
ホームページ >テクノロジー周辺機器 >AI >オンライン マッピングと軌道予測を緊密に統合するにはどうすればよいですか?
オンライン マッピングと軌道予測を緊密に統合するにはどうすればよいですか?

- PHPz転載
- 2024-04-03 12:00:181330ブラウズ
原題: Producing and Leveraging Online Map Uncertainty in Trajectory Prediction
論文リンク: https://arxiv.org/pdf/2403.16439.pdf
コードリンク: https ://github.com/alfredgu001324/MapUncertaintyPrediction
著者の所属: Vector Institute NVIDIA Research、トロント大学、スタンフォード大学
#論文のアイデア:
高精細 (HD) マップは、これに関連する注釈とメンテナンスのコストが高いにもかかわらず、最新の自動運転車 (AV) 技術スタックの開発において不可欠な役割を果たしてきました。したがって、最近の多くの研究では、センサー データから HD マップをオンラインで推定する方法が提案されており、自動運転技術スタックへの統合が複雑になっています。特に、不確実性や信頼度の推定値は生成されません。この論文では、複数の最先端のオンライン地図推定方法を拡張して、不確実性の追加推定を可能にし、実世界の nuScenes 走行データセットの予測力を最大 15% 向上させます。その過程で、不確実性を組み込むことでトレーニングの収束が最大 50% 向上し、現実世界の nuScenes 運転データセットの予測力が最大 15% 向上することがわかりました。
主な貢献:
この論文では、一般的なベクトル化された地図の不確実性の説明を紹介し、多くの最先端のオンライン地図推定方法を拡張して出力の不確実性を追加します。純粋なマッピングのパフォーマンスを低下させることなく推定します。
この論文は、地図の不確実性の潜在的な原因を実証的に分析し、現在の地図推定方法に対する信頼性の欠如を確認し、将来の研究の方向性のための情報を提供します。
この記事では、複数の最先端の軌道予測手法と組み合わせた最近のオンライン地図推定モデルについて説明し、オンライン マッピングの不確実性を組み込むことで下流予測モデルのパフォーマンスとトレーニング特性がどのように大幅に改善されるかを示します。トレーニングの収束を最大 50% 加速し、オンライン予測精度を最大 15% 向上させます。
ネットワーク設計:
