



強化学習におけるアルゴリズム選択の問題には、特定のコード例が必要です
強化学習は、エージェントとエージェントの間の対話を通じて最適な戦略を学習する機械学習の分野です。環境。 。強化学習では、適切なアルゴリズムを選択することが学習効果にとって非常に重要です。この記事では、強化学習におけるアルゴリズム選択の問題を調査し、具体的なコード例を示します。
強化学習では、Q ラーニング、Deep Q Network (DQN)、Actor-Critic など、選択できるアルゴリズムが多数あります。適切なアルゴリズムの選択は、問題の複雑さ、状態空間とアクション空間のサイズ、コンピューティング リソースの可用性などの要因によって異なります。
まず、単純な強化学習の問題である迷路問題を見てみましょう。この問題では、エージェントは始点から終点までの最短パスを見つける必要があります。 Q ラーニング アルゴリズムを使用して、この問題を解決できます。以下はサンプル コードです:
import numpy as np
# 创建迷宫
maze = np.array([
[1, 1, 1, 1, 1, 1, 1, 1, 1, 1],
[1, 0, 0, 1, 0, 0, 0, 1, 0, 1],
[1, 0, 0, 1, 0, 0, 0, 1, 0, 1],
[1, 0, 0, 0, 0, 1, 1, 0, 0, 1],
[1, 0, 1, 1, 1, 0, 0, 0, 0, 1],
[1, 0, 0, 0, 1, 0, 0, 0, 1, 1],
[1, 1, 1, 1, 1, 1, 1, 1, 1, 1]
])
# 定义Q表格
Q = np.zeros((maze.shape[0], maze.shape[1], 4))
# 设置超参数
epochs = 5000
epsilon = 0.9
alpha = 0.1
gamma = 0.6
# Q-Learning算法
for episode in range(epochs):
state = (1, 1) # 设置起点
while state != (6, 8): # 终点
x, y = state
possible_actions = np.where(maze[x, y] == 0)[0] # 可能的动作
action = np.random.choice(possible_actions) # 选择动作
next_state = None
if action == 0:
next_state = (x - 1, y)
elif action == 1:
next_state = (x + 1, y)
elif action == 2:
next_state = (x, y - 1)
elif action == 3:
next_state = (x, y + 1)
reward = -1 if next_state == (6, 8) else 0 # 终点奖励为0,其他状态奖励为-1
Q[x, y, action] = (1 - alpha) * Q[x, y, action] + alpha * (reward + gamma * np.max(Q[next_state]))
state = next_state
print(Q)上記のコードの Q 学習アルゴリズムは、Q テーブルを更新することによって最適な戦略を学習します。 Q テーブルの次元は迷路の次元に対応しており、各要素は特定の状態でさまざまなアクションを実行するエージェントの利点を表します。
Q ラーニングに加えて、他のアルゴリズムを使用して、より複雑な強化学習の問題を解決することもできます。たとえば、問題の状態空間とアクション空間が大きい場合、DQN などの深層強化学習アルゴリズムを使用できます。以下は簡単な DQN サンプル コードです。
import torch
import torch.nn as nn
import torch.optim as optim
import random
# 创建神经网络
class DQN(nn.Module):
def __init__(self, input_size, output_size):
super(DQN, self).__init__()
self.fc1 = nn.Linear(input_size, 16)
self.fc2 = nn.Linear(16, output_size)
def forward(self, x):
x = torch.relu(self.fc1(x))
x = self.fc2(x)
return x
# 定义超参数
input_size = 4
output_size = 2
epochs = 1000
batch_size = 128
gamma = 0.99
epsilon = 0.2
# 创建经验回放内存
memory = []
capacity = 10000
# 创建神经网络和优化器
model = DQN(input_size, output_size)
optimizer = optim.Adam(model.parameters(), lr=0.001)
# 定义经验回放函数
def append_memory(state, action, next_state, reward):
memory.append((state, action, next_state, reward))
if len(memory) > capacity:
del memory[0]
# 定义训练函数
def train():
if len(memory) < batch_size:
return
batch = random.sample(memory, batch_size)
state_batch, action_batch, next_state_batch, reward_batch = zip(*batch)
state_batch = torch.tensor(state_batch, dtype=torch.float)
action_batch = torch.tensor(action_batch, dtype=torch.long)
next_state_batch = torch.tensor(next_state_batch, dtype=torch.float)
reward_batch = torch.tensor(reward_batch, dtype=torch.float)
current_q = model(state_batch).gather(1, action_batch.unsqueeze(1))
next_q = model(next_state_batch).max(1)[0].detach()
target_q = reward_batch + gamma * next_q
loss = nn.MSELoss()(current_q, target_q.unsqueeze(1))
optimizer.zero_grad()
loss.backward()
optimizer.step()
# DQN算法
for episode in range(epochs):
state = env.reset()
total_reward = 0
while True:
if random.random() < epsilon:
action = env.action_space.sample()
else:
action = model(torch.tensor(state, dtype=torch.float)).argmax().item()
next_state, reward, done, _ = env.step(action)
append_memory(state, action, next_state, reward)
train()
state = next_state
total_reward += reward
if done:
break
if episode % 100 == 0:
print("Episode: ", episode, " Total Reward: ", total_reward)
print("Training finished.")上記のコードの DQN アルゴリズムは、ニューラル ネットワークを使用して Q 関数を近似し、環境内で対話してネットワークをトレーニングして最適なポリシーを学習します。
上記のコード例を通じて、強化学習では、問題の特性に応じて問題を解決するためにさまざまなアルゴリズムを選択できることがわかります。 Q-Learning は状態空間とアクション空間が小さい問題に適しており、DQN は状態空間とアクション空間が大きい複雑な問題に適しています。
しかし、実際のアプリケーションでは、アルゴリズムを選択するのは簡単な作業ではありません。問題の特性に応じて、さまざまなアルゴリズムを試し、その結果に基づいて最適なアルゴリズムを選択できます。アルゴリズムを選択するときは、アルゴリズムの収束、安定性、計算の複雑さなどの要素にも注意を払い、特定のニーズに基づいてトレードオフを行う必要があります。
つまり、強化学習ではアルゴリズムの選択が重要な部分となります。アルゴリズムを合理的に選択し、特定の問題に応じて調整および改善することで、実際のアプリケーションでより優れた強化学習の結果を達成できます。
以上が強化学習におけるアルゴリズム選択の問題の詳細内容です。詳細については、PHP 中国語 Web サイトの他の関連記事を参照してください。

