
ホームページ >テクノロジー周辺機器 >AI >エンドツーエンド自動運転における軌道誘導の制御予測:シンプルかつ強力なベースライン手法 TCP
エンドツーエンド自動運転における軌道誘導の制御予測:シンプルかつ強力なベースライン手法 TCP

- WBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWB転載
- 2023-04-10 09:01:082174ブラウズ
arXiv 論文「エンドツーエンド自動運転のための軌道誘導制御予測: シンプルかつ強力なベースライン」、2022 年 6 月、上海 AI 研究所および上海交通大学。
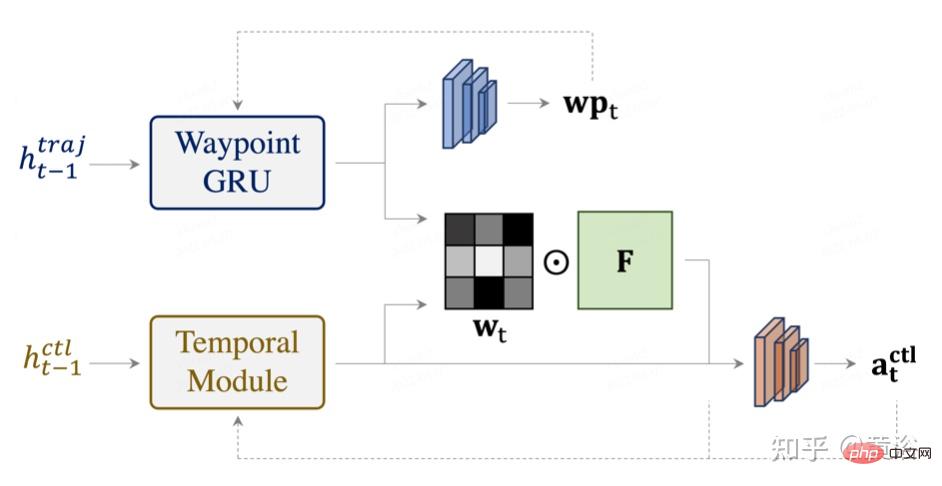
現在のエンドツーエンドの自動運転手法は、計画された軌道に基づいてコントローラーを実行するか、制御予測を直接実行します。これは 2 つの研究分野にまたがります。この 2 つの潜在的な相互利益を考慮して、この記事では、TCP (軌道誘導制御予測) と呼ばれる 2 つの組み合わせを積極的に検討します。具体的には、アンサンブル法には、軌道計画と直接制御の 2 つの分岐があります。軌道ブランチは将来の軌道を予測しますが、制御ブランチには現在のアクションと将来の状態の間の関係を推論する新しいマルチステップ予測スキームが含まれます。 2 つのブランチは、制御ブランチが各タイム ステップで軌道ブランチから対応するガイダンスを受け取るように接続されています。次に、2 つのブランチの出力が融合されて、相補的な利点が得られます。
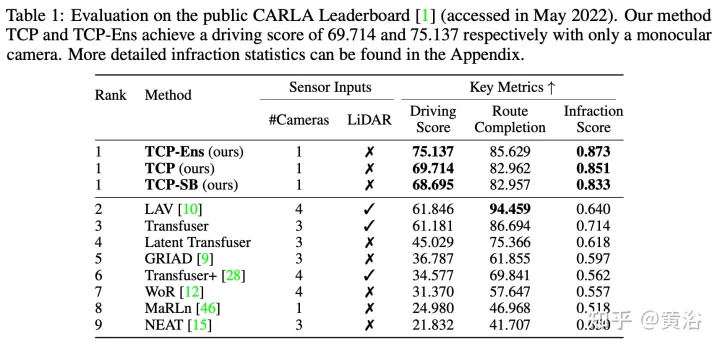
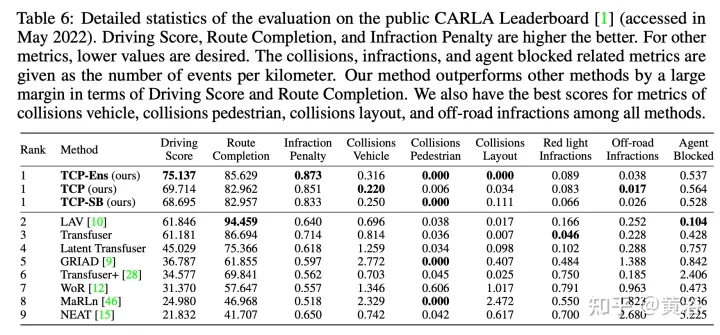
困難なシナリオを伴う閉ループ都市走行環境で Carla シミュレーターを使用した評価。単眼カメラ入力であっても、この方法は CARLA の公式ランキングで 1 位にランクされています。ソース コードとデータはオープン ソースになります: https://github.com/OpenPerceptionX/TCP
