

Microsoft AR/VR 特許は、マルチカメラ画像の位置合わせに角度と線の特徴を使用することを提案しています

MR システムは複数のカメラを使用できますが、レンダリング時に画像を位置合わせする必要があります。ただし、画像の位置合わせは難しい問題です。そこで、Microsoft は「コーナーとラインの特徴を使用した画像位置合わせ方法」というタイトルの特許出願で、解決策を提案しました
もちろん、業界では画像の位置合わせにコーナー機能を使用する方法がすでにあります。ただし、画像内の角を識別し、識別された角に基づいて画像を位置合わせすることは、時間がかかり、計算量が多い操作です。
Microsoft が提案しているのは、より優れた特徴マッチングを実現できる、より効果的な改善テクノロジです。本発明は主に、角特徴と線特徴を使用して視覚的位置合わせを実行するハイブリッド方法を導入し、この解決策により位置合わせプロセスに必要な制約が少なくなり、それによって計算効率と特徴マッチングが向上する。

たとえば、深夜に物体が冷えた後、環境の温度勾配は通常均一になる可能性があります。この場合、環境の温度プロファイルまたは温度勾配は、特定の等温閾値1115を下回る可能性がある。この場合、コンテンツを調整するための従来の手法は失敗する可能性があります。マイクロソフトによって説明された実施形態は、そのようなシナリオに対する解決策を提供する。

コーナー検出操作を実行して、画像内に存在する「コーナー」を識別します。例えば、実施形態は、第1の画像内の隅の特徴を識別するために使用され得る。言い換えれば、画像内でピクセルのセットを識別し、角度に対応するものと判断できます。
「コーナー」とは、不均一な強度の1つまたは複数のピクセルを指し、その1つまたは複数のピクセルに対して水平に配置され、第2の隣接ピクセルブロックの1つまたは複数のピクセルに対して垂直に配置された第1の近隣ピクセルブロックを有する。 。言い換えれば、コーナーは、ピクセルのセットに対して X および Y 方向で隣接するコーナーと対照をなす 1 つ以上のピクセルのセットとして定義されます。
第1の画像1205内のコーナー特徴1215を特定し、また、第2の画像1210内のコーナー特徴も特定する。したがって、コーナー特徴1225は首尾よく識別される。角度特徴 1225 と角度特徴 1215 は対応していることに注意してください。 ####画像コンテンツを位置合わせするために、この実施形態は、1230隅の閾値を識別するという任務を負っている。コーナーの閾値数は互いに対応している必要があります。換言すれば、第1の画像1205で識別された複数の角が識別されなければならず、第2の画像1210###で識別された複数の角に対応しなければならない。 #### これらの閾値が満たされる場合、実施形態は、画像位置合わせ動作を実行して、第2の画像1210からのコンテンツが位置合わせされ、その後、第1の画像1205からの対応するコンテンツとオーバーレイされる画像であるオーバーレイ画像1235を生成することができる。
コーナーの検出と位置合わせの実行は計算負荷の高い操作であり、検出されたコーナーと画像の一致が十分でない場合、プロセス全体が失敗する可能性があります。たとえば、コーナー ポイントのみを使用する方法では、1 つの画像から少なくとも 5 つのコーナー ポイントを特定し、それらを 2 番目の画像内の対応するコーナー ポイントと照合する必要があります。低コントラストの条件下では、対応する 5 つのコーナー ポイントを特定することさえ困難になる可能性があります
