
ホームページ >テクノロジー周辺機器 >AI >DetZero: Waymo は 3D 検出リストで 1 位にランクされており、手動アノテーションに匹敵します。
DetZero: Waymo は 3D 検出リストで 1 位にランクされており、手動アノテーションに匹敵します。

- WBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWB転載
- 2023-12-04 11:33:52951ブラウズ
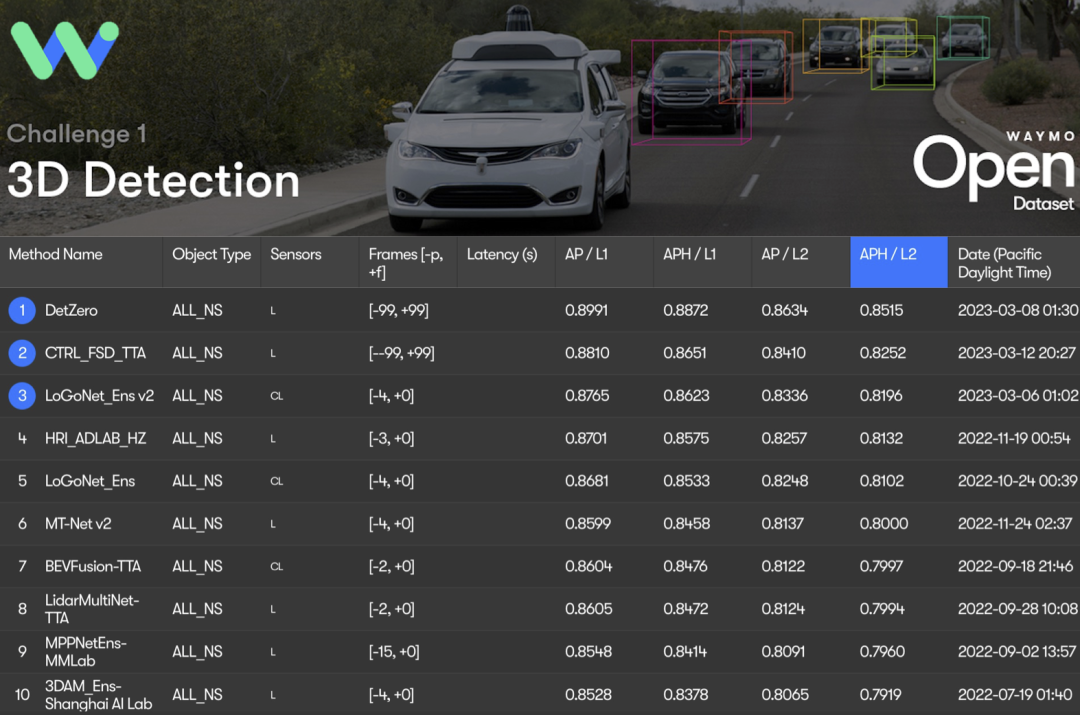
この記事では、オフライン 3D オブジェクト検出アルゴリズム フレームワーク DetZero のセットを提案します。Waymo の公開データセットの包括的な調査と評価を通じて、DetZero は連続的で完全なオブジェクトを生成できます。 、長期点群機能を最大限に活用して、知覚結果の品質を大幅に向上させます。同時に、85.15 mAPH (L2) の性能で WOD 3D 物体検出ランキングで 1 位にランクされました。さらに、DetZero はオンライン モデル トレーニングに高品質の自動ラベル付けを提供でき、その結果は手動ラベル付けのレベルに達するか、それを超えています。
これは論文のリンクです: https://arxiv.org/abs/2306.06023
書き直す必要がある内容は次のとおりです: コードのリンク: https://github.com/PJLab -ADG/ DetZero
ホームページのリンクにアクセスしてください: https://superkoma.github.io/detzero-page
1 はじめに
データアノテーションの効率を向上させるために、私たちは新しいアプローチを検討しました。この手法は深層学習と教師なし学習に基づいており、アノテーション付きデータを自動的に生成できます。大量のラベルなしデータを使用することで、道路上の物体を認識および検出する自動運転知覚モデルをトレーニングできます。この方法により、データのラベル付けコストを削減できるだけでなく、後処理の効率も向上します。実験では比較のためのベースラインとして Waymo のオフライン 3D オブジェクト検出手法 3DAL[] を使用しました。結果は、提案した手法の精度と効率が大幅に向上していることを示しています。この手法は将来の自動運転技術において重要な役割を果たすと考えています。
