
ホームページ >テクノロジー周辺機器 >AI >自動運転ポジションの包括的な紹介 - 史上最も完全な章
自動運転ポジションの包括的な紹介 - 史上最も完全な章

- 王林転載
- 2024-01-16 12:12:15562ブラウズ
1. 背景
最近、ハイテクが自動運転の分野にどのように移行するかを共有しているときに、数人の友人が私に同じ質問をしました。「L2 ~ L4 のポジションは何ですか?」 「自動運転って何?具体的にはどんな仕事内容に該当するの?どんなスキルが必要?」今日は誰もが知りたいこのテーマについてお話します。
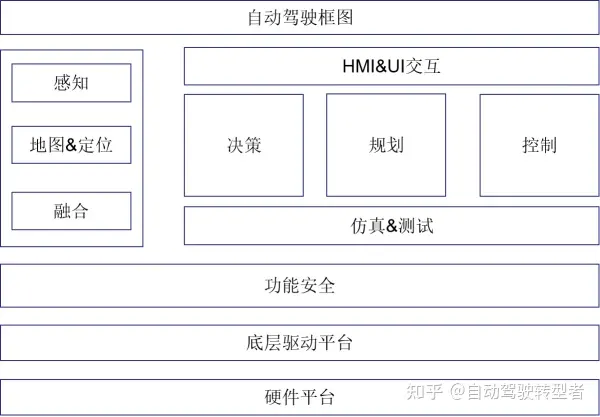
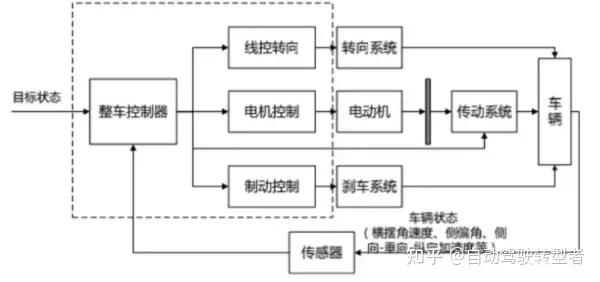
最初に、自動運転の全体概念を理解していただくために、自動運転のシステム構成図(簡易版)を紹介します。
- 次に、自動運転の概要を説明します。アルゴリズムエンジニアと非アルゴリズムエンジニアの2つに分けて紹介します。
- アルゴリズム エンジニア
- レーザー SLAM アルゴリズム エンジニア
- ビジュアル SLAM アルゴリズム エンジニア
- マルチセンサー フュージョンアルゴリズム エンジニア
- 機械学習アルゴリズム エンジニア
- コンピュータ ビジョン アルゴリズム エンジニア
- 自然言語処理アルゴリズム エンジニア
- 意思決定アルゴリズム エンジニア
- 計画アルゴリズムエンジニア
- 制御アルゴリズムエンジニア
- ノンアルゴリズムエンジニア
- ソフトウェアプラットフォーム開発エンジニア
- システムエンジニア
- 機能安全エンジニア
- キャリブレーションエンジニア
- シミュレーション環境エンジニア
- テストエンジニア
- データエンジニア
- UI 開発エンジニア
- 各ポジションの職務責任と学ぶべきことについて詳しく説明します
2.アルゴリズムエンジニア
2.1. レーザーSLAMアルゴリズムエンジニア
- ポジション紹介: レーザーセンサーデータを収集し、点群データに基づいて自動運転車の周囲環境の地図を構築します。
- レーザー センサーに基づく SLAM アルゴリズムの設計と開発を担当します。SLAM アルゴリズムは、さまざまな複雑なシーンをカバーする高精度マップを更新および生成できます。
- スキル要件: C、C プログラミングを使用する;
- フィルタリング アルゴリズムの知識が必要: ESKF、EKF、UKF など;
- 同時に、非線形誤差関数の最適化に使用される G2O、ceres、およびその他の C フレームワークを学習する必要があります。
- GLoam、kimera、VINS などのオープンソース SLAM フレームワークに精通していることが望ましい;
2.2. ビジュアル SLAM アルゴリズム エンジニア

- 仕事紹介: VSLAM に基づいて、ライダー、ジャイロスコープ、オドメーター、情報融合、ロボット動作モデルの構築
- スキル要件: ORB-SLAM、SVO、DSO、MonoSLAM など、一般的に使用される VSLAM アルゴリズムを学習します。 VINS や RGB-D など;
- ROS ロボット オペレーティング システム;