#### 十分な数の角を特定した後、実施形態は、5つの角を互いに位置合わせするために様々な回転および変換を実行することによって第1または第2の画像からの画像内容を適応させるために、運動モデルを使用して3D回転を特定する。画像。このような調整を実行すると、大量の計算が必要になります。したがって、角度メソッドのみを使用する場合に存在する制約を減らす必要があります。図 13 はそのようなテクニックを示しています。
図13は、コーナー点およびライン点検出1300のプロセスを示す。このプロセスには、図12のコーナー点検出1200動作とライン点検出動作の組み合わせが含まれる。コーナー検出動作とライン検出動作は同時に実行されることに注意してください。
通常、画像内の角を識別するよりも対応する「線」を識別する方が簡単なので、通常、線検出プロセスは角検出プロセスよりも高速です。 2 つのプロセスは並行して実行でき、ライン検出プロセスの方が高速であるため、ライン検出プロセスを追加しても、位置合わせプロセス全体の速度に悪影響はありません
ラインを組み合わせて画像を位置合わせすると、位置合わせプロセス中に使用する角の数が減り、制約が緩和され、全体的に位置合わせが容易になります。特に低温条件では、コーナーを見つけて一致させるのが難しいため、使用するコーナーの数を減らすことは非常に有益です。
「ライン」は、1 つ以上のピクセルのセットとして定義されます。これらのピクセルは、ピクセルのセットの水平方向に位置する最初の近くのピクセル ブロックに対して均一な強度を持ち、また、1 つのピクセルのセットに対して均一な強度を持ちます。ピクセル セットの垂直方向に位置する 2 番目に近いピクセル ブロックの強度が不均一です。あるいは、それらは、1つまたは複数のピクセルのセットの水平方向に位置する第1の近傍ピクセルブロックに関しては不均一な強度を有し、1つまたは複数のピクセルのセットに関して垂直方向に位置する第2の近傍ピクセルブロックに関しては均一な強度を有する。 # #### 図13には、図12の画像を表す第1の画像1305および第2の画像1310が示されている。図13は、第1の画像1305内のコーナー特徴1315##を検出できる実装方法も示している。最初の画像 1305 上でコーナー特徴を検出すると、線特徴 1320 および 1325 に示すように、線特徴も同時に検出されます。一般的に言えば、検出できる角の数に比べて、より多くの線を検出できます
2 番目の画像 1310 で角度と線の操作を実行します。例示の目的で、実施形態はコーナー特徴1330を特定する。コーナー検出動作と並行して、実施形態は、線特徴1335および線特徴1340など、第2の画像1310内の線を同時に検出する。
コーナー フィーチャ 1330 はコーナー フィーチャ 1315 に対応し、ライン フィーチャ 1335 はライン フィーチャ 1320 に対応することに注意してください。ライン フィーチャ 1340 はライン フィーチャ 1325 に対応します。実施形態は、これらの対応関係を識別し、次に、これらの特徴点を互いに位置合わせするのに適した運動モデルを生成または使用することができる###
発明の原理に従って、最初のしきい値を 1345 と定義しました。最初のしきい値は、2 つの画像を位置合わせするためにこれらの画像内で識別する必要がある、対応する角度特徴の数を指します。同時に、2 番目のしきい値 1350 も定義します。 2 番目のしきい値は、2 つの画像を揃えるために 2 つの画像内で識別する必要がある、対応する行特徴の数を指します。 ###第1の閾値1345および第2の閾値1350が満たされると、実施形態は第1の画像1305および第2の画像1310からのコンテンツを位置合わせしてオーバーレイ画像1355を生成することができる。通常、しきい値は、認識する必要があるコーナーとラインの合計数を指すことに注意してください。###ライン特徴検出を実行する利便性と速度を理解した後、なぜ実施形態がライン検出動作のみに依存し、コーナー検出動作の実行を回避するのか疑問に思うかもしれない。その理由は、画像内の線を検出すると絞りの問題が発生するためです。
