



2023年10月26日、中国自動車技術学会、清華大学、北京大学が共催した「生成人工知能と自動運転」特別支部が北京イートロン国際会議展示センターで成功裡に開催された。このカンファレンスは、2023 年中国自動車工程協会年次会議および博覧会 (SAECCE2023) の「インテリジェント コネクテッド ビークル テクノロジー」の重要なテーマ部門の 1 つであり、主に知覚、測位など、生成人工知能テクノロジーと自動運転車の交差点について議論します。 、意思決定、制御、車両と道路の連携、アルゴリズムのセキュリティ、その他のアプリケーション。カンファレンスのトピックスには、人工知能アルゴリズムのセキュリティ強化、エンドツーエンドの自動運転、強化学習、車両と道路の協調センシング、最適制御のための分散型動作重要アルゴリズム、インテリジェント運転 AGI などが含まれます。
清華大学車両交通学院副学部長の李勝波教授がこの会議の議長を務め、会議を主宰した。北京大学工学部の研究者であるLiu Chang博士が会議の共同議長を務めた。会議では、清華大学、上海人工知能研究所、上海交通大学、北京科学技術大学、センスタイム研究所の6人の専門家や学者が素晴らしい基調講演を行い、フォーラムのインタラクティブな雰囲気は活発で活気に満ちたものでした。

Li Shengbo、清華大学車両交通学部副学部長
清華大学常任准教授の崔鵬氏は、自動運転アルゴリズムの安全性の観点から自動運転アルゴリズムの現在の安全性のボトルネックを分析し、自動運転アルゴリズムの安全性を向上させるための重要な技術的アプローチを提案しました。自動運転の人工知能の向上 インテリジェントアルゴリズムの分散外一般化機能。人工知能アルゴリズムの分布外一般化の問題に基づいて、自動運転に適用されるアルゴリズム一般化の重要性が強調され、これに基づいて、分布外一般化の問題を解決するための 2 つの解決策が提案されています。不変性を求める因果推論の外挿とデータベースの内挿に基づいています。続いて、崔鵬教授はチームの最近の研究結果を紹介し、実験を通じて彼らの手法が従来の自動運転アルゴリズムよりも強力な汎化性能を持っていることを証明しました。最後に、崔鵬教授は、既存の自動運転アルゴリズムの一般化の問題に対して新たな開発の方向性を示し、人工知能アルゴリズムの一般化境界評価を利用して、アルゴリズムをより理想的な状態に向けて開発できると考えました。

上海人工知能研究所の OpenDrive チームの若手研究者である Cao Xiaoxu 博士は、現在の開発状況に基づいて、自動運転を可能にするエンドツーエンド (E2E) テクノロジーの研究開発の進捗状況を共有しました。曹博士はまず自動運転分野の発展の歴史を振り返り、次に大型モデルによる自動運転分野を分析し、最後に自動運転業界の展望を述べた。彼は、E2E テクノロジーの中核は意思決定指向であるべきであり、これに基づいてさまざまなサブモジュールが統合されるべきだと考えています。そして、曹博士は、現在のテクノロジーには 3 つの主要な中核的課題、すなわち戦略競争の問題、世界モデルの開発、アルゴリズムの一般化の問題があると考え、この問題に関して、彼は OpenDrive チームの DriveAGI アーキテクチャを提案しました。車両をインテリジェント車両本体として統合し、推論、意思決定、実行、一般化を統合して、真に大きな自動運転モデルを開発します。最後に、曹博士は、第 3 世代のデータセットに期待しており、将来のデータセットは多様であるべきであり、サイズの拡大を前提として、タスクの多様性とシーンの多様性を備え、より優れたセンサー構成を備えている必要があると述べました。マルチモダリティと高い複雑性の特徴を持っています。

清華大学相互情報研究所の助教授である Xu Huazhe 博士は、強化学習技術の現在の開発状況について振り返りました。同氏は、産業界、特に自動運転の分野で使用されている強化学習アルゴリズムには、現在、特定の欠点があると考えています。これは、環境内でのエージェントの学習に遅延があり、深層強化学習によって生成されたデータとエージェントのアクションの間に強い相関があるためです。これに基づいて、Xu Huazhe 博士は、現在の強化学習アルゴリズムの 2 つの大きな問題、つまりサンプル効率の低さと汎化能力の低さを要約しました。彼は、最優先事項は、低いサンプル効率によって引き起こされる過小評価の問題を改善し、複数のタスクの失敗によってエージェントが正しい戦略の探索を失うことを回避することであると信じています。同時に、Xu Huazhe 博士は、強化学習アルゴリズムにも一般化の問題があると考えており、現在の状況に基づいて、彼と彼のチームは「RL-ViGen」と呼ばれるアルゴリズムを提案しました。一般化能力。

Xu Huazhe、清華大学相互情報研究所助教授
上海交通大学常任准教授のChen Siheng博士は、便利な通信を備えた車両と道路の協調センシング手法を紹介しました。自動運転は群衆センシングの重要な応用シナリオであり、重要な情報を自律的に共有することで、単一のエンティティでは克服するのが難しいセンシングの問題を解決できます。群衆センシングにおける膨大で時間とともに変化する通信リンク負荷という課題に直面して、Chen Siheng 博士のチームは、「実用的に駆動される認識の需要と供給」を使用して、適応可能な「マルチエージェント自律インタラクション」を推進する機械学習フレームワークを開拓しました。あらゆる通信帯域とラウンド数に対応し、通信消費量を削減し、移動物体検知効果を向上させます。最後に、Chen Siheng 博士は、群衆インテリジェンスのインタラクティブな知覚効果に影響を与えるさまざまな側面を系統的に紹介し、車両と道路のコラボレーション ソリューションの現実的な利点と大きな可能性を確認しました。

陳思恒、上海交通大学常任准教授
北京科学技術大学機械工学部長准教授のDuan Jinliang博士は、産業インテリジェンスのニーズとデータ駆動型制御の開発トレンドからスタートし、最適制御のためのソリューションツールとして強化学習を使用しました。自社開発の強化学習ソリューション ツール チェーン GOPS や値分布強化学習アルゴリズム (DSAC) など、コミュニティへの貢献。その中で、GOPS はモジュール構成を持ち、主流および自社開発のトレーニング アルゴリズム、さまざまな近似関数を組み込み、ジム、Simulink、カスタム環境をサポートし、産業上の問題からアプリケーション ソリューションへの橋渡しをします。 DSAC アルゴリズムは、価値関数の分布を学習することで、過大評価の問題を効果的に抑制し、パフォーマンスを着実に向上させることができます。現在、このアルゴリズムは制約タスク、対立タスク、スムーズニューラルネットワークなどと組み合わせて多様な拡張形態を実現しており、ハイブリッド車のエネルギー管理、削岩機制御、ロケット回収などのタスクに適用されている。

Duan Jinliang、北京科学技術大学機械工学准教授
SenseTime Research Instituteの研究開発ディレクターであるLu Lewei博士は、Jueying Intelligent Drivingの研究開発プロセスと開発レイアウトを体系的に紹介しました。業界をリードするシーケンシャル BEV アルゴリズム BEV フォーマーから大規模モデル ソリューション BEV フォーマー 2、障害物検出ソリューション OccNet に至るまで、SenseTime Jueying は産業界における認識テクノロジーの開発と実装において主導的な立場にあります。大規模モデルの強化の下で、SenseTime は、自動運転の知覚と意思決定を統合する、自動運転のためのマルチモーダル大規模モデル ソリューションである UniAD を提案し、学界と産業界から広く注目を集めました。これに基づいて、Jueying Intelligent Driving は一般的な人工知能の展開を継続し、自動運転のためのマルチモーダル大型モデル ソリューションのさらなる適用を促進します。

Lu Lewei、SenseTime Research Institute 研究開発ディレクター
会議後、李勝波教授は報告書に参加した専門家や学者に講演証明書を授与した。


以上がSAECCE 2023「生成人工知能と自動運転」特別セッションが盛会に開催されましたの詳細内容です。詳細については、PHP 中国語 Web サイトの他の関連記事を参照してください。

