



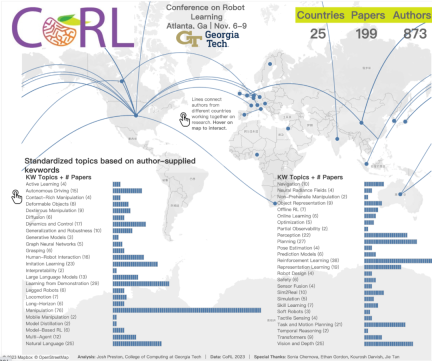
2017 年に初めて開催されて以来、CoRL はロボット工学と機械学習の交差点における世界トップクラスの学術会議の 1 つになりました。 CoRL は、ロボット学習研究のための単一テーマのカンファレンスであり、理論と応用を含むロボット工学、機械学習、制御などの複数のトピックをカバーします
2023 年の CoRL カンファレンスは 11 月に開催されます。は6日から9日まで米国アトランタで開催される。公式データによると、今年は25か国から199本の論文がCoRLに選ばれた。人気のあるトピックには、演算、強化学習などが含まれます。 CoRLはAAAIやCVPRなどの大規模なAI学会に比べて規模は小さいですが、今年は大型モデル、身体化知能、ヒューマノイドロボットなどの概念の人気が高まる中、CoRLカンファレンスでも関連する注目すべき研究が発表されます。 .
現在、CoRL 2023 関係者は、Best Paper Award、Best Student Paper Award、Best System Paper Award およびその他の賞を発表しています。次に、受賞論文を紹介します。
#最優秀論文
- ##論文: 抽出された特徴フィールドにより、少数のショットで言語ガイドに基づいた操作が可能になる
- 著者: William Shen、Ge Yang、Alan Yu、Jensen Wong、Leslie Pack Kaelbling、Phillip Isola
- 機関: MIT CSAIL 、IAIFI
- 論文アドレス: https://openreview.net/forum?id=Rb0nGIt_kh5
# 研究概要: 現在、画像モデルの自己教師あり学習と言語教師あり学習には、モデルの一般化能力にとって非常に重要な、豊富なグローバル知識が組み込まれています。ただし、画像の特徴には 2 次元の情報しか含まれません。ロボット工学のタスクでは、現実世界の 3 次元オブジェクトの幾何学形状を理解することが非常に重要であることがわかりました。
蒸留特徴フィールド (DFF) を使用することで、この研究では次のことが行われます。 2D ベース モデルからの豊富なセマンティクスを備えた正確な 3D ジオメトリにより、ロボットが 2D ベース モデル内の豊富なビジュアルおよび言語事前情報を活用して言語ガイド付き操作を完了できるようになります
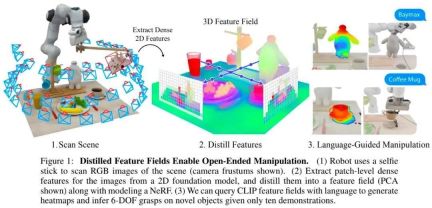
具体的には、この研究は、6-DOF のグラブと配置のための数ショット学習方法を提案し、強力な空間的および意味論的な事前分布を活用して、目に見えないオブジェクトに一般化します。この研究では、視覚言語モデル CLIP から抽出された特徴を使用して、新しいオブジェクトを操作するためのオープンエンドの自然言語命令を提案し、この方法が目に見えない表現や新しいオブジェクトに一般化できる能力を実証しています。
この論文の 2 人の共著者は、CSAIL "Embodied Intelligence" チームのメンバーである William Shen と Yang Ge です。Yang Ge は、2023 CSAIL Embodied Intelligence の共著者です。シンポジウム主催者。