- 物体検出 (Detection): 少量の連続点群フレーム データを入力し、各フレームを出力します。 ;
- 動作分類動作分類) における 3D オブジェクトの境界ボックスとカテゴリ情報: オブジェクトの軌道特性に基づいて、オブジェクトの動作状態 (静止または移動) を決定します;
- オブジェクト中心の最適化 (オブジェクト中心のリファイニング): 前のモジュールによって予測された運動状態に基づいて、静止オブジェクトと移動オブジェクトの時間点群特徴がそれぞれ抽出され、正確な境界ボックスを予測します。最後に、最適化された 3D バウンディング ボックスは、ポーズ マトリックスを通じてオブジェクトが配置されている各フレームの座標系に戻されます。
- ただし、多くの主流のオンライン 3D オブジェクト検出方法は、点群の時間コンテキスト機能を利用することで、既存のオフライン 3D 検出方法よりも優れた結果を達成しています。ただし、これらの方法では、長いシーケンス点群の特性を効果的に利用できないことを認識しています。
- オブジェクト シーケンスの品質は、下流の最適化モデルに大きな影響を与えます
運動状態分類に基づく最適化モデルは、オブジェクトの特徴のタイミング。たとえば、剛体オブジェクトのサイズは時間が経過しても一定であり、さまざまな角度からデータをキャプチャすることでより正確なサイズ推定を達成できます。オブジェクトの運動軌跡は特定の運動学的制約に従う必要があり、これは軌跡の滑らかさに反映されます。 。以下の図 (a) に示すように、動的オブジェクトの場合、スライディング ウィンドウに基づく最適化メカニズムはオブジェクト ジオメトリの一貫性を考慮せず、複数の隣接するフレームの時系列点群情報を通じて境界ボックスを更新するだけです。予測された幾何学的サイズにずれが発生します。 (b) の例では、オブジェクトのすべての点群を集約することで、密な時系列点群特徴が得られ、バウンディング ボックスの正確な幾何学的サイズをフレームごとに予測できます。 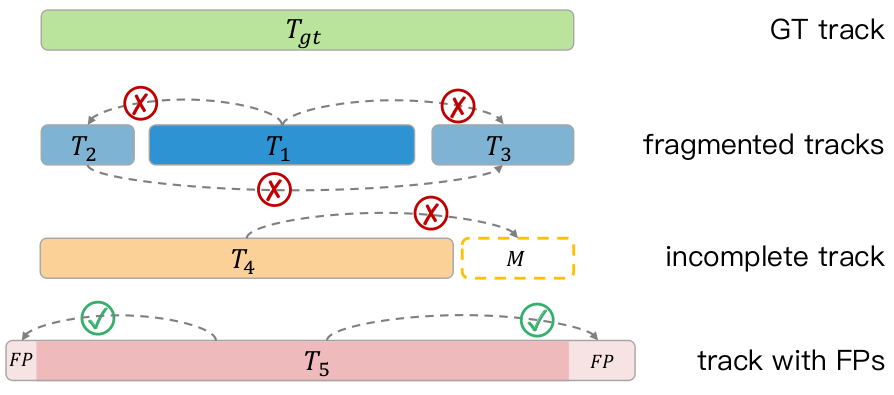
