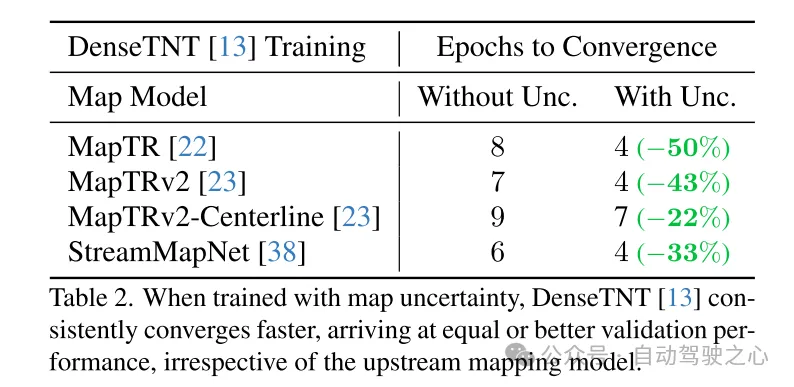
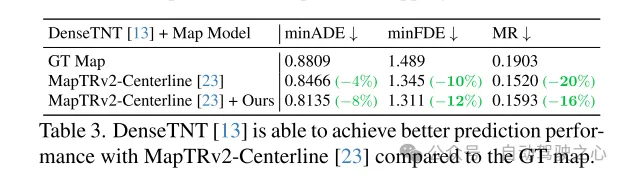
고정밀(HD) 지도는 현대 자율주행차(AV) 기술 스택의 개발에 없어서는 안 될 역할을 합니다. 그리고 이와 관련된 유지관리 비용도 높습니다. 따라서 최근의 많은 연구에서는 센서 데이터로부터 HD 지도를 온라인으로 추정하는 방법을 제안하여 자율주행 기술 스택의 통합을 복잡하게 만들고 있습니다. 특히 불확실성이나 신뢰도 추정치를 생성하지 않습니다. 이 논문은 다양한 최첨단 온라인 지도 추정 방법을 확장하여 불확실성에 대한 추가 추정을 가능하게 하고 실제 nuScenes 구동 데이터 세트에서 예측력을 최대 15%까지 향상시킵니다. 그 과정에서 우리는 불확실성을 통합하면 훈련 수렴이 최대 50% 향상되고 실제 nuScenes 구동 데이터세트에 대한 예측력이 최대 15% 향상된다는 사실을 발견했습니다.
주요 기여:
이 문서는 일반적인 벡터화된 지도 불확실성 설명을 소개하고 많은 최첨단 온라인 지도 추정 방법을 확장하여 순수 구성 그래프 성능을 저하시키지 않고 불확실성 추정치를 추가로 출력합니다.
본 논문은 지도 불확실성의 잠재적 원인을 실증적으로 분석하고, 현재의 지도 추정 방법에 대한 신뢰도가 부족함을 확인하며, 향후 연구 방향에 대한 정보를 제공합니다.
이 기사에서는 다양한 최첨단 궤적 예측 방법과 결합된 최근 온라인 지도 추정 모델에 대해 논의하고, 온라인 매핑 불확실성을 통합하여 다운스트림 예측 모델의 성능 및 훈련 특성을 크게 개선하고 훈련 수렴을 가속화하는 방법을 보여줍니다. 50%로 증가하고 온라인 예측 정확도가 15% 향상됩니다.
네트워크 설계:
자율 주행의 핵심 구성 요소는 자율 주행 차량(AV) 주변의 도로 레이아웃 및 교통 상황과 같은 정적 환경을 이해하는 것입니다. 따라서 이러한 정보를 포착하고 제공하기 위해 도로 경계, 차선 구분선, 센티미터 수준의 도로 표시와 같은 의미 정보를 포함하는 고정밀(HD) 지도가 개발되었습니다. 최근 몇 년 동안 HD 지도는 자율주행차의 개발 및 배치에 필수적인 것으로 입증되었으며 오늘날 널리 사용되고 있습니다[35]. 그러나 HD 지도는 시간이 지남에 따라 주석을 달고 유지 관리하는 데 비용이 많이 들고 지오펜스된 영역에서만 사용할 수 있어 자율주행차의 확장성이 제한됩니다. ”.
이러한 문제를 해결하기 위해 최근의 많은 연구에서는 센서 데이터로부터 고정밀(HD) 지도를 온라인으로 추정하는 방향으로 전환하고 있습니다. 광범위하게 말하면 일반적으로 다각형이나 지도 요소의 위치와 범주를 예측하는 것을 목표로 합니다. 그러나 현재의 온라인 지도 추정 방법은 카메라 이미지 및 LiDAR 스캔에서 관련 불확실성이나 신뢰도 정보를 생성하지 않으며, 이는 하위 소비자에게 숨겨진 정보로 이어지기 때문에 문제가 있습니다. 추론된 지도 구성 요소는 결정론적이라고 암시적으로 가정됩니다. 매핑 오류(예: 지도 요소의 잘못된 이동 또는 배치)로 인해 잘못된 다운스트림 동작이 발생할 수 있습니다. 이를 위해 본 논문에서는 온라인 지도 추정 방법의 지도 불확실성을 밝히고 이를 다운스트림 모듈에 통합할 것을 제안합니다. 이 논문에서는 지도 불확실성을 궤적 예측에 통합하고 지도 불확실성을 통합한 매퍼-예측 시스템(그림 1)이 그렇지 않은 시스템보다 성능이 크게 향상되었음을 확인했습니다.
