
집 >소프트웨어 튜토리얼 >컴퓨터 소프트웨어 >Mind+ 프로그래밍으로 걷는 로봇 만드는 법 - Mind+ 프로그래밍으로 걷는 로봇 만드는 법
Mind+ 프로그래밍으로 걷는 로봇 만드는 법 - Mind+ 프로그래밍으로 걷는 로봇 만드는 법

- 王林앞으로
- 2024-03-06 10:19:051190검색
php 편집기 바나나는 오늘 Mind+ 프로그래밍이라는 소프트웨어를 소개합니다. 이 소프트웨어를 통해 우리는 쉽게 걷는 로봇을 만들 수 있습니다. 이 기사에서는 Mind+ 프로그래밍을 사용하여 걷는 로봇을 만드는 방법을 자세히 설명하여 모든 사람이 빠르게 시작하고 프로그래밍이 가져오는 재미와 성취감을 누릴 수 있도록 할 것입니다. 이 흥미로운 세계를 함께 탐험해 봅시다!
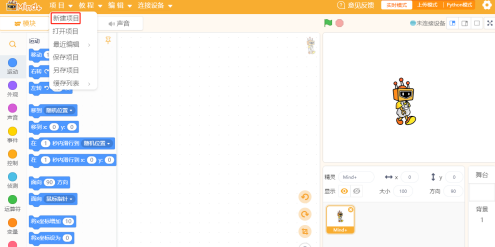
Mind+를 열고 마우스 왼쪽 버튼으로 [프로젝트]-[새 프로젝트]를 클릭한 후 새 엘프를 생성하고 엘프 이름을 [걷는 로봇]으로 변경합니다.
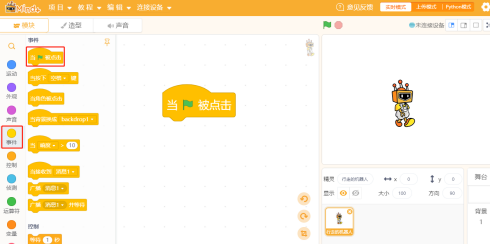
[이벤트]를 클릭하고 [작은 녹색 깃발]을 프로그래밍 인터페이스로 드래그하세요.
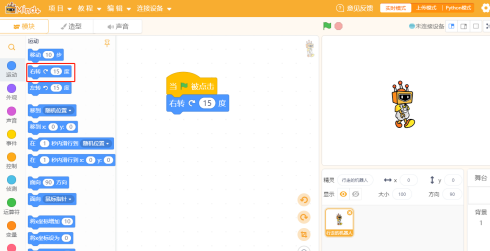
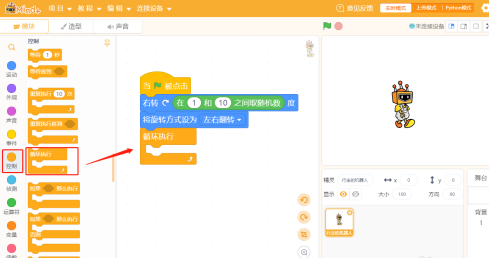
[이동]을 클릭하고 [작은 녹색 깃발] 아래에 [우회전(15)도]를 연결합니다.
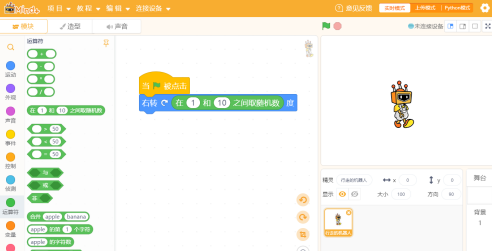
[연산자]를 클릭하고 [(1)과 (10) 사이의 난수 가져오기]를 프로그래밍 인터페이스로 드래그한 다음 [우회전(15)도]에 삽입합니다.
[이동]을 클릭하고 [오른쪽으로 회전하고 (1)과 (10) 사이에서 임의의 각도를 취함] 아래의 [왼쪽 및 오른쪽으로 뒤집기 위한 회전 방법 설정]을 연결합니다.

[제어]를 클릭하고 [좌우 뒤집기로 회전 모드 설정] 아래에 [루프 실행]을 연결합니다.
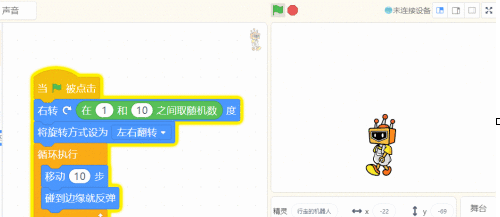
[Movement]를 클릭하고 [Loop Execution] 내에서 [Move (10) Steps]를 연결한 다음 [Move (10) Steps] 아래에 [Rebound when touch the edge]를 연결하세요.

실행하려면 작은 녹색 깃발을 클릭하세요.
위 내용은 Mind+ 프로그래밍으로 걷는 로봇 만드는 법 - Mind+ 프로그래밍으로 걷는 로봇 만드는 법의 상세 내용입니다. 자세한 내용은 PHP 중국어 웹사이트의 기타 관련 기사를 참조하세요!