- フィルタリング アルゴリズムの知識が必要: ESKF、EKF、UKF など;
- 同時に、誤差関数の非線形 C フレームワークを最適化するには、G2O、ceres などを学習する必要があります。
2.3. マルチセンサー フュージョン アルゴリズム エンジニア
- ポジションの紹介:
- カメラ、ライダー、ミリ波レーダーなどの複数のセンサーからの情報を処理および統合して、自動運転車の環境認識能力を向上させます。
- マルチソース情報融合に基づいてターゲットの検出、追跡、識別、測位を担当します。
- マルチソース情報融合に基づいて環境特徴抽出を担当し、地図構築をサポートします。ナビゲーションと測位のサポート。
- スキル要件:
- カメラ、ミリ波レーダー、ライダー、慣性航法、その他の関連データ分析および融合アルゴリズムに関連するデータ分析および融合アルゴリズムをマスターします。
- コンピュータ情報科学、電子工学または数学関連専攻の学士号以上、確実なコンピュータ理論の基礎がある
- 高精度カメラ モデル、マルチビジョン幾何学、バンドル調整原理、SfM の経験、幾何学測距およびその他のプロジェクト
- C/Cに熟練し、Matlabに精通し、オブジェクト指向プログラミングのアイデアとコーディングの習慣に精通している
- IMU、GPS、DR、およびその他の慣性航法測位アルゴリズムのフレームワークに精通している
- IMU、GPS、人体システムの原理、ハードウェア特性、キャリブレーション アルゴリズムに精通している
2.4. 機械学習アルゴリズム エンジニア
- 仕事紹介:
- このディレクションは主に車両走行中に生成されるデータのエンジニアリング応用を担当し、車両走行距離の影響分析、ビッグデータ分析モデリングなどのデータ分析に偏っています。 、など。
- スキル要件:
- Python、C/C
- LR、GBDT、SVM、DNN、などの機械学習の基本的な理論アルゴリズムを学習します。など;
- scikit-learn などの従来の機械学習フレームワークのモデル トレーニングを学習する;
- PyTorch や TensorFlow (ニューラル ネットワーク部分の一部) などの深層学習フレームワークに精通する。
#2.5. コンピュータ ビジョン アルゴリズム エンジニア
- #仕事紹介: この方向性は主にカメラ センサーに基づいており、これには主に車線境界線の検出、車両およびその他の障害物の検出、走行可能領域の検出、信号機などの交通情報の検出などが含まれます。
- スキル要件: C/C、Python、OpenCV;
- 機械学習の基本的なアルゴリズムが必要です (次元削減、分類、回帰など) .) ;
- ディープ ラーニングとディープ ラーニング フレームワークを学習する必要があります;
- コンピューター ビジョンと画像処理の一般的な方法 (オブジェクトの検出、追跡、セグメンテーション、分類と認識など) を学習します。
2.6. 自然言語処理アルゴリズム エンジニア
- ポジション紹介: この方向性は主に車両シナリオでの音声認識、音声インタラクション設計などを担当します。
- スキル要件: 機械学習アルゴリズム、深層学習アルゴリズム (RNN) を学習します;