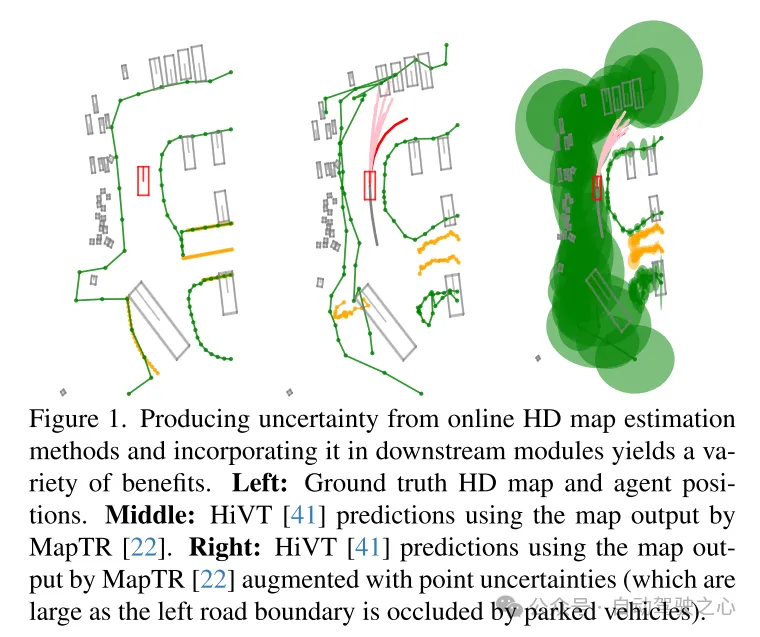
그림 1. 온라인 고정밀(HD) 지도 추정 방법에서 불확실성을 생성하고 이를 다운스트림 모듈에 통합하면 여러 가지 이점을 얻을 수 있습니다. 그림 왼쪽: MapTR [22] 출력 맵을 사용한 실제 HD 지도 및 에이전트 위치 예측. 오른쪽: 점 불확실성이 추가된 MapTR [22] 출력을 사용한 지도. 주차된 차량으로 인해 경계가 가려지고 불확실성이 큰 HiVT [41] 예측
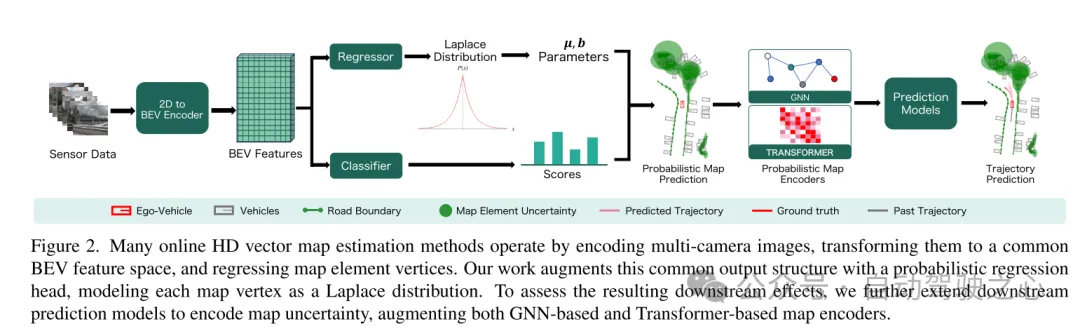
그림 2. 많은 온라인 고정밀 벡터 맵 추정 방법은 다중 카메라 이미지를 인코딩하고 이를 일반적인 조감도 그래프(BEV) 기능 공간으로 변환하고 맵 요소의 정점을 회귀하여 작동합니다. 확률적 회귀 헤드, 평가를 위해 각 지도 꼭지점을 라플라시안 분포로 모델링합니다. 결과적인 다운스트림 효과를 통해 이 논문은 다운스트림 예측 모델을 더욱 확장하여 지도 불확실성을 인코딩하여 그래프 신경망(GNN) 기반 및 변환기 기반 지도 인코더를 향상시킵니다. .