- 運動状態に基づく最適化モデルはオブジェクトのサイズを予測し (a)、幾何最適化モデルはさまざまな視点からすべての点群を集約した後にオブジェクトのサイズを予測します ( b)
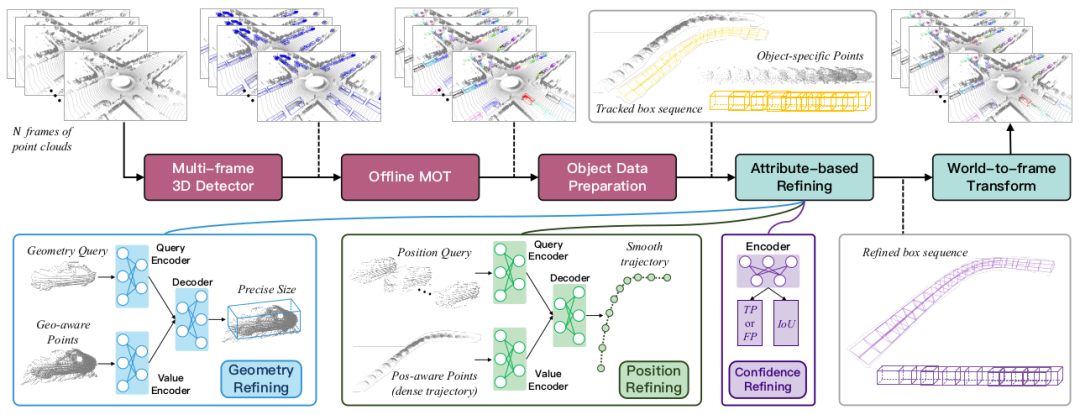
- ローカル位置とグローバル位置の間の相互作用: オブジェクト シーケンス内の任意のボックスを原点としてランダムに選択し、他のすべてのボックスと対応するオブジェクト点群をこの座標系に転送し、各点とそれぞれの境界までの距離を計算します。フレームの中心点と 8 つの隅の点は、グローバル位置特徴のキーと値として機能します。オブジェクト シーケンス内の各サンプルは位置クエリとして使用され、現在の位置と他の位置の間の相対距離を決定するためにセルフ アテンション レイヤーに送信され、その後、クロス アテンション レイヤーに入力されて、コンテキスト関係をシミュレートします。ローカル位置からグローバル位置に変換し、この座標系を予測します。各初期中心点と真の中心点の間のオフセット、および機首角の差。
- 信頼の最適化: 分類ブランチは、オブジェクトが TP か FP かを分類するために使用されます。IoU 回帰ブランチは、幾何学的モデルと位置モデルによって最適化された後、オブジェクトとグラウンド トゥルース ボックスの間の IoU サイズを予測します。 。最終的な信頼スコアは、これら 2 つの分岐の幾何平均です。
2 方法
この論文では、DetZero と呼ばれる新しいオフライン 3D オブジェクト検出アルゴリズム フレームワークを提案します。このフレームワークには次の特徴があります: (1) マルチフレーム 3D 検出器とオフライン トラッカーを上流モジュールとして使用し、オブジェクト シーケンスの高い再現率 (トラック レベルの再現率) に焦点を当て、正確かつ完全なオブジェクト追跡を提供します。(2) 下流モジュールアテンション メカニズムに基づく最適化モデルが含まれており、長期的な点群特徴を使用して、洗練された幾何学的寸法、スムーズなモーション軌跡の位置、更新された信頼スコアなど、オブジェクトのさまざまな属性を学習および予測します。