 AIインデックス2025を読む:AIはあなたの友人、敵、または副操縦士ですか?Apr 11, 2025 pm 12:13 PM
AIインデックス2025を読む:AIはあなたの友人、敵、または副操縦士ですか?Apr 11, 2025 pm 12:13 PMスタンフォード大学ヒト指向の人工知能研究所によってリリースされた2025年の人工知能インデックスレポートは、進行中の人工知能革命の良い概要を提供します。 4つの単純な概念で解釈しましょう:認知(何が起こっているのかを理解する)、感謝(利益を見る)、受け入れ(顔の課題)、責任(責任を見つける)。 認知:人工知能はどこにでもあり、急速に発展しています 私たちは、人工知能がどれほど速く発展し、広がっているかを強く認識する必要があります。人工知能システムは絶えず改善されており、数学と複雑な思考テストで優れた結果を達成しており、わずか1年前にこれらのテストで惨めに失敗しました。 2023年以来、複雑なコーディングの問題や大学院レベルの科学的問題を解決することを想像してみてください
 Meta Llama 3.2を始めましょう - 分析VidhyaApr 11, 2025 pm 12:04 PM
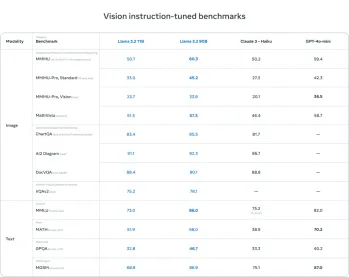
Meta Llama 3.2を始めましょう - 分析VidhyaApr 11, 2025 pm 12:04 PMメタのラマ3.2:マルチモーダルとモバイルAIの前進 メタは最近、ラマ3.2を発表しました。これは、モバイルデバイス向けに最適化された強力なビジョン機能と軽量テキストモデルを特徴とするAIの大幅な進歩です。 成功に基づいてo
 AVバイト:Meta&#039; s llama 3.2、GoogleのGemini 1.5などApr 11, 2025 pm 12:01 PM
AVバイト:Meta&#039; s llama 3.2、GoogleのGemini 1.5などApr 11, 2025 pm 12:01 PM今週のAIの風景:進歩、倫理的考慮、規制の議論の旋風。 Openai、Google、Meta、Microsoftのような主要なプレーヤーは、画期的な新しいモデルからLEの重要な変化まで、アップデートの急流を解き放ちました
 マシンと話すための人的費用:チャットボットは本当に気にすることができますか?Apr 11, 2025 pm 12:00 PM
マシンと話すための人的費用:チャットボットは本当に気にすることができますか?Apr 11, 2025 pm 12:00 PMつながりの慰めの幻想:私たちはAIとの関係において本当に繁栄していますか? この質問は、MIT Media Labの「AI(AHA)で人間を進める」シンポジウムの楽観的なトーンに挑戦しました。イベントではCondedgを紹介している間
 PythonのScipy Libraryの理解Apr 11, 2025 am 11:57 AM
PythonのScipy Libraryの理解Apr 11, 2025 am 11:57 AM導入 あなたが科学者またはエンジニアで複雑な問題に取り組んでいると想像してください - 微分方程式、最適化の課題、またはフーリエ分析。 Pythonの使いやすさとグラフィックスの機能は魅力的ですが、これらのタスクは強力なツールを必要とします
 ラマ3.2を実行する3つの方法-Analytics VidhyaApr 11, 2025 am 11:56 AM
ラマ3.2を実行する3つの方法-Analytics VidhyaApr 11, 2025 am 11:56 AMメタのラマ3.2:マルチモーダルAIパワーハウス Metaの最新のマルチモーダルモデルであるLlama 3.2は、AIの大幅な進歩を表しており、言語理解の向上、精度の向上、および優れたテキスト生成機能を誇っています。 その能力t
 Dagsterでデータ品質チェックを自動化しますApr 11, 2025 am 11:44 AM
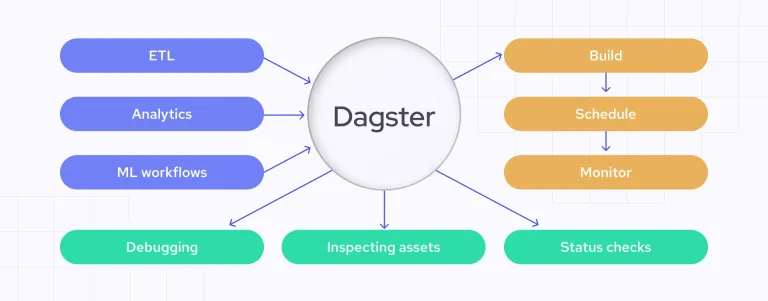
Dagsterでデータ品質チェックを自動化しますApr 11, 2025 am 11:44 AMデータ品質保証:ダグスターと大きな期待でチェックを自動化する データ駆動型のビジネスにとって、高いデータ品質を維持することが重要です。 データの量とソースが増加するにつれて、手動の品質管理は非効率的でエラーが発生しやすくなります。
 メインフレームはAI時代に役割を果たしていますか?Apr 11, 2025 am 11:42 AM
メインフレームはAI時代に役割を果たしていますか?Apr 11, 2025 am 11:42 AMMainFrames:AI革命のUnsung Heroes サーバーは汎用アプリケーションで優れており、複数のクライアントの処理を行いますが、メインフレームは大量のミッションクリティカルなタスク用に構築されています。 これらの強力なシステムは、頻繁にヘビルで見られます