この研究については「Heart of the Machine」で詳しく紹介されていると知りましたので、「ロボットは大きなモデルでどのくらい強力にサポートされているのか? MIT CSAIL&IAIFI は自然言語を使用してロボットに把握を誘導する」をご覧ください。オブジェクト 》
最優秀学生論文
- 論文: 助けを求めるロボット: 大規模言語モデル プランナーのための不確実性の調整
- 著者: Allen Z. Ren、Anushri Dixit、Alexandra Bodrova、Sumeet Singh、Stephen Tu、Noah Brown、Peng Xu、Leila Highyama、Fei Xia、Jake Varley、Zhenjia Xu、Dorsa Sadigh、Andy Zeng、Anirudha Majumdar
- 機関: プリンストン大学、Google DeepMind
- 論文アドレス: https://openreview.net/forum ?id=4ZK8ODNyFXx
大規模言語モデル (LLM) は、特にロボット工学の分野で幅広い応用が期待できるテクノロジです。ただし、LLM は段階的な計画と常識的な推論において大きな可能性を示しますが、いくつかの錯覚の問題にも悩まされます
これに基づいて、この研究は新しいフレームワークを提案します。 — KnowNo、LLM ベースのプランナーの不確実性を測定および調整します。これにより、LLM はどのような情報が不明であるかを認識し、必要なときに助けを求めることができます。
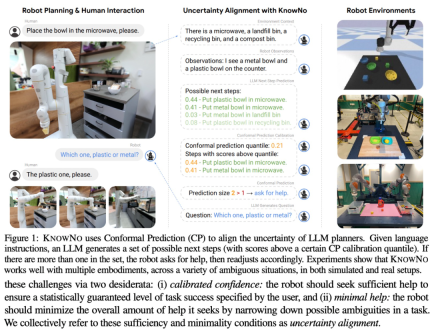
KnowNo は等角予測理論に基づいており、タスクの完了を統計的に保証し、複数ステップの計画タスクにおける人間の介入を最小限に抑えることができます。 この研究では、さまざまなシミュレーションおよび実際のロボット実験において、不確実なタスク (空間的不確実性、数値的不確実性などを含む) のさまざまなモードで KnowNo をテストしました。実験結果は、KnowNo が効率と自律性の向上に優れ、ベースラインを上回り、安全で信頼できることを示しています。 KnowNo は、モデルの微調整を行わずに LLM で直接使用でき、モデルの不確実性に対する効果的な軽量ソリューションを提供し、基礎となるモデルの向上する機能を補完します。
最優秀システム論文
 ##論文: RoboCook: Long-Horizon 弾塑性オブジェクト操作多様なツールを使用して
##論文: RoboCook: Long-Horizon 弾塑性オブジェクト操作多様なツールを使用して
- #著者: Haochen Shi、Huazhe Xu、Samuel Clarke、Yunzhu Li、Jiajun Wu
- 機関: スタンフォード大学、UIUC ##論文アドレス:
- https://openreview.net/forum?id=69y5fzvaAT
- 概要論文: 人間はさまざまなツールを作成して使用するのが得意ですが、ロボットにとって、ツールを効果的に使用し、対応するオブジェクトの操作を完了する方法を理解することは依然として大きな課題です。研究では、さまざまなツールを通じて弾塑性オブジェクトを感知、モデル化、操作できる RoboCook と呼ばれるインテリジェント ロボット システムを構築しました。
RoboCook は点群シーンを使用します表現、グラフ ニューラル ネットワーク (GNN) を活用してツールとオブジェクトの相互作用をモデル化し、ツール分類と自己教師ありポリシー学習を組み合わせてアクション プランを開発します。