2.1 完全なオブジェクト シーケンスの生成
##基本的な検出器としてパブリック CenterPoint[] を使用します。より多くの検出候補フレームを提供するために、3 つの側面で作業を進めます。強化: (1) 異なるフレームの点群の組み合わせを入力として使用し、パフォーマンスを低下させることなくパフォーマンスを最大化します; (2) 点群密度情報を使用して、元の点群の特徴とボクセルの特徴を 2 段階のモジュールに融合し、第 1 段階の境界結果を最適化します。 ; (3) 推論段階のデータ拡張 (TTA)、マルチモデル結果融合 (アンサンブル)、およびその他のテクノロジーを使用して、複雑な環境へのモデルの適応性を向上させますオフライン追跡では 2 段階の相関戦略が導入されています。モジュール 誤ったマッチングを減らすために、ボックスは信頼度に応じて高グループと低グループに分割され、高グループは既存の軌跡を更新するために関連付けられ、更新されていない軌跡は低グループに関連付けられます。同時に、オブジェクトの軌跡の長さはシーケンスの終わりまで続くことができるため、ID 切り替えの問題が回避されます。さらに、追跡アルゴリズムを逆に実行して、別の軌跡のセットを生成し、位置の類似性によってそれらを関連付け、最後に WBF 戦略を使用して、正常に一致した軌跡を融合して、シーケンスの最初と最後の整合性をさらに向上させます。最後に、微分されたオブジェクト シーケンスについては、各フレームの対応する点群が抽出されて保存され、更新されていない冗長ボックスといくつかの短いシーケンスは、ダウンストリームの最適化なしで最終出力に直接マージされます。2.2 属性予測に基づくオブジェクト最適化モジュール