ホットAIツール

Undresser.AI Undress
リアルなヌード写真を作成する AI 搭載アプリ

AI Clothes Remover
写真から衣服を削除するオンライン AI ツール。

Undress AI Tool
脱衣画像を無料で

Clothoff.io
AI衣類リムーバー

AI Hentai Generator
AIヘンタイを無料で生成します。

人気の記事
ホットツール

SAP NetWeaver Server Adapter for Eclipse
Eclipse を SAP NetWeaver アプリケーション サーバーと統合します。

MinGW - Minimalist GNU for Windows
このプロジェクトは osdn.net/projects/mingw に移行中です。引き続きそこでフォローしていただけます。 MinGW: GNU Compiler Collection (GCC) のネイティブ Windows ポートであり、ネイティブ Windows アプリケーションを構築するための自由に配布可能なインポート ライブラリとヘッダー ファイルであり、C99 機能をサポートする MSVC ランタイムの拡張機能が含まれています。すべての MinGW ソフトウェアは 64 ビット Windows プラットフォームで実行できます。

SublimeText3 Mac版
神レベルのコード編集ソフト(SublimeText3)

VSCode Windows 64 ビットのダウンロード
Microsoft によって発売された無料で強力な IDE エディター

SublimeText3 英語版
推奨: Win バージョン、コードプロンプトをサポート!