 カーソルAIでバイブコーディングを試してみましたが、驚くべきことです!Mar 20, 2025 pm 03:34 PM
カーソルAIでバイブコーディングを試してみましたが、驚くべきことです!Mar 20, 2025 pm 03:34 PMバイブコーディングは、無限のコード行の代わりに自然言語を使用してアプリケーションを作成できるようにすることにより、ソフトウェア開発の世界を再構築しています。 Andrej Karpathyのような先見の明に触発されて、この革新的なアプローチは開発を許可します
 2025年2月のトップ5 Genai発売:GPT-4.5、Grok-3など!Mar 22, 2025 am 10:58 AM
2025年2月のトップ5 Genai発売:GPT-4.5、Grok-3など!Mar 22, 2025 am 10:58 AM2025年2月は、生成AIにとってさらにゲームを変える月であり、最も期待されるモデルのアップグレードと画期的な新機能のいくつかをもたらしました。 Xai’s Grok 3とAnthropic's Claude 3.7 SonnetからOpenaiのGまで
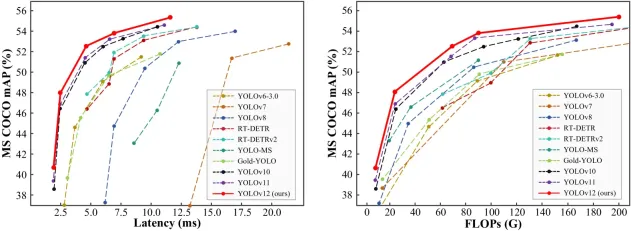 オブジェクト検出にYolo V12を使用する方法は?Mar 22, 2025 am 11:07 AM
オブジェクト検出にYolo V12を使用する方法は?Mar 22, 2025 am 11:07 AMYolo(あなたは一度だけ見ています)は、前のバージョンで各反復が改善され、主要なリアルタイムオブジェクト検出フレームワークでした。最新バージョンYolo V12は、精度を大幅に向上させる進歩を紹介します
 SORA vs VEO 2:よりリアルなビデオを作成するのはどれですか?Mar 10, 2025 pm 12:22 PM
SORA vs VEO 2:よりリアルなビデオを作成するのはどれですか?Mar 10, 2025 pm 12:22 PMGoogleのVEO 2とOpenaiのSORA:どのAIビデオジェネレーターが最高でしたか? どちらのプラットフォームも印象的なAIビデオを生成しますが、その強みはさまざまな領域にあります。 この比較は、さまざまなプロンプトを使用して、どのツールがニーズに最適かを明らかにします。 t
 Google' s Gencast:Gencast Mini Demoを使用した天気予報Mar 16, 2025 pm 01:46 PM
Google' s Gencast:Gencast Mini Demoを使用した天気予報Mar 16, 2025 pm 01:46 PMGoogle Deepmind's Gencast:天気予報のための革新的なAI 天気予報は、初歩的な観察から洗練されたAI駆動の予測に移行する劇的な変化を受けました。 Google DeepmindのGencast、グラウンドブレイク
 ChatGpt 4 oは利用できますか?Mar 28, 2025 pm 05:29 PM
ChatGpt 4 oは利用できますか?Mar 28, 2025 pm 05:29 PMCHATGPT 4は現在利用可能で広く使用されており、CHATGPT 3.5のような前任者と比較して、コンテキストを理解し、一貫した応答を生成することに大幅な改善を示しています。将来の開発には、よりパーソナライズされたインターが含まれる場合があります
 chatgptよりも優れたAIはどれですか?Mar 18, 2025 pm 06:05 PM
chatgptよりも優れたAIはどれですか?Mar 18, 2025 pm 06:05 PMこの記事では、Lamda、Llama、GrokのようなChatGptを超えるAIモデルについて説明し、正確性、理解、業界への影響における利点を強調しています(159文字)
 O1対GPT-4O:OpenAIの新しいモデルはGPT-4Oよりも優れていますか?Mar 16, 2025 am 11:47 AM
O1対GPT-4O:OpenAIの新しいモデルはGPT-4Oよりも優れていますか?Mar 16, 2025 am 11:47 AMOpenaiのO1:12日間の贈り物は、これまでで最も強力なモデルから始まります 12月の到着は、世界の一部の地域で雪片が世界的に減速し、雪片がもたらされますが、Openaiは始まったばかりです。 サム・アルトマンと彼のチームは12日間のギフトを立ち上げています


ホットAIツール

Undresser.AI Undress
リアルなヌード写真を作成する AI 搭載アプリ

AI Clothes Remover
写真から衣服を削除するオンライン AI ツール。

Undress AI Tool
脱衣画像を無料で

Clothoff.io
AI衣類リムーバー

AI Hentai Generator
AIヘンタイを無料で生成します。

人気の記事
ホットツール

SublimeText3 英語版
推奨: Win バージョン、コードプロンプトをサポート!

SublimeText3 中国語版
中国語版、とても使いやすい

WebStorm Mac版
便利なJavaScript開発ツール

SublimeText3 Mac版
神レベルのコード編集ソフト(SublimeText3)

SublimeText3 Linux 新バージョン
SublimeText3 Linux 最新バージョン
ホットトピック
 7447
7447 15137452
15137452