以前のオブジェクト中心の最適化モデルは、幾何学的形状の一貫性や一貫性など、異なる運動状態にあるオブジェクト間の相関関係を無視していました。隣接する瞬間における物体の運動状態の変化。これらの観察に基づいて、従来のバウンディング ボックス回帰タスクを 3 つのモジュールに分解します。 オブジェクトの形状、位置、信頼度の属性をそれぞれ予測します。- #マルチビューの幾何学的相互作用: 複数のビューをステッチすることによるオブジェクト点群オブジェクトの外観と形状を完成させることができます。まず、ローカル座標変換を実行して、オブジェクト点群をさまざまな位置のローカル フレームに位置合わせし、各点の境界ボックスの 6 つの表面への投影距離を計算して、境界ボックスの情報表現を強化します。異なるフレームのすべての点群をマージします。 マルチビューの幾何学的特徴のキーと値として、t 個のサンプルが単一ビューの幾何学的特徴のクエリとしてオブジェクト シーケンスからランダムに選択されます。幾何学的クエリは自己注意レイヤーに送信されて互いの違いが確認され、次に相互注意レイヤーに送信されて必要なパースペクティブの特徴を補完し、正確な幾何学的サイズを予測します。
3 実験
3.1 主なパフォーマンス
DetZero は 85.15 mAPH (L2) を達成し、最高の結果を達成しました。 DetZero は、長期点群を処理する方法と比較しても、最先端のマルチモーダル フュージョン 3D 検出器と比較しても、パフォーマンスに大きな利点があることを示しました。Waymo 3D 検出ランキング結果は、すべての結果で使用されています。 TTA またはアンサンブル テクノロジー、† はオフライン モデルを指します、‡ は点群画像融合モデルを指します、* は匿名の提出結果を示します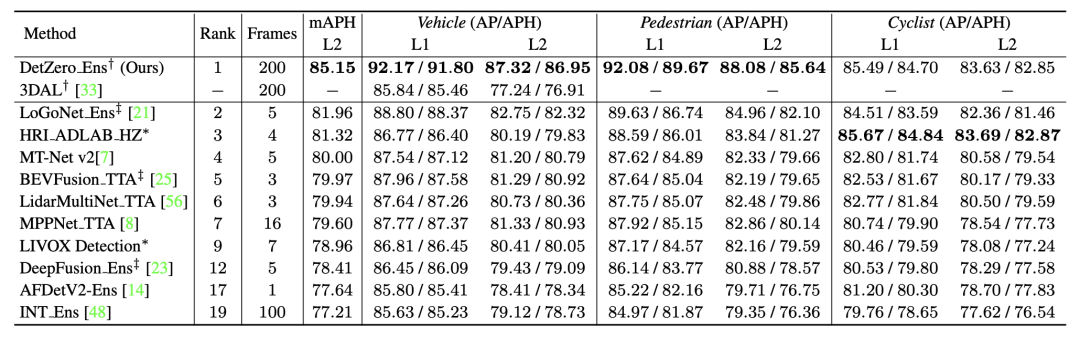
Waymo 3D 追跡ランキング、* 結果の匿名送信を示します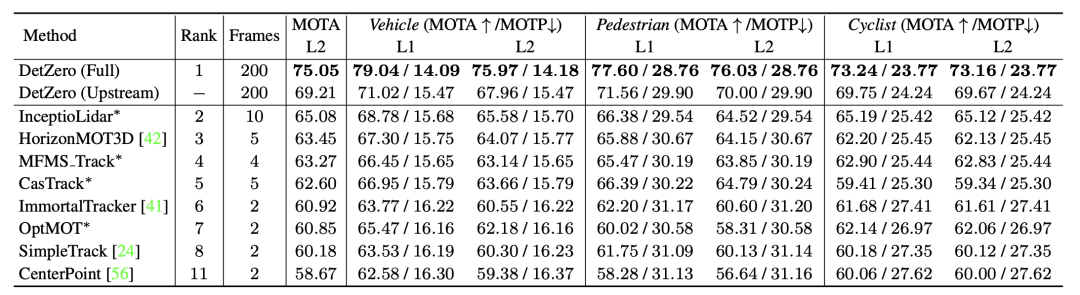
3.2 アブレーション実験
提案した各モジュールの役割をより適切に検証するために、Waymo 検証セットでアブレーション実験を実施し、より厳しい IoU しきい値を採用しました。測定基準
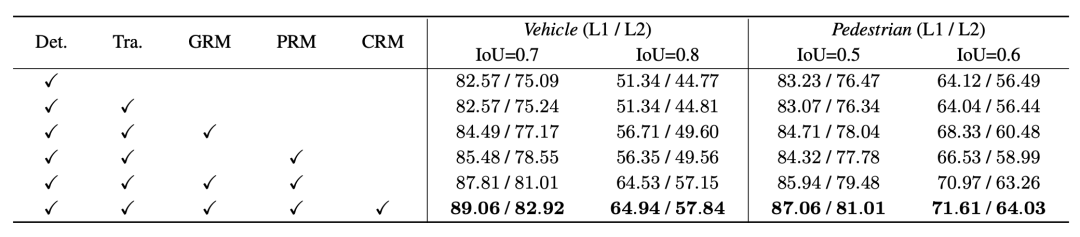 Waymo検証セットの車両と歩行者で実施され、IoUしきい値はそれぞれ標準値(0.7 & 0.5)と厳密値(0.8 & 0.6)を選択しました
Waymo検証セットの車両と歩行者で実施され、IoUしきい値はそれぞれ標準値(0.7 & 0.5)と厳密値(0.8 & 0.6)を選択しました
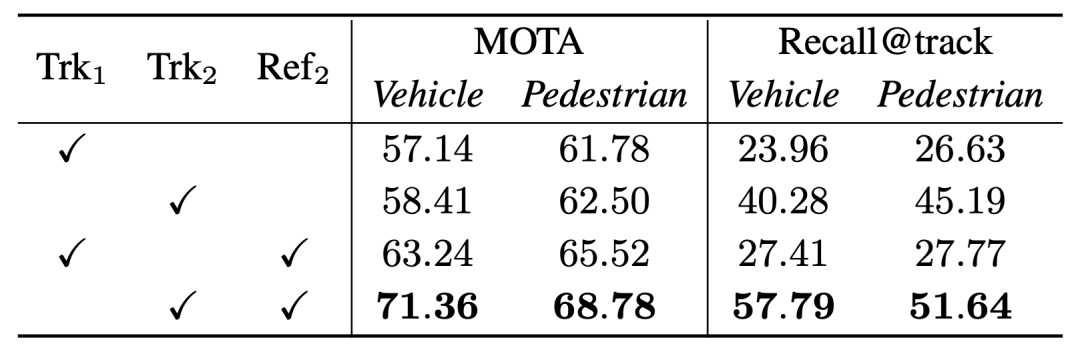
同時に、同じ一連の検出結果に対して、クロスコンビネーション検証のために 3DAL と DetZero のトラッカーと最適化モデルを選択しました。結果は、DetZero のトラッカーとオプティマイザーのパフォーマンスが優れており、この 2 つを組み合わせるとより効果的であることをさらに証明しました。利点。
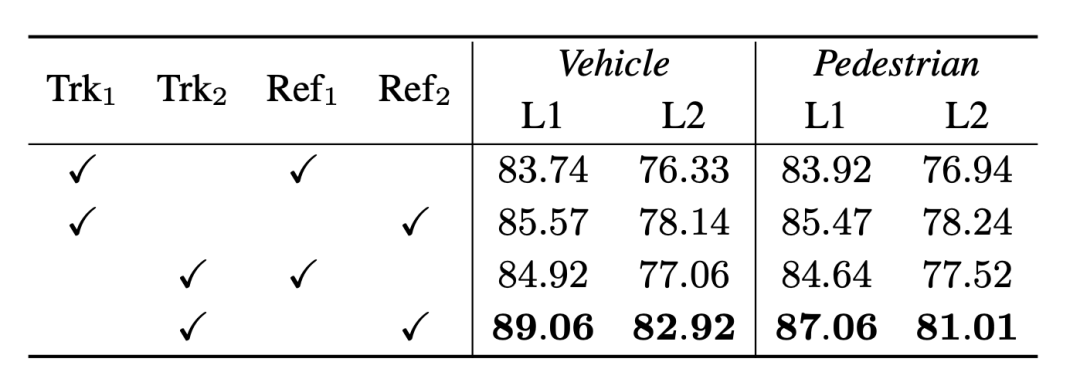 さまざまな上流モジュールと下流モジュールの組み合わせの相互検証実験。下付き文字 1 と 2 はそれぞれ 3DAL と DetZero を表し、インジケーターは 3D APHです。
さまざまな上流モジュールと下流モジュールの組み合わせの相互検証実験。下付き文字 1 と 2 はそれぞれ 3DAL と DetZero を表し、インジケーターは 3D APHです。
当社のオフライン トラッカーはより注目を集めていますオブジェクト シーケンスの完全性については、両者の MOTA パフォーマンスの差は非常に小さいですが、Recall@track のパフォーマンスが最終的な最適化パフォーマンスに大きな差をもたらす理由の 1 つです。
 オフライン トラッカー (Trk2) ) と 3DAL トラッカー (Trk1) MOTA と Recall@track のパフォーマンス比較
オフライン トラッカー (Trk2) ) と 3DAL トラッカー (Trk1) MOTA と Recall@track のパフォーマンス比較
さらに、他の最先端トラッカーとの比較もポイントを証明します
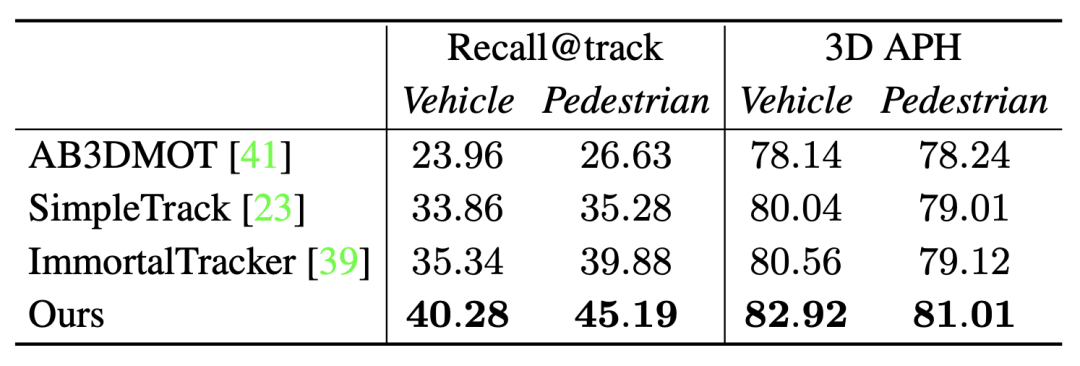 Recall@track追跡アルゴリズムによる処理後のシーケンス リコール、3D APH は同じ最適化モデルによる処理後の最終パフォーマンス