실험 결과:
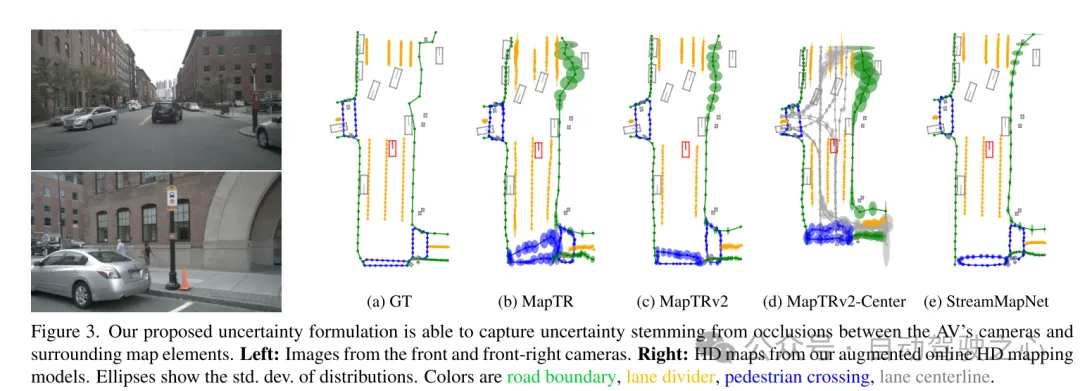
그림 3. 본 논문에서 제안된 불확실성 표현은 자율주행차(AV)의 카메라와 주변 지도 요소 사이의 폐색으로 인한 불확실성을 포착할 수 있습니다. 왼쪽: 전면 및 전면 오른쪽 카메라의 이미지. 오른쪽: 이 기사에서 강화된 온라인 고정밀 지도 모델로 생성된 HD 지도. 타원은 분포의 표준 편차를 나타냅니다. 색상은 도로 경계, 차선 구분선, 횡단보도 및 차선 중앙선을 나타냅니다.
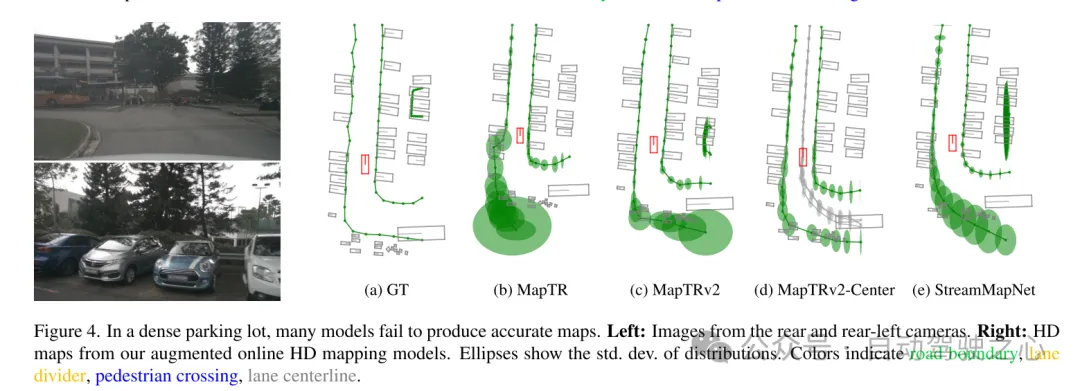
그림 4. 밀집된 주차장에서는 많은 모델이 정확한 지도를 생성하지 못합니다. 왼쪽: 후면 및 후면 왼쪽 카메라 이미지. 오른쪽: 이 기사에서 강화된 온라인 고정밀 지도 모델로 생성된 HD 지도. 타원은 분포의 표준 편차를 보여줍니다. 색상은 도로 경계, 차선 구분선, 횡단보도 및 차선 중앙선을 나타냅니다.
요약:
이 논문은 일반적인 벡터화된 지도 불확실성 공식을 제안하고 MapTR [22], TRv2 [23] 및 StreamMapNet [38]을 사용하여 불확실성을 추가로 출력할 수 있습니다. 우리는 결과적인 불확실성을 체계적으로 분석하고 우리의 접근 방식이 불확실성의 많은 원인(폐색, 카메라와의 거리, 시간 및 날씨)을 포착한다는 것을 발견했습니다. 마지막으로, 이 논문은 이러한 온라인 지도 추정 모델을 최첨단 궤도 예측 방법(DenseTNT [13] 및 HiVT [41])과 결합하고 온라인 지도 불확실성을 통합하면 예측 모델의 성능 및 훈련 특성이 크게 향상됨을 보여줍니다. , 각각 최대 15% 및 50%. 흥미로운 미래 연구 방향은 이러한 불확실성 출력을 사용하여 지도 모델의 보정을 측정하는 것입니다([16]과 유사). 그러나 이 작업은 퍼지 점 집합 일치가 필요하기 때문에 복잡하며, 이는 그 자체로 어려운 문제입니다.
인용:
Gu X, Song G, Gilitschenski I, et al. 궤적 예측의 온라인 지도 불확실성 생성 및 활용[J] arXiv 사전 인쇄 arXiv:2403.16439, 2024.
위 내용은 온라인 매핑과 궤적 예측을 긴밀하게 통합하는 방법은 무엇입니까?의 상세 내용입니다. 자세한 내용은 PHP 중국어 웹사이트의 기타 관련 기사를 참조하세요!