実験結果によると、RoboCook のパフォーマンスは既存の SOTA 手法よりも大幅に優れており、厳しい外部干渉に直面しても安定性を示し、さまざまな材料に適応できます。この論文の共著者は、スタンフォード大学の博士課程の学生であり、スタンフォード大学の元博士研究員であり、現在は研究員である Haochen Shi であることは言及する価値があります。清華大学の専門研究員、情報科学研究所の徐華哲助教授、そして論文の著者の一人である姚嘉軍氏はヤオクラスの卒業生でスタンフォード大学の助教授である。
受賞論文の最終リストが発表されました
以上が中国チームが最優秀論文賞と最優秀システム論文賞を受賞し、CoRLの研究成果が発表されました。の詳細内容です。詳細については、PHP 中国語 Web サイトの他の関連記事を参照してください。

 ほとんどが使用されています10 Power BIチャート - 分析VidhyaApr 16, 2025 pm 12:05 PM
ほとんどが使用されています10 Power BIチャート - 分析VidhyaApr 16, 2025 pm 12:05 PMMicrosoft PowerBIチャートでデータ視覚化の力を活用する 今日のデータ駆動型の世界では、複雑な情報を非技術的な視聴者に効果的に伝えることが重要です。 データの視覚化は、このギャップを橋渡しし、生データを変換するi
 AIのエキスパートシステムApr 16, 2025 pm 12:00 PM
AIのエキスパートシステムApr 16, 2025 pm 12:00 PMエキスパートシステム:AIの意思決定力に深く飛び込みます 医療診断から財務計画まで、あらゆることに関する専門家のアドバイスにアクセスできることを想像してください。 それが人工知能の専門家システムの力です。 これらのシステムはプロを模倣します
 3人の最高の雰囲気コーダーがこのAI革命をコードで分解するApr 16, 2025 am 11:58 AM
3人の最高の雰囲気コーダーがこのAI革命をコードで分解するApr 16, 2025 am 11:58 AMまず第一に、これがすぐに起こっていることは明らかです。さまざまな企業が、現在AIによって書かれているコードの割合について話しており、これらは迅速なクリップで増加しています。すでに多くの仕事の移動があります
 滑走路AIのGen-4:AIモンタージュはどのように不条理を超えることができますかApr 16, 2025 am 11:45 AM
滑走路AIのGen-4:AIモンタージュはどのように不条理を超えることができますかApr 16, 2025 am 11:45 AM映画業界は、デジタルマーケティングからソーシャルメディアまで、すべてのクリエイティブセクターとともに、技術的な岐路に立っています。人工知能が視覚的なストーリーテリングのあらゆる側面を再構築し始め、エンターテイメントの風景を変え始めたとき
 5日間のISRO AI無料コースを登録する方法は? - 分析VidhyaApr 16, 2025 am 11:43 AM
5日間のISRO AI無料コースを登録する方法は? - 分析VidhyaApr 16, 2025 am 11:43 AMISROの無料AI/MLオンラインコース:地理空間技術の革新へのゲートウェイ インド宇宙研究機関(ISRO)は、インドのリモートセンシング研究所(IIRS)を通じて、学生と専門家に素晴らしい機会を提供しています。
 AIのローカル検索アルゴリズムApr 16, 2025 am 11:40 AM
AIのローカル検索アルゴリズムApr 16, 2025 am 11:40 AMローカル検索アルゴリズム:包括的なガイド 大規模なイベントを計画するには、効率的なワークロード分布が必要です。 従来のアプローチが失敗すると、ローカル検索アルゴリズムは強力なソリューションを提供します。 この記事では、Hill ClimbingとSimulについて説明します
 OpenaiはGPT-4.1でフォーカスをシフトし、コーディングとコスト効率を優先しますApr 16, 2025 am 11:37 AM
OpenaiはGPT-4.1でフォーカスをシフトし、コーディングとコスト効率を優先しますApr 16, 2025 am 11:37 AMこのリリースには、GPT-4.1、GPT-4.1 MINI、およびGPT-4.1 NANOの3つの異なるモデルが含まれており、大規模な言語モデルのランドスケープ内のタスク固有の最適化への動きを示しています。これらのモデルは、ようなユーザー向けインターフェイスをすぐに置き換えません
 プロンプト:ChatGptは偽のパスポートを生成しますApr 16, 2025 am 11:35 AM
プロンプト:ChatGptは偽のパスポートを生成しますApr 16, 2025 am 11:35 AMChip Giant Nvidiaは、月曜日に、AI Supercomputersの製造を開始すると述べました。これは、大量のデータを処理して複雑なアルゴリズムを実行できるマシンを初めて初めて米国内で実行します。発表は、トランプSI大統領の後に行われます


ホットAIツール

Undresser.AI Undress
リアルなヌード写真を作成する AI 搭載アプリ

AI Clothes Remover
写真から衣服を削除するオンライン AI ツール。

Undress AI Tool
脱衣画像を無料で

Clothoff.io
AI衣類リムーバー

AI Hentai Generator
AIヘンタイを無料で生成します。

人気の記事
ホットツール

ゼンドスタジオ 13.0.1
強力な PHP 統合開発環境

SublimeText3 Linux 新バージョン
SublimeText3 Linux 最新バージョン

AtomエディタMac版ダウンロード
最も人気のあるオープンソースエディター

SublimeText3 Mac版
神レベルのコード編集ソフト(SublimeText3)

VSCode Windows 64 ビットのダウンロード
Microsoft によって発売された無料で強力な IDE エディター