書き換えられた内容は次のとおりです。 図 14 によれば、アパーチャの問題、つまりアパーチャの曖昧性が 1400 であることがわかります。図14では、線分1405は線全体の一部である。開口曖昧性 1400 は、線の複数の異なる部分が (ただし不正確に) 識別された線分 1405
に関連している可能性があるという事実を指します。 ###たとえば、線分1410は、実際には間違った位置または場所にあるにもかかわらず、線分1405と一致するピクセルのブロックである可能性がある。同様に、線分1415または線分1420は、線分1405内のピクセルをマッピングまたは一致させるピクセルのブロックを含むことができる。このようなシナリオでは、調整プロセスに曖昧さが生じます。
したがって、線検出プロセス自体に依存するだけでは十分な技術ではありません。換言すれば、線と角度の組み合わせに依存することにより、実施形態は緩和された制約を使用することができ、それによって計算効率が向上する。

プロセスフロー例1500を図15に示す。最初に、頭部装着カメラ画像1505および外部カメラ画像1510などの画像のセットが取得される。これらの画像は熱画像である可能性があります。画像内の温度勾配またはコントラスト1520は、特定のコントラスト閾値1525を下回る可能性がある。したがって、画像内の十分な数のコーナーを識別することは非常に困難な場合があります。この場合、ハイブリッド アプローチを利用して角と線の組み合わせを検出し、位置合わせを行うことができます
ヘッドマウントカメラ画像1505と外部カメラ画像1510を角度検出器1530とライン検出器1535に送信する。これら2つの検出器は同時に動作し、相互に依存しない
### ライン検出器1535は一般に、角度の検出においてコーナー検出器1530よりもラインの検出が速いことに留意されたい。つまり、ライン検出器1535の遅延時間は、角度検出器1530の遅延時間よりも短い。
コーナー検出器1530は、2つの画像を分析し、画像内のコーナー点1545を識別する。同様に、線検出器1535は2つの画像を分析し、画像内の線1550を識別する。次に、実施形態は、2つの画像内の対応する角および線を識別することによって位置合わせ1555を実行する。位置合わせを実行するには、ラインとコーナーのしきい値を決定する必要があります。一致するしきい値は、コーナーまたはラインの数を識別するためのしきい値よりも関連性があります。次に、実施形態は、識別された角および線を運動モデルなどの3Dモデル1560に適合させる。次いで、モデルフィッティング1565操作がモデル1560に対して実行され、一方の画像を回転、平行移動、および/または変換して、他方の画像内の対応する角および線を一致または整列させる。
言い換えれば、再投影操作を実行するとき、実施形態は、特定された角および線を使用して、ある画像のコンテンツを別の画像のコンテンツと位置合わせする
関連特許: Microsoft 特許 | コーナーおよびライン機能を使用した画像の位置合わせ「コーナーとラインの特徴を使用した画像の位置合わせ」というタイトルの Microsoft 特許出願は、2022 年 2 月に最初に提出され、最近米国特許商標庁によって公開されました。
以上がMicrosoft AR/VR 特許は、マルチカメラ画像の位置合わせに角度と線の特徴を使用することを提案していますの詳細内容です。詳細については、PHP 中国語 Web サイトの他の関連記事を参照してください。

 AIインデックス2025を読む:AIはあなたの友人、敵、または副操縦士ですか?Apr 11, 2025 pm 12:13 PM