- 自然言語処理の基本タスク (単語分割、品詞タグ付け、構文解析、キーワード抽出)
- クラスタリング、分類、回帰、並べ替え、分析などの機械学習手法を使用する必要があります。テキスト ビジネスの問題を解決するための他のモデル;
- PyTorch、TensorFlow (部分的に RNN 部分) などの深層学習フレームワークに精通している。

- #求人紹介:
- 自動運転の意思決定は、運転目標を達成するために、認識モジュールによって送信された情報を車両の動作に変換することです。たとえば、車の加速、減速、左折、右折、車線変更、追い越しはすべて意思決定モジュールの出力です。意思決定には、乗客の安全を確保し、できるだけ早く目的地に到着するために、車の安全性と快適性を考慮する必要があります。
- スキル要件:
- c/c/python、ROS システムに精通している;
- 一般的に使用される意思決定アルゴリズムを学習します。ステート マシンと意思決定ツリー、マルコフ意思決定プロセス、POMDP などの作成;
- 深く学びたい場合は、機械学習アルゴリズム (RNN、LSTM、RL) に精通し、少なくともマスターする必要があります。 1 つの深層学習フレームワーク (ジムやユニバースなど)、強化学習プラットフォーム);
- 車両の運動学および力学モデルに精通していること。
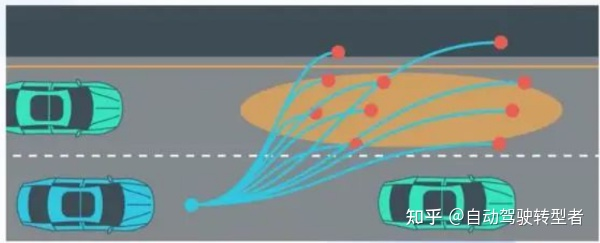
- ポジションの紹介:
- 計画には経路計画と速度計画が含まれます
- 計画アルゴリズムでは、自動運転車はまず車両が走行できる経路を決定します。経路計画経路を移動し、経路を選択して移動できる速度を決定します。
- スキル要件:
- c/c/python、ROS ロボット オペレーティング システム (一部の企業は Matlab/simulink を使用して開発しています)
- 学習共通パスA、D、RRT などの計画アルゴリズム;
- 5 次曲線、クロソイド、3 次スプライン、B スプライン曲線などのいくつかの曲線表現方法を学習します;
- さらに深く学びたい場合は、MDP、POMDP、Came Theory などの軌道予測アルゴリズムを学習してください。
- RNN、LSTM、 Deep Q-Learning など;
- 数学的な理論的基礎と背景を持ち、車両の運動学および力学モデルに精通している。
2.9. 制御アルゴリズムエンジニア
- 崗位介紹:
- 一般是對車輛橫縱向動力學建模,然後開發控制演算法,實現車輛運動控制等;
- 這個崗位跟車輛打交道較多,對於傳統車廠轉型到自動駕駛領域的夥伴來說,是個很好的切入機會。
- 技能需求:
- C/C 、Matlab/Simulink
- 學習自動控制理論基礎,學習現代控制理論;
- 學習PID、LQR、MPC演算法;
- 學習車輛運動學、動力學模型,對汽車的底盤有一定了解;
- 學習CarSim等模擬軟體;
- #學習ACC、AEB、APA、LKA、LCC等輔助駕駛功能開發的是加分項;
- 擁有實車調試經驗也是加分項。
3.非演算法類別工程師
3.1.軟體平台開發工程師
- 職位介紹:
- 設計和實現自動駕駛軟體平台,包括核心修改/擴展、驅動程式實現/增強、中間件實現/增強、系統整合、效能/功耗最佳化、壓力/穩定性/符合性測試;
- 負責建構系統架構、編寫底層驅動程式;
- 負責視覺相關演算法在嵌入式處理器(GPU、DSP、ARM等平台)上的程式碼實現及效能最佳化、測試和維護;
- 協助演算法工程師完成演算法在嵌入平台上的移植、整合、測試和最佳化。
- 技能需求:
- C/C 程式設計技巧、Python;
- 具有嵌入式作業系統和即時作業系統的核心或驅動開發經驗,熟悉QNX、ROS;
- 熟悉軟體調試和debug工具;
- 了解車輛ADAS ECU和感測器,如雷達、攝影機、超音波和雷射雷達;
- 熟悉通用診斷服務(UDS)、控制器區域網路(CAN);
- 熟悉通訊協定(CAN、UDS、DoIP、SOME/IP、DDS、MQTT、REST等)是加分項。
3.2.系統工程師
- #職位介紹:
- 負責客戶需求對接,以及與內部開發人員的需求釋放;
- 負責無人駕駛軟體系統框架建置;
- 負責模組化、可驗證的系統軟體架構設計和即時效能最佳化;
- 與硬體、演算法和測試團隊合作,整合並優化自動駕駛系統。
- 技能需求:
- 擁有紮實的電腦基礎理論知識(如:自動控制、模式辨識、機器學習、電腦視覺、點雲處理);
- 具有嵌入式作業系統和即時作業系統的核心或驅動開發經驗;
- 具備良好的溝通表達能力和團隊合作意識
3.3 .功能安全工程師
- 職位介紹:
- 在產品全生命週期內對產品的功能安全進行支援
- 負責無人/自動駕駛系統產品的功能安全系統設計,並對現有流程提出改進意見;
- 負責無人/自動駕駛系統的危險分析(HARA, FMEAs, FMEDA, FTA);
- 負責無人/自動駕駛系統的安全目標定義;
- 負責無人/自動駕駛系統的安全需求定義;
- 技能要求:
- 精通ISO26262並有自動駕駛或ADAS系統功能安全專案實施經驗;(在傳統車廠做功能安全想要轉行的也可以考慮);
- 了解FMEA,FMEDA,FMEA- MSR,FTA等對應的方法;
3.4標定工程師
- 職位介紹:
- 負責自動駕駛多感測器標定,包括GPS、IMU、LiDAR、Camera、Radar 和USS 等;
- 設計實現感測器內參外參標定演算法,建構多感測器標定係統;
- #負責對標定參數進行相關車輛測試,給予測試報告。
- 技能需求:
- C 程式設計, 熟悉Linux及ROS系統;
- 有感測器標定工作經歷,熟悉視覺或雷射SLAM 演算法;
3.5模擬環境工程師
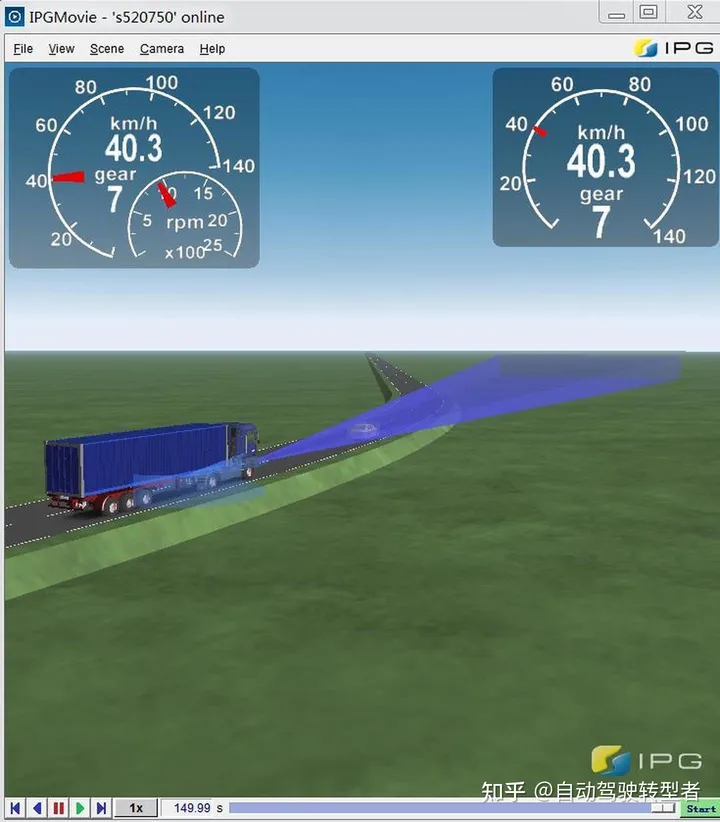
- 崗位介紹:
- 此方向需要參與自動駕駛相關仿真係統的搭建,包括車輛動力學相關仿真,各類虛擬感測器模型及虛擬場景的建模與仿真,根據測試案例建立測試場景,執行自動駕駛演算法模擬測試等等;
- 負責搭建無人駕駛模擬系統,對汽車、感測器、環境進行軟體模擬。模擬結果將與真實數據一同用於預測汽車在真實場景中的行為;
- 配合駕駛決策、路徑規劃、仿真演算法等模組,實現自動駕駛閉環仿真,並視覺化相關調試資訊。
- 技能需求:
- MATLAB/simulink、Python/C
- 熟練操作一種常用車輛動力學或無人車相關模擬軟體,例如Perscan、Carsim、Carmaker等;
- 熟悉機器人作業系統ROS等;