#専門家として Roach (「強化学習コーチを模倣したエンドツーエンドの都市運転 」。 ICCV、2021) を選択します。 Roach は、道路、車線、ルート、車両、歩行者、信号機、駅などの特権情報を使用して RL によってトレーニングされたシンプルなモデルであり、すべて 2D BEV 画像としてレンダリングされます。手作りのエキスパートと比較して、このような学習ベースのエキスパートは、直接の監視信号以外にもより多くの情報を伝えることができます。具体的には、特徴の損失があり、学生モデルの最終出力ヘッドの前の潜在特徴が専門家のものと同様になるように強制されます。期待収益を予測するためのスチューデント モデルの補助タスクとして、価値の損失も追加されます。
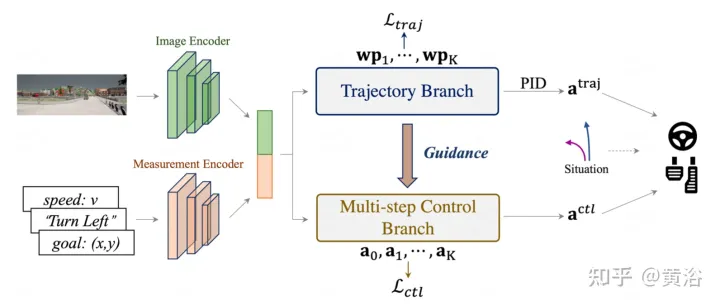
図に示すように、アーキテクチャ全体は、入力エンコード ステージと後続の 2 つのブランチで構成されます。入力画像 i は、ResNet などの CNN ベースの画像エンコーダを通過して、特徴マップ F を生成します。 。同時に、ナビゲーション情報 g が現在の速度 v と連結されて測定入力 m が形成され、MLP ベースの測定エンコーダーは m を入力として受け取り、測定特徴 jm を出力します。エンコード機能は、後続の 軌跡 および 制御 予測のために両方のブランチで共有されます。具体的には、Control Branch は、Trajectory Branch からのガイダンスを備えた新しいマルチステップ予測設計です。最後に、両方の出力パラダイムの長所を組み合わせるために、シナリオベースの融合スキームが採用されています。
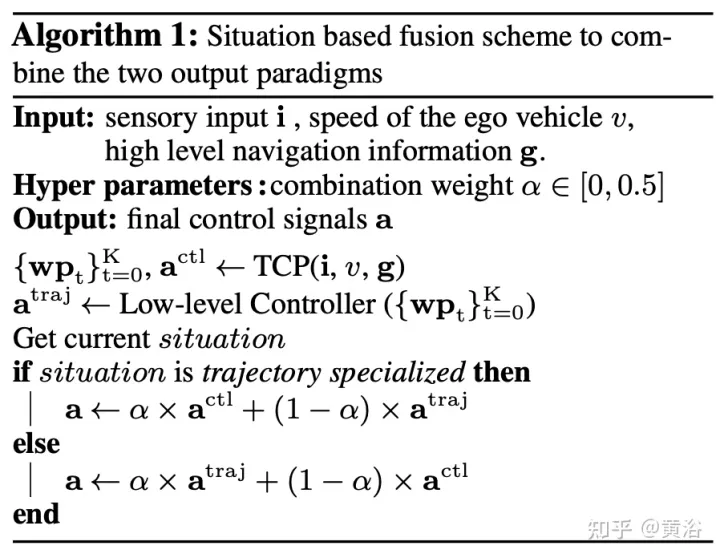
具体的には、α は 0 から 0.5 までの値を持つ結合された重みとして表されます。事前の信念によれば、場合によっては 1 つの表現の方が適切です。重み α を平均することで、軌道と制御の予測結果は次のようになります。を組み合わせると、より適切なものがより多くの重みを占めます (1 − α)。結合重み α は一定または対称である必要はなく、異なる状況や特定の制御信号に対して異なる値に設定できることを意味します。実験では、自車が旋回したかどうかに基づいてシーンが選択されました。つまり、旋回した場合、そのシーンは制御固有のものであり、そうでない場合は、軌道固有のものでした。
実験結果は次のとおりです:
以上がエンドツーエンド自動運転における軌道誘導の制御予測:シンプルかつ強力なベースライン手法 TCPの詳細内容です。詳細については、PHP 中国語 Web サイトの他の関連記事を参照してください。