
ホームページ >テクノロジー周辺機器 >AI >Leju人型ロボット「Kuafu」がOpenHarmony 3.2互換性検証に合格
Leju人型ロボット「Kuafu」がOpenHarmony 3.2互換性検証に合格

- WBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWB転載
- 2024-01-11 18:33:04883ブラウズ
OpenHarmony の公式公開アカウントによると、本日、Leju の「Kuafu」ロボットが OpenHarmony 3.2 リリース バージョンの互換性評価に合格したと発表されました。
報道によると、Kuafu ロボットは深セン開虹連合楽樹ロボット技術有限公司 (略称「楽樹」) が共同開発したもので、「ジャンプして歩行に適応する能力を備えた初の国産ロボット」と呼ばれています。さまざまな地形「オープンソースのHongmeng 人型ロボット」
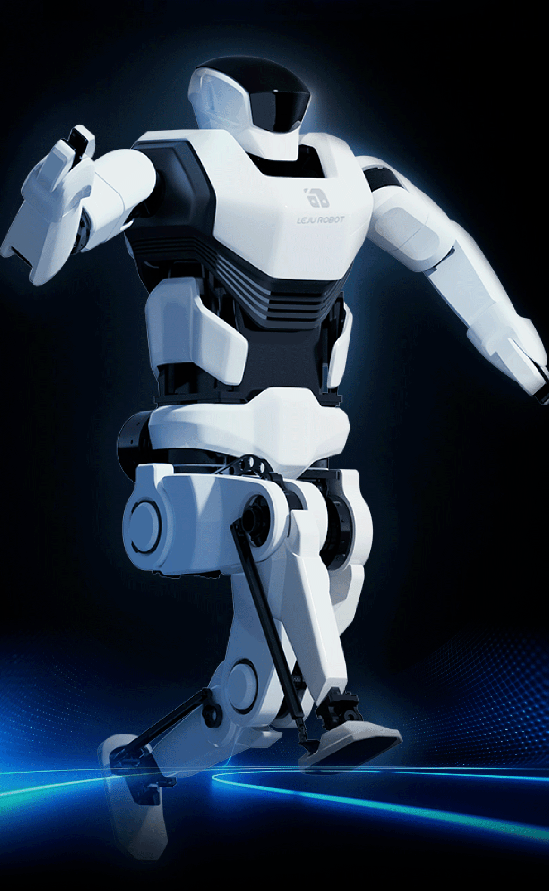
▲ 画像出典 Leju公式サイト(以下同)
IT Home はニュースで、このロボットには、オープンソースのHongmeng に基づいて深セン開虹が開発した KaihongOS オペレーティング システムが搭載されており、フルスタックのオープンソース設計が採用されており、モーション コントローラーは完全にオープンソースであることを知りました。このロボットは、軌道計画、フィードバック制御、状態推定などのモジュールに接続でき、その歩行アルゴリズムは、砂、草、障害物などのさまざまな地形に適応でき、最大 20 センチメートルジャンプできると主張しています
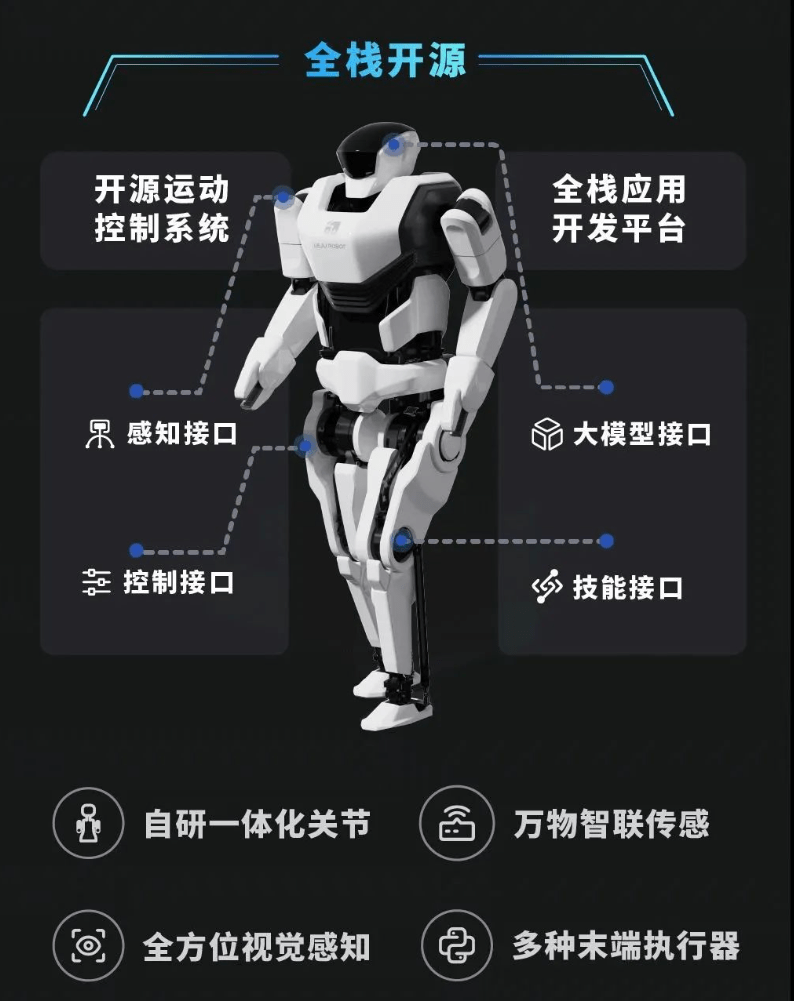
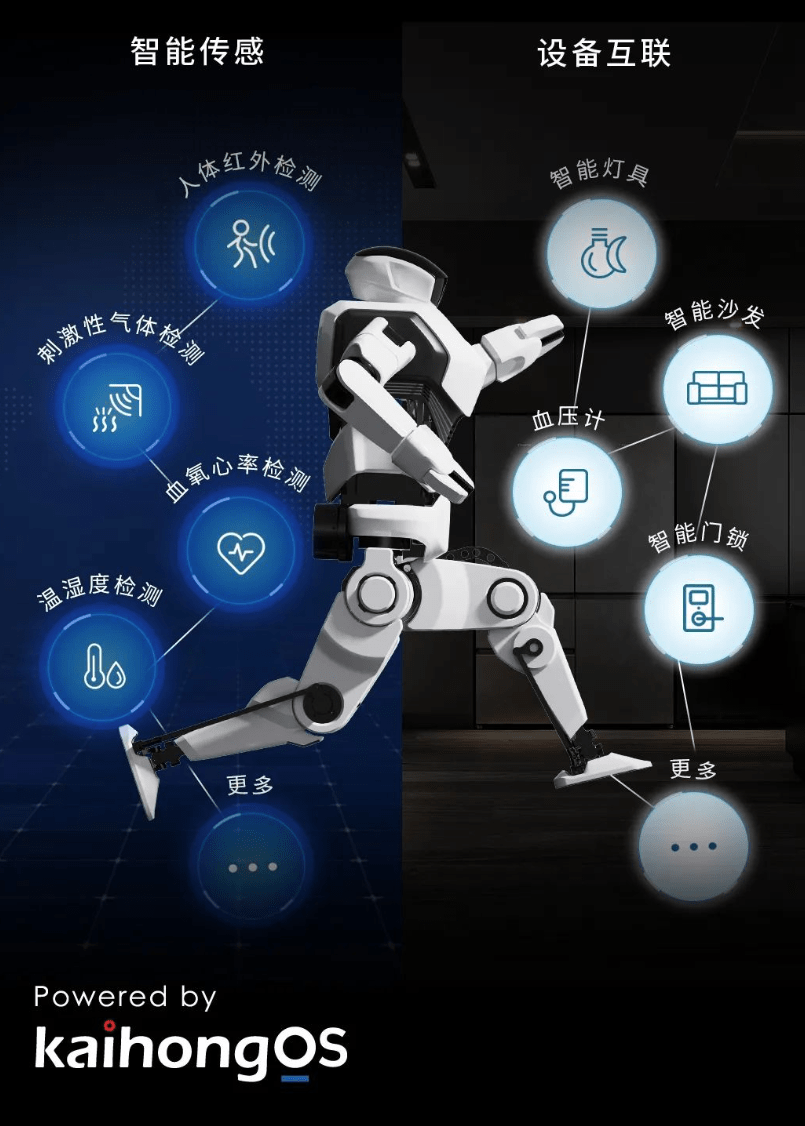
知覚の面では、このロボットにはさまざまな Kaihong センサーを装備することができ、深度カメラも装備されています。二次開発用のさまざまなエンドアクセサリと併用することもでき、主流の大型モデルと接続することもできます。
以上がLeju人型ロボット「Kuafu」がOpenHarmony 3.2互換性検証に合格の詳細内容です。詳細については、PHP 中国語 Web サイトの他の関連記事を参照してください。