- 有的模擬職位純粹屬於做仿真,但有的崗位需要做仿真環境的開發,這樣的崗位對程式設計要求會更高一些。
3.6測試工程師
- 名單介紹:
- 此方向主要負責自動駕駛車輛的相關測試工作,測試自動駕駛系統功能各項指標的性能,評估其邊界條件與失效模式;
- 負責自動化測試(SIL、HIL)的設計實現及智慧駕駛產品的相關驗證;
- 負責根據系統或產品的功能需求制定測試案例和測試計劃;
- 負責制定完整的系統或產品的測試計劃並實施,最後撰寫測試報告;
- #收集和測試系統的邊界範例,對智慧駕駛系統的安全性進行評估,對技術提出合理的回饋。
- 技能需求:
- 熟悉Ubuntu/Linux作業系統,會寫python腳本
- 熟悉CAN匯流排; ##熟悉測試用例的編寫方法和技巧;
- 熟悉圖像識別演算法,熟悉深度學習,掌握spark等大數據相關工具者加分;
- #熟悉雷射雷達,毫米波雷達,超音波探頭和攝影機的應用是加分項。
3.7大數據開發工程師
- #職位介紹:##資料包含後台資料架構和前台呈現。一輛自動駕駛車每天都要產生1個T的資料量。資料該如何快速清洗、提煉、總結,例如如何迅速找出一次路測中最重要的幾次介入(disengagements)。從而更有效率的幫助工程師測試。
- 負責自動駕駛大數據平台系統的設計、開發與最佳化;
- 負責自動駕駛資料標註與處理流程的視覺化工具開發,自動化標註平台的設計與研發。
- 技能需求:
- 具備紮實的資料結構及演算法功底;
- 精通Java/Python/C 等至少一門高階程式語言;
- 熟悉Linux開發環境;
- 有基於SQL或No-SQL資料庫的應用程式的設計、開發經驗;
- 熟悉REST服務及Web標準,熟悉一種主流前端開發框架,如React/AngularJS,能獨立建構前端應用者加分;
- 熟悉自動駕駛及相關的Lidar、Camera等感測器資料者加分。
- #職位介紹:
- 每個公司都需要建立內部工具,用於驗證整車開發。也需要給遠端控制中心做各種互動頁面,透過一個UI遠端控制自動駕駛汽車。同時也包括車廂內為乘客準備的UI。喜歡設計或擅長前端的朋友可以考慮。
- 技能需求:
- 具有優秀的美感和豐富的視覺表現力;
- 精通色彩、圖形、資訊和GUI設計原則及方法。
最後,國家政策正在大力推廣新能源智慧化汽車,希望越來越多的伙伴一起加入到自動駕駛行業。
 原文連結:https://mp.weixin.qq.com/s/d41a5VYtJ4lvMP3GO6In_g
原文連結:https://mp.weixin.qq.com/s/d41a5VYtJ4lvMP3GO6In_g
以上が自動運転ポジションの包括的な紹介 - 史上最も完全な章の詳細内容です。詳細については、PHP 中国語 Web サイトの他の関連記事を参照してください。
Python Java matlab sql 架构 中间件 面向对象 数据结构 对象 算法 spark 数据库 opencv tensorflow rnn lstm dnn pytorch 数据分析 https 传感器 linux ubuntu 性能优化 ui 自动化 系统架构
声明:
この記事は51cto.comで複製されています。侵害がある場合は、admin@php.cn までご連絡ください。