AIインデックス2025を読む:AIはあなたの友人、敵、または副操縦士ですか?Apr 11, 2025 pm 12:13 PMスタンフォード大学ヒト指向の人工知能研究所によってリリースされた2025年の人工知能インデックスレポートは、進行中の人工知能革命の良い概要を提供します。 4つの単純な概念で解釈しましょう:認知(何が起こっているのかを理解する)、感謝(利益を見る)、受け入れ(顔の課題)、責任(責任を見つける)。 認知:人工知能はどこにでもあり、急速に発展しています 私たちは、人工知能がどれほど速く発展し、広がっているかを強く認識する必要があります。人工知能システムは絶えず改善されており、数学と複雑な思考テストで優れた結果を達成しており、わずか1年前にこれらのテストで惨めに失敗しました。 2023年以来、複雑なコーディングの問題や大学院レベルの科学的問題を解決することを想像してみてください
 Meta Llama 3.2を始めましょう - 分析VidhyaApr 11, 2025 pm 12:04 PM
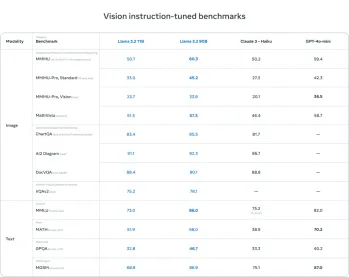
Meta Llama 3.2を始めましょう - 分析VidhyaApr 11, 2025 pm 12:04 PMメタのラマ3.2:マルチモーダルとモバイルAIの前進 メタは最近、ラマ3.2を発表しました。これは、モバイルデバイス向けに最適化された強力なビジョン機能と軽量テキストモデルを特徴とするAIの大幅な進歩です。 成功に基づいてo
 AVバイト:Meta' s llama 3.2、GoogleのGemini 1.5などApr 11, 2025 pm 12:01 PM
AVバイト:Meta' s llama 3.2、GoogleのGemini 1.5などApr 11, 2025 pm 12:01 PM今週のAIの風景:進歩、倫理的考慮、規制の議論の旋風。 Openai、Google、Meta、Microsoftのような主要なプレーヤーは、画期的な新しいモデルからLEの重要な変化まで、アップデートの急流を解き放ちました
 マシンと話すための人的費用:チャットボットは本当に気にすることができますか?Apr 11, 2025 pm 12:00 PM
マシンと話すための人的費用:チャットボットは本当に気にすることができますか?Apr 11, 2025 pm 12:00 PMつながりの慰めの幻想:私たちはAIとの関係において本当に繁栄していますか? この質問は、MIT Media Labの「AI(AHA)で人間を進める」シンポジウムの楽観的なトーンに挑戦しました。イベントではCondedgを紹介している間
 PythonのScipy Libraryの理解Apr 11, 2025 am 11:57 AM
PythonのScipy Libraryの理解Apr 11, 2025 am 11:57 AM導入 あなたが科学者またはエンジニアで複雑な問題に取り組んでいると想像してください - 微分方程式、最適化の課題、またはフーリエ分析。 Pythonの使いやすさとグラフィックスの機能は魅力的ですが、これらのタスクは強力なツールを必要とします
 ラマ3.2を実行する3つの方法-Analytics VidhyaApr 11, 2025 am 11:56 AM
ラマ3.2を実行する3つの方法-Analytics VidhyaApr 11, 2025 am 11:56 AMメタのラマ3.2:マルチモーダルAIパワーハウス Metaの最新のマルチモーダルモデルであるLlama 3.2は、AIの大幅な進歩を表しており、言語理解の向上、精度の向上、および優れたテキスト生成機能を誇っています。 その能力t
 Dagsterでデータ品質チェックを自動化しますApr 11, 2025 am 11:44 AM
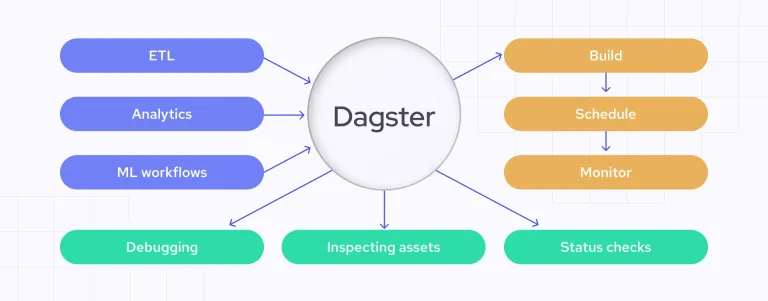
Dagsterでデータ品質チェックを自動化しますApr 11, 2025 am 11:44 AMデータ品質保証:ダグスターと大きな期待でチェックを自動化する データ駆動型のビジネスにとって、高いