
ホームページ >テクノロジー周辺機器 >AI >SIMPL: 自動運転向けのシンプルで効率的なマルチエージェント動作予測ベンチマーク
SIMPL: 自動運転向けのシンプルで効率的なマルチエージェント動作予測ベンチマーク

- WBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWB転載
- 2024-02-20 11:48:22833ブラウズ
原題: SIMPL: A Simple and Efficient Multi-agent Motion Prediction Baseline for Autonomous Driving
論文リンク: https://arxiv.org/pdf/2402.02519.pdf
コードリンク: https://github.com/HKUST-Aerial-Robotics/SIMPL
著者の所属: 香港科技大学 DJI

#論文のアイデア:
この論文では、自動運転車向けのシンプルで効率的な動作予測ベースライン (SIMPL) を提案します。従来のエージェント中心の方法 (精度は高いが繰り返しの計算が必要) やシーン中心の方法 (精度と汎用性が損なわれる) とは異なり、SIMPL は関連するすべてのトラフィックに対する包括的なソリューションを提供でき、参加者はリアルタイムで正確な移動予測を提供します。精度と推論速度を向上させるために、この論文では、対称的な方法でダイレクトメッセージパッシングを実行し、ネットワークが単一のフィードフォワードパスですべての道路利用者の将来の動きを予測できるようにする、コンパクトで効率的なグローバル特徴融合モジュールを提案します。視点移動による損失。さらに、この論文では、連続軌道パラメータ化のための軌道デコードにおけるバーンスタイン基底多項式の使用を調査し、任意の時点での状態とその高次導関数の評価を可能にし、下流の計画タスクにとって価値があります。強力なベースラインとして、SIMPL は Argoverse 1 および 2 の動き予測ベンチマークで他の最先端の手法と比較して非常に優れたパフォーマンスを示します。さらに、SIMPL は軽量設計と低い推論遅延により、拡張性が高く、現実世界の航空機への展開に有望です。ネットワーク設計:
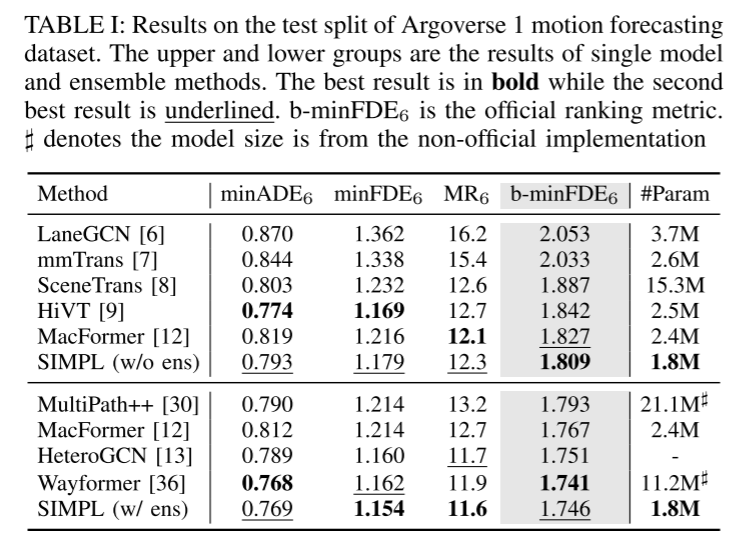