Recall@track追跡アルゴリズムによる処理後のシーケンス リコール、3D APH は同じ最適化モデルによる処理後の最終パフォーマンス
3.3 一般化パフォーマンス
最適化を検証するためモデル 上流の結果の特定のセットへの適合を修正できるかどうか、異なるパフォーマンスを持つ上流の検出追跡結果を入力として選択しました。結果は、パフォーマンスが大幅に向上したことを示しており、上流モジュールがより多くの完全なオブジェクト シーケンスを呼び出すことができる限り、オプティマイザーは最適化のために時系列点群の特性を効果的に利用できることをさらに証明しています。
Waymo 検証セットでの一般化パフォーマンス検証、指標は 3D APH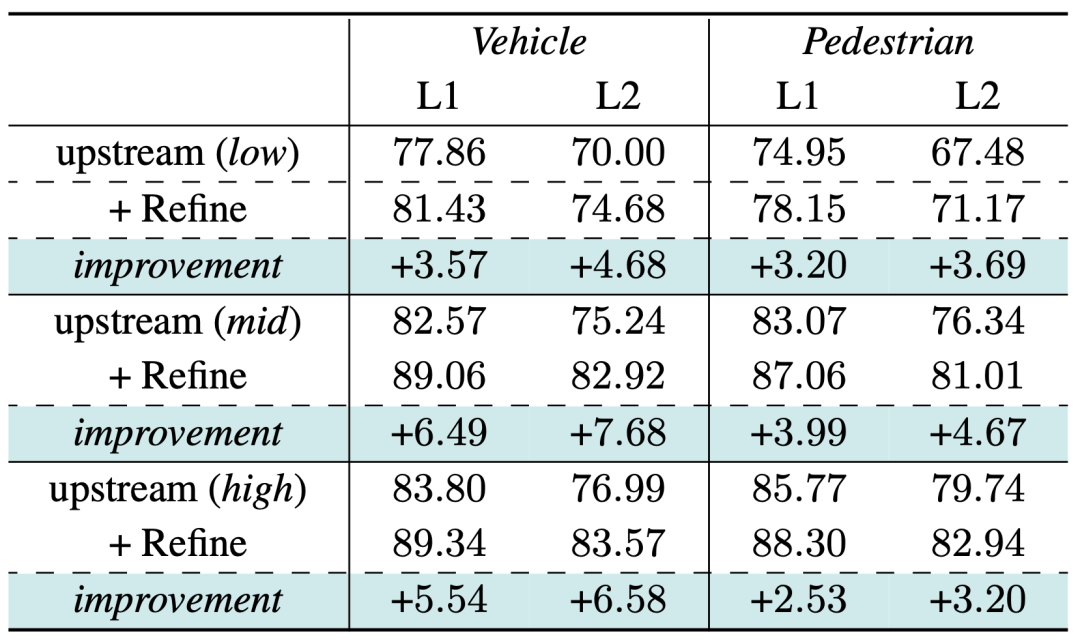
3DAL の実験設定を使用して、比較 5 つの指定されたシーケンスに対する DetZero の AP パフォーマンスをレポートします。単一フレームベースの再アノテーション結果と元のグラウンド トゥルース アノテーション結果の一貫性を比較することで人間のパフォーマンスを測定します。 3DAL や人間と比較して、DetZero はさまざまなパフォーマンス指標で利点を示しています。
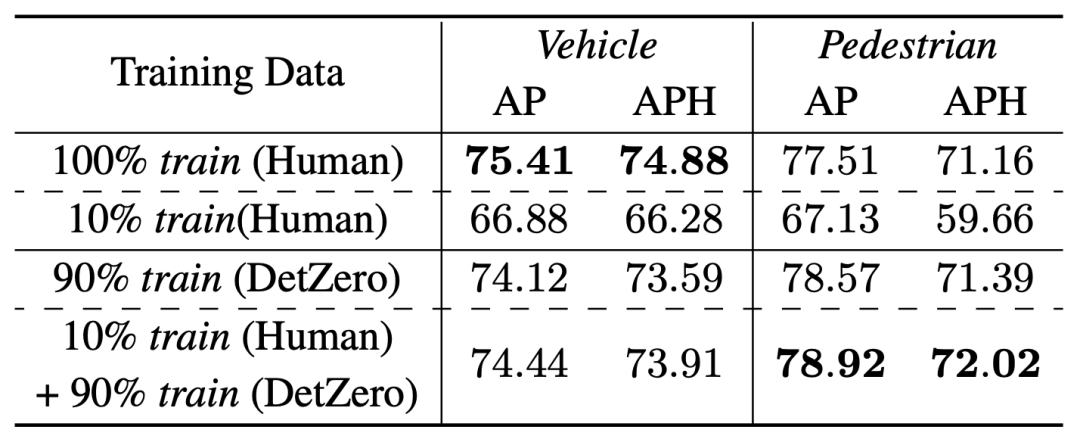
車両カテゴリのさまざまな IoU しきい値の下での 3D AP と BEV AP のパフォーマンスの比較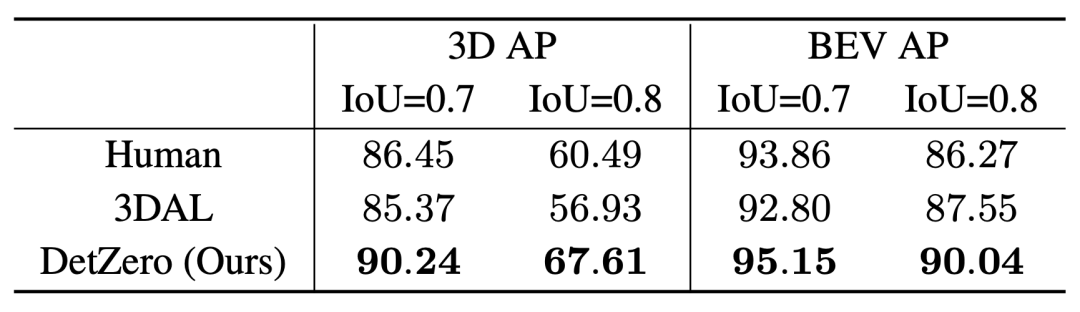 - 高品質の自動アノテーション結果は、オンライン モデル トレーニングの手動アノテーション結果を置き換えることができるため、Waymo 検証セットで半教師あり学習検証を実施しました。教師モデル (DetZero) のトレーニング データとしてトレーニング データの 10% をランダムに選択し、残りの 90% のデータに対して推論を実行して、自動アノテーションの結果を取得しました。この結果は、生徒モデルのラベルとして使用されます。学生モデルとしてシングルフレーム CenterPoint を選択しました。車両カテゴリでは、90% の自動ラベルと 10% の真のラベルを使用したトレーニングの結果は、100% の真のラベルを使用したトレーニングの結果に近いですが、歩行者カテゴリでは、自動ラベルでトレーニングされたモデルの結果がすでに優れています。自動ラベル付けがオンライン モデル トレーニングに使用できることを示す結果
- 高品質の自動アノテーション結果は、オンライン モデル トレーニングの手動アノテーション結果を置き換えることができるため、Waymo 検証セットで半教師あり学習検証を実施しました。教師モデル (DetZero) のトレーニング データとしてトレーニング データの 10% をランダムに選択し、残りの 90% のデータに対して推論を実行して、自動アノテーションの結果を取得しました。この結果は、生徒モデルのラベルとして使用されます。学生モデルとしてシングルフレーム CenterPoint を選択しました。車両カテゴリでは、90% の自動ラベルと 10% の真のラベルを使用したトレーニングの結果は、100% の真のラベルを使用したトレーニングの結果に近いですが、歩行者カテゴリでは、自動ラベルでトレーニングされたモデルの結果がすでに優れています。自動ラベル付けがオンライン モデル トレーニングに使用できることを示す結果
赤いボックスは上流の入力結果を表し、青いボックスは最適化モデルの出力結果を表します。
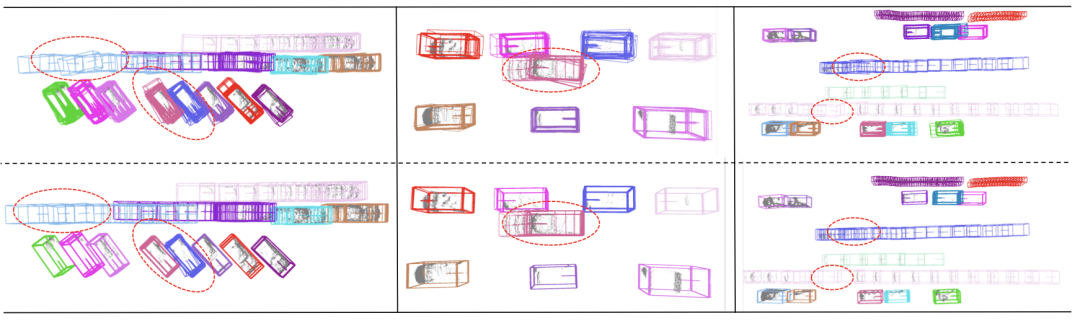
最初の行は上流の入力結果を表します。 2 行目は最適化モデルの出力結果を表し、点線内のオブジェクトは最適化前後で明らかな違いがある位置を表します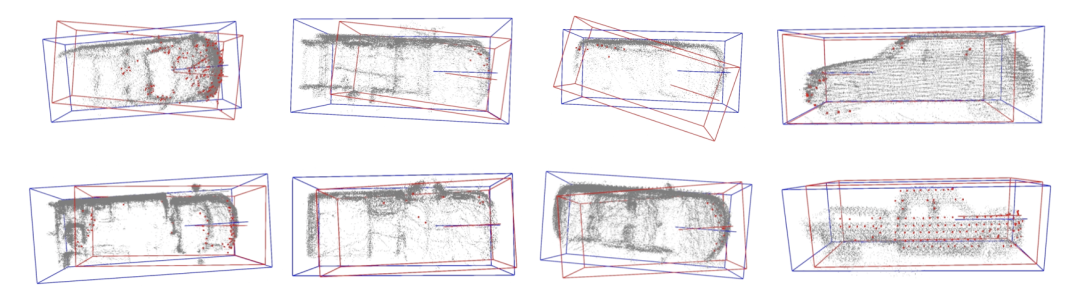
元のリンク: https://mp.weixin.qq.com/s/HklBecJfMOUCC8gclo-t7Q
以上がDetZero: Waymo は 3D 検出リストで 1 位にランクされており、手動アノテーションに匹敵します。の詳細内容です。詳細については、PHP 中国語 Web サイトの他の関連記事を参照してください。