


Vision Pro にはもう 1 つの注目の新しい遊び方があり、今回は身体化された知性とリンクしています~
このように、MIT 担当者は Vision Pro のハンド トラッキング機能を使用して、次のことを実現しました。ロボット犬のリアルタイム制御。

ドアを開けるなどのアクションを正確に取得できるだけでなく、ほとんどの情報も取得できません。遅れ。

# デモが公開されるとすぐに、ネチズンが Goose Meizi を賞賛しただけでなく、さまざまな具現化知能研究者も興奮しました。
たとえば、清華大学の博士課程の学生: 
大胆に予測する人もいます: これが私たちが次世代のマシンと対話する方法です。

プロジェクトの実装方法については、作者
Park Younghyo (Younghyo Park) が GitHub で  オープンソース
オープンソース
Vision Pro を使用してロボット犬を訓練する
作者が開発したアプリを詳しく見てみましょう-- Tracking Steamer
Tracking Steamer
モーション トラッキング部分は主に Apple の ARKit ライブラリに依存しています。
ヘッド トラッキングは queryDeviceAnchor を呼び出します。 Digital Crown を長押しすると、ヘッド フレームを現在の位置にリセットできます。 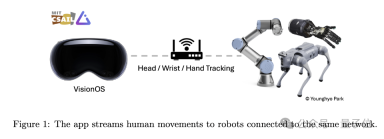
ネットワーク通信に関しては、このアプリはデータをストリーミングするためのネットワーク通信プロトコルとして gRPC を使用します。これにより、Linux、Mac、Windows デバイスなど、より多くのデバイスでデータをサブスクライブできるようになります。
さらに、データ送信を容易にするために、開発者がプログラムで Vision Pro からストリーミングされた追跡データをサブスクライブして受信できるようにする Python API も用意しました。 
多くの専門家が指摘しているように、ロボット犬の動きが依然として人間によって制御されているかどうかに関係なく、実際には、「制御」自体と比較して、模倣 アルゴリズムを学習する過程では、人間はロボットのコーチに似てきます。
Vision Pro は、ユーザーの動きを追跡することで直感的でシンプルな対話方法を提供し、専門家でなくてもロボットに正確なトレーニング データを提供できるようにします。 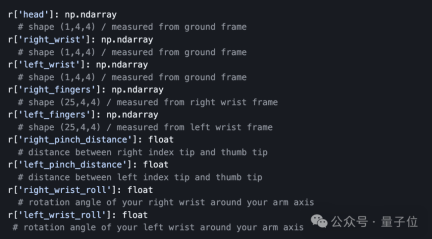
近い将来、人々は眼鏡をかけるのと同じように Vision Pro のようなデバイスを毎日着用するようになるかもしれません。その過程でどれだけのデータが収集されるのでしょうか。
これは、ロボットが人間と現実世界との関わり方を学習できる有望なデータ源です。
最後に、このオープンソース プロジェクトを試してみたい場合は、Vision Pro に加えて、次の準備も必要です。
## Apple はやはり利益を第一に考えなければならないようです (doge)。
- Apple 開発者アカウント
- Vision Pro 開発者アクセサリ (開発者ストラップ、価格は 299 ドル)
- Xcode がインストールされた Mac コンピュータ
プロジェクト リンク: https://github.com/Improbable-AI/VisionProTeleop?tab=readme-ov-file
# #
以上がVision Pro を使用してロボット犬をリアルタイムで訓練しましょう! MIT 博士課程学生のオープンソース プロジェクトが人気にの詳細内容です。詳細については、PHP 中国語 Web サイトの他の関連記事を参照してください。

 Huggingface smollmであなたの個人的なAIアシスタントを構築する方法Apr 18, 2025 am 11:52 AM
Huggingface smollmであなたの個人的なAIアシスタントを構築する方法Apr 18, 2025 am 11:52 AMオンデバイスAIの力を活用:個人的なチャットボットCLIの構築 最近では、個人的なAIアシスタントの概念はサイエンスフィクションのように見えました。 ハイテク愛好家のアレックスを想像して、賢くて地元のAI仲間を夢見ています。
 メンタルヘルスのためのAIは、スタンフォード大学でのエキサイティングな新しいイニシアチブによって注意深く分析されますApr 18, 2025 am 11:49 AM
メンタルヘルスのためのAIは、スタンフォード大学でのエキサイティングな新しいイニシアチブによって注意深く分析されますApr 18, 2025 am 11:49 AMAI4MHの最初の発売は2025年4月15日に開催され、有名な精神科医および神経科学者であるLuminary Dr. Tom Insel博士がキックオフスピーカーを務めました。 Insel博士は、メンタルヘルス研究とテクノでの彼の傑出した仕事で有名です
 2025年のWNBAドラフトクラスは、成長し、オンラインハラスメントの成長と戦いに参加しますApr 18, 2025 am 11:44 AM
2025年のWNBAドラフトクラスは、成長し、オンラインハラスメントの成長と戦いに参加しますApr 18, 2025 am 11:44 AM「私たちは、WNBAが、すべての人、プレイヤー、ファン、企業パートナーが安全であり、大切になり、力を与えられたスペースであることを保証したいと考えています」とエンゲルバートは述べ、女性のスポーツの最も有害な課題の1つになったものに取り組んでいます。 アノ
 Pythonビルトインデータ構造の包括的なガイド-AnalyticsVidhyaApr 18, 2025 am 11:43 AM
Pythonビルトインデータ構造の包括的なガイド-AnalyticsVidhyaApr 18, 2025 am 11:43 AM導入 Pythonは、特にデータサイエンスと生成AIにおいて、プログラミング言語として優れています。 大規模なデータセットを処理する場合、効率的なデータ操作(ストレージ、管理、アクセス)が重要です。 以前に数字とstをカバーしてきました
 Openaiの新しいモデルからの代替案からの第一印象Apr 18, 2025 am 11:41 AM
Openaiの新しいモデルからの代替案からの第一印象Apr 18, 2025 am 11:41 AM潜る前に、重要な注意事項:AIパフォーマンスは非決定論的であり、非常にユースケース固有です。簡単に言えば、走行距離は異なる場合があります。この(または他の)記事を最終的な単語として撮影しないでください。これらのモデルを独自のシナリオでテストしないでください
 AIポートフォリオ| AIキャリアのためにポートフォリオを構築する方法は?Apr 18, 2025 am 11:40 AM
AIポートフォリオ| AIキャリアのためにポートフォリオを構築する方法は?Apr 18, 2025 am 11:40 AM傑出したAI/MLポートフォリオの構築:初心者と専門家向けガイド 説得力のあるポートフォリオを作成することは、人工知能(AI)と機械学習(ML)で役割を確保するために重要です。 このガイドは、ポートフォリオを構築するためのアドバイスを提供します
 エージェントAIがセキュリティ運用にとって何を意味するのかApr 18, 2025 am 11:36 AM
エージェントAIがセキュリティ運用にとって何を意味するのかApr 18, 2025 am 11:36 AM結果?燃え尽き症候群、非効率性、および検出とアクションの間の隙間が拡大します。これは、サイバーセキュリティで働く人にとってはショックとしてはありません。 しかし、エージェントAIの約束は潜在的なターニングポイントとして浮上しています。この新しいクラス
 Google対Openai:学生のためのAIの戦いApr 18, 2025 am 11:31 AM
Google対Openai:学生のためのAIの戦いApr 18, 2025 am 11:31 AM即時の影響と長期パートナーシップ? 2週間前、Openaiは強力な短期オファーで前進し、2025年5月末までに米国およびカナダの大学生にChatGpt Plusに無料でアクセスできます。このツールにはGPT ‑ 4o、Aが含まれます。


ホットAIツール

Undresser.AI Undress
リアルなヌード写真を作成する AI 搭載アプリ

AI Clothes Remover
写真から衣服を削除するオンライン AI ツール。

Undress AI Tool
脱衣画像を無料で

Clothoff.io
AI衣類リムーバー

AI Hentai Generator
AIヘンタイを無料で生成します。

人気の記事
ホットツール

SublimeText3 Linux 新バージョン
SublimeText3 Linux 最新バージョン

EditPlus 中国語クラック版
サイズが小さく、構文の強調表示、コード プロンプト機能はサポートされていません

PhpStorm Mac バージョン
最新(2018.2.1)のプロフェッショナル向けPHP統合開発ツール

MinGW - Minimalist GNU for Windows
このプロジェクトは osdn.net/projects/mingw に移行中です。引き続きそこでフォローしていただけます。 MinGW: GNU Compiler Collection (GCC) のネイティブ Windows ポートであり、ネイティブ Windows アプリケーションを構築するための自由に配布可能なインポート ライブラリとヘッダー ファイルであり、C99 機能をサポートする MSVC ランタイムの拡張機能が含まれています。すべての MinGW ソフトウェアは 64 ビット Windows プラットフォームで実行できます。

ZendStudio 13.5.1 Mac
強力な PHP 統合開発環境