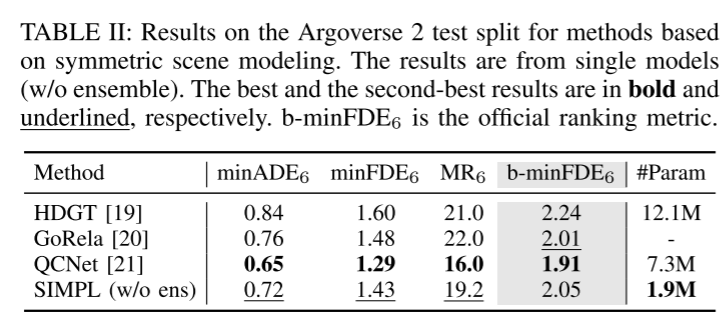
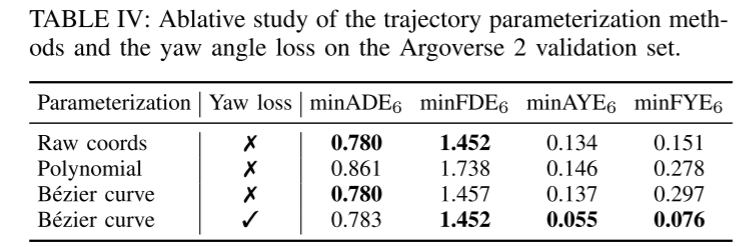
周囲の交通参加者の動きを予測することは、自動運転車にとって、特に下流の意思決定および計画モジュールにおいて重要です。意図や軌道を正確に予測することで、安全性と乗り心地が向上します。 学習ベースの動き予測の場合、最も重要なトピックの 1 つはコンテキスト表現です。初期の手法では、通常、周囲の風景をマルチチャンネルの鳥瞰図画像として表現していました [1] ~ [4]。対照的に、最近の研究では、ベクトル化されたシーン表現 [5] ~ [13] の採用が増えています。この表現では、地理座標を含む点セットまたはポリラインを使用して位置とジオメトリに注釈が付けられ、それによって忠実度が向上し、受容野が拡張されます。ただし、ラスター化表現とベクトル化表現の両方について、重要な問題があります。それは、これらすべての要素に対して適切な参照フレームをどのように選択すべきかということです。簡単なアプローチは、自動運転車を中心とした共有座標系 (シーンを中心とした) 内のすべてのインスタンスを記述し、その座標を入力フィーチャとして直接使用することです。これにより、単一のフィードフォワード パスで複数のターゲット エージェントの予測を行うことが可能になります [8、14]。ただし、グローバル座標を入力として使用すると、通常、単一のフィードフォワード パスで複数のターゲット エージェントに対して予測が行われます [8、14]。ただし、グローバル座標を入力として使用すると (広範囲にわたって変化することがよくあります)、タスク固有の複雑さが大幅に悪化し、その結果、ネットワーク パフォーマンスが低下し、新しいシナリオへの適応性が制限されます。精度と堅牢性を向上させるための一般的な解決策は、ターゲット エージェントの現在の状態に従ってシーン コンテキストを正規化することです [5、7、10] ~ [13] (エージェント中心)。これは、正規化プロセスと特徴エンコードをターゲット エージェントごとに繰り返し実行する必要があることを意味し、冗長な計算を犠牲にしてパフォーマンスの向上につながります。したがって、視点の変更に対する堅牢性を維持しながら、複数のオブジェクトの特徴を効果的にエンコードできる方法を検討する必要があります。 