自動運転の重要な要素は、自動運転車 (AV) の周囲の道路レイアウトや交通状況などの静的環境を理解することです。したがって、道路境界線、車線分割線、センチメートルレベルの道路標示などの意味情報を含む、そのような情報を取得して提供する高精度 (HD) 地図が開発されました。近年、HD マップは自動運転車の開発と展開に不可欠であることが証明され、現在広く使用されています [35]。ただし、HD マップは、時間の経過とともに注釈を付けて維持するのに費用がかかり、ジオフェンスで囲まれたエリアでのみ使用できるため、自動運転車の拡張性が制限されます。 ”.
これらの問題に対処するために、最近の研究の多くは、センサー データからの高精度 (HD) 地図のオンライン推定に注目しています。大まかに言えば、それらは、通常は地図要素の位置とカテゴリを予測することを目的としています。多角形またはポリラインの形式は、すべてカメラ画像とライダー (LiDAR) スキャンから得られます。しかし、現在のオンライン地図推定方法では、関連する不確実性や信頼性情報が生成されません。これは、下流のユーザー (消費者) が暗黙のうちに仮定することになるため、問題があります。推論された地図コンポーネントは決定論的であり、マッピング エラー (地図要素の不適切な移動や配置など) は下流での誤った動作につながる可能性があるということを目的として、この論文では、オンライン地図推定方法の違いを明らかにすることを提案しています。具体的には、この論文では、地図の不確実性を軌道予測に組み込み、地図の不確実性を組み込んだマッパー予測システム (図 1) が、そうでないシステムよりも優れていることを示しています。
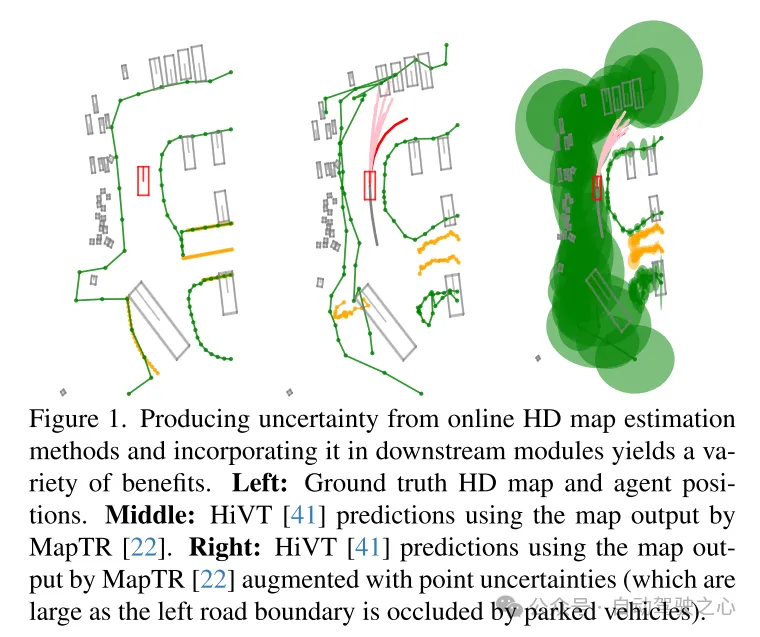
図 1. オンライン高精度 (HD) 地図推定手法から不確実性が生成され、それを下流モジュールに組み込むことでさまざまな利点がもたらされます。リアル HD マップとエージェントの位置 中央: MapTR[22] 出力マップを使用した HiVT[41] 予測 右: MapTR[22] 出力を使用したマップとポイント不確実性を追加した HiVT[41] 予測 (不確実性が大きいため)
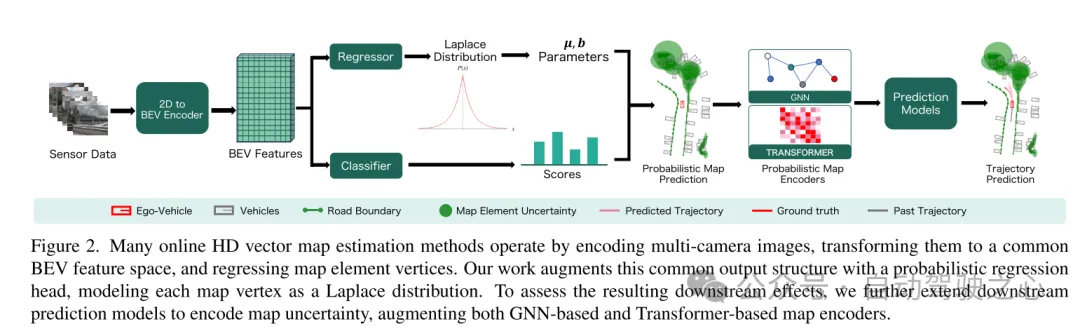
図 2. 多くのオンライン高精度ベクトル地図推定手法は、マルチカメラ画像をエンコードして変換することによって機能します。共通の鳥瞰図 (BEV) 特徴空間に変換し、マップ要素の頂点を回帰します。私たちの研究では、確率回帰ヘッドを追加することでこれを行います。この共通の出力構造は、各マップの頂点をラプラシアン分布としてモデル化することによって強化されます。結果として生じる下流の影響に対処するため、この論文では下流の予測モデルをさらに拡張してマップの不確実性をエンコードし、グラフ ニューラル ネットワーク (GNN) とトランスフォーマー ベースのマップ エンコーダを強化します。
実験結果:
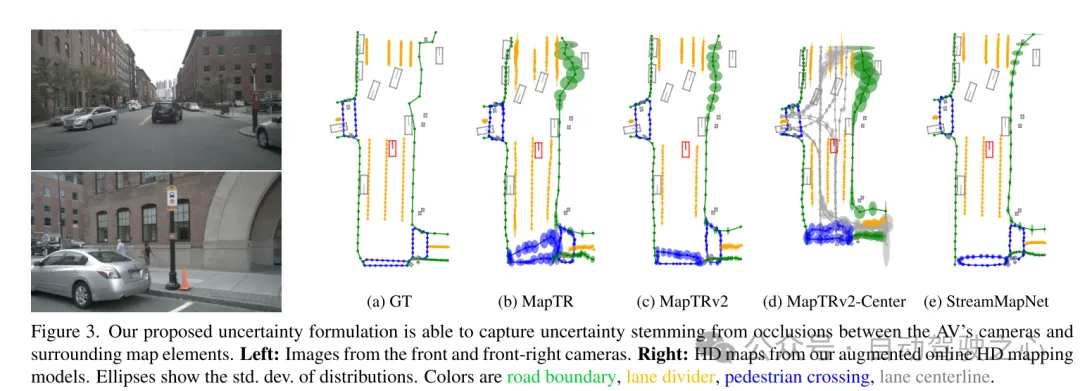
図 3. この記事で提案する不確実性表現は、自動運転車 (AV) のカメラ間の違いを捉えることができます。 ) と周囲の環境 マップ要素間のオクルージョンによる不確実性。左: フロントカメラとフロント右カメラからの画像。右: この記事で強化されたオンライン高精度地図モデルによって生成された HD 地図。楕円は分布の標準偏差を表します。色は、道路の境界、車線分離帯、横断歩道、車線の中心線を表します。
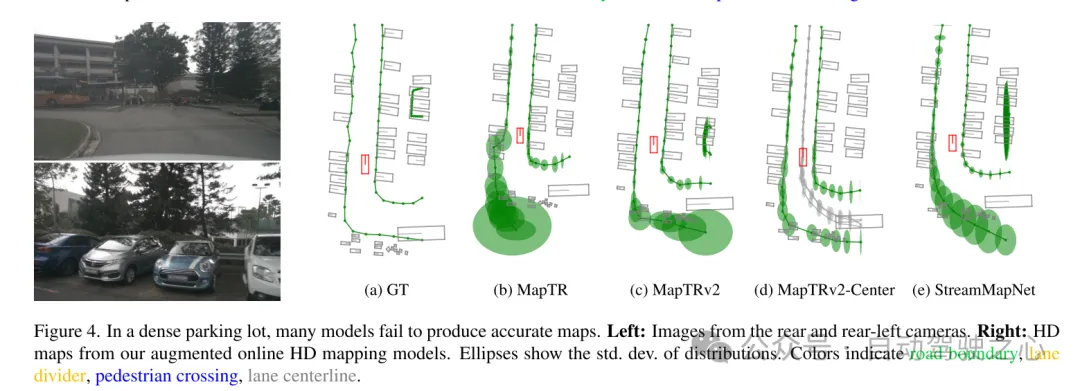
# 図 4. 密集した駐車場では、多くのモデルが正確なマップを生成できません。左: リアおよびリア左カメラの画像。右: この記事で強化されたオンライン高精度地図モデルによって生成された HD 地図。楕円は分布の標準偏差を示します。色は、道路の境界線、車線分割線、横断歩道、車線の中心線を表します。
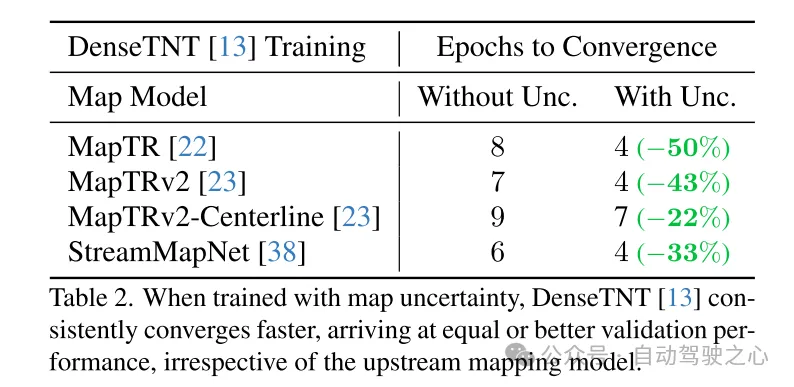
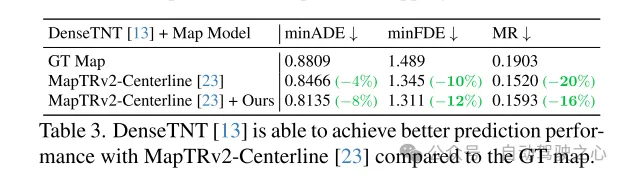
この論文では、一般的なベクトル化された地図の不確実性公式を提案し、MapTR [22]、MapTRv2 [23]、StreamMapNet [38] などのさまざまな最新のオンライン地図推定方法を拡張します。不確実性をさらに出力できるようになります。私たちは結果として生じる不確実性を体系的に分析し、私たちのアプローチが多くの不確実性の原因 (オクルージョン、カメラからの距離、時刻、天候) を捉えていることを発見しました。最後に、この論文は、これらのオンライン地図推定モデルを最先端の軌道予測方法 (DenseTNT [13] および HiVT [41]) と組み合わせ、オンライン地図の不確実性を組み込むことで予測モデルのパフォーマンスとトレーニング特性が大幅に向上することを示します。それぞれ、最大 15% と 50%。将来の興味深い研究の方向性は、これらの不確実性出力を使用して地図モデルの校正を測定することです ([16] と同様)。ただし、このタスクは、ファジー点セットのマッチングが必要なため複雑になり、それ自体が困難な問題です。
引用:Gu X、Song G、Gilitschenski I 他、軌道予測におけるオンライン マップの不確実性の生成と活用[J]. arXiv プレプリント arXiv:2403.16439 、2024.
以上がオンライン マッピングと軌道予測を緊密に統合するにはどうすればよいですか?の詳細内容です。詳細については、PHP 中国語 Web サイトの他の関連記事を参照してください。