意思決定や動作計画などの動作予測の下流モジュールでは、将来の位置を考慮するだけでなく、機首方位、速度、その他の高次導関数も考慮する必要があります。たとえば、周囲の車両の予測される方位は、将来の時空占有を形成する上で重要な役割を果たし、これは安全で堅牢な動作計画を確保するための重要な要素です [15、16]。さらに、物理的制約に従わずに高次の量を独立して予測すると、一貫性のない予測結果が生じる可能性があります [17、18]。たとえば、速度がゼロであっても、計画モジュールを混乱させる位置ずれが生じる可能性があります。 この記事では、自動運転システムにおけるマルチエージェント軌道予測の重要な問題を解決するための SIMPL (Simple and Efficient Motion Prediction Baseline) と呼ばれる手法を紹介します。この方法では、まずインスタンス中心のシーン表現を採用し、次に対称融合トランスフォーマー (SFT) テクノロジーを導入します。これにより、視点不変性に対する精度と堅牢性を維持しながら、単一のフィードフォワード パスですべてのエージェントの軌道を効果的に予測できます。対称コンテキスト融合に基づく他の方法と比較して、SFT はよりシンプルで軽量で実装が容易であるため、車両環境への導入に適しています。 第 2 に、この論文では、バーンスタイン基底多項式 (ベジェ曲線としても知られる) に基づく予測軌道の新しいパラメーター化方法を紹介します。この連続表現により滑らかさが保証され、任意の時点での正確な状態とその高次導関数の簡単な評価が可能になります。この論文の実証研究は、ベジェ曲線の制御点を予測する学習の方が、単項基底多項式の係数を推定するより効率的で数値的に安定していることを示しています。最後に、提案されたコンポーネントはシンプルで効率的なモデルにうまく統合されています。この論文では、提案された方法を 2 つの大規模な動き予測データセット [22、23] で評価し、実験結果は、簡素化された設計にもかかわらず、SIMPL が他の最先端の方法と依然として高い競争力を持っていることを示しています。さらに重要なのは、SIMPL により、量子化パフォーマンスを犠牲にすることなく、より少ない学習可能なパラメータとより低い推論遅延で効率的なマルチエージェント軌道予測が可能になり、これは現実世界の航空機配備に有望です。このホワイト ペーパーでは、強力なベースラインとして、SIMPL が拡張性が高いことも強調しています。シンプルなアーキテクチャにより、最新の動き予測との直接統合が容易になり、全体的なパフォーマンスをさらに向上させる機会が提供されます。
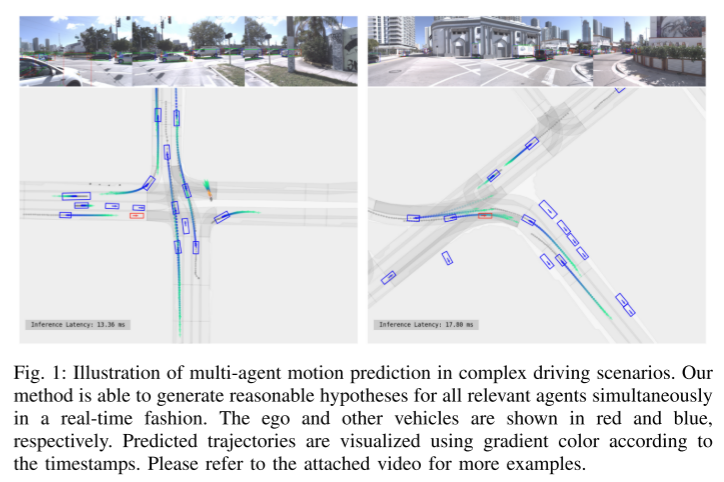
図 1: 複雑な運転シナリオにおけるマルチエージェントの動作予測の図。私たちのアプローチは、すべての関連エージェントに対して合理的な仮説をリアルタイムで同時に生成することができます。自車は赤、他車は青で表示されます。グラデーションカラーを使用して、タイムスタンプに基づいて予測された軌跡を視覚化します。その他の例については、添付のビデオを参照してください。
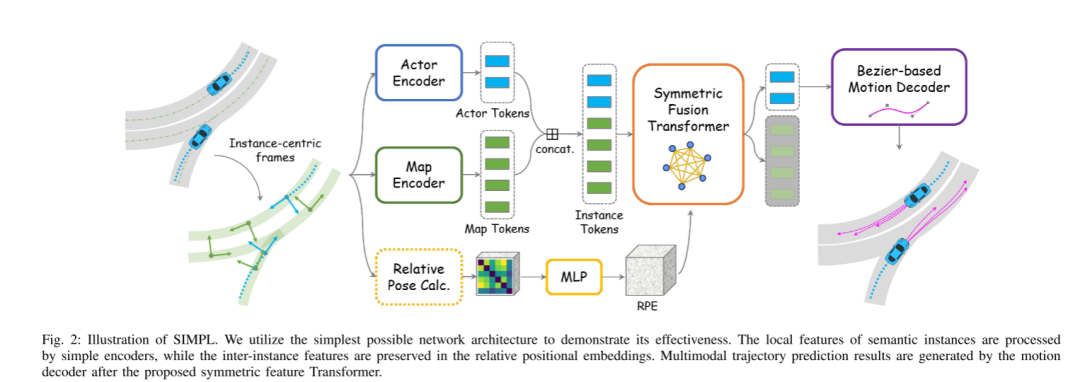
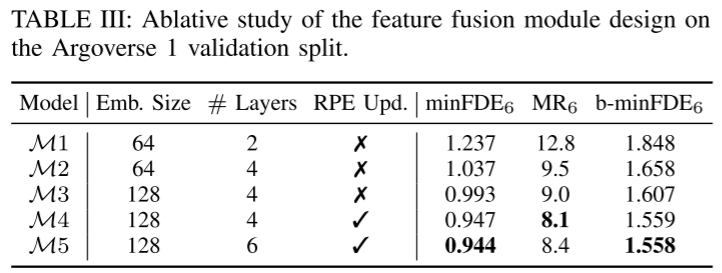
図 2: SIMPL の回路図。この記事では、可能な限り単純なネットワーク アーキテクチャを使用して、その有効性を示します。セマンティック インスタンスのローカルな特徴は単純なエンコーダーによって処理されますが、インスタンス間の特徴は相対位置の埋め込みに保存されます。マルチモーダル軌道予測結果は、提案された対称機能 Transformer の後のモーション デコーダーによって生成されます。
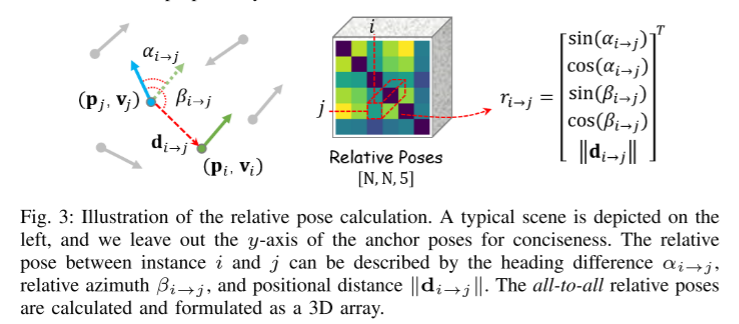
図 3: 相対姿勢計算の概略図。
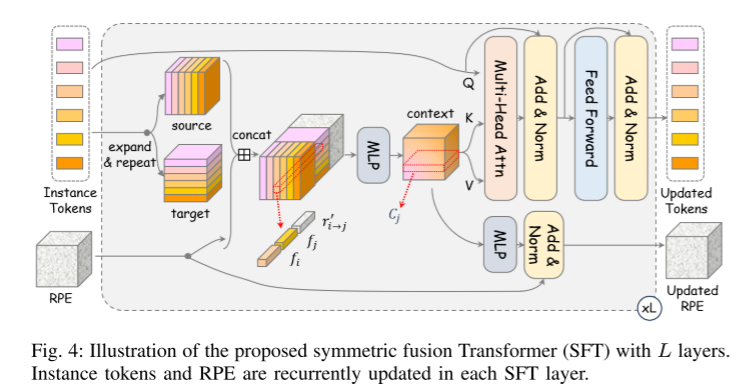
図 4: 提案された L 層対称融合変圧器 (SFT) の図。インスタンス トークンと相対位置埋め込み (RPE) は、各 SFT レイヤーで周期的に更新されます。
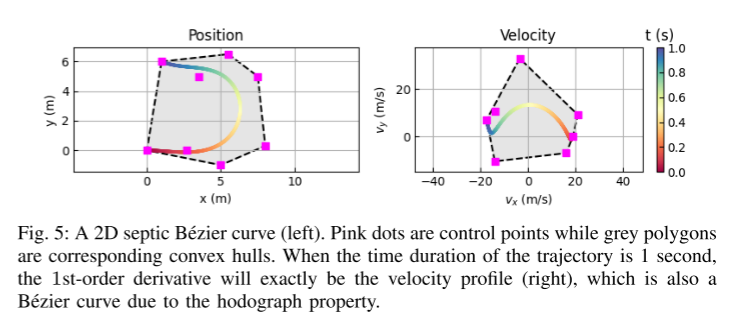
図 5: 2D 敗血症ベジェ曲線 (左)。 #########実験結果: ##################################### #
以上がSIMPL: 自動運転向けのシンプルで効率的なマルチエージェント動作予測ベンチマークの詳細内容です。詳細については、PHP 中国語 Web サイトの他の関連記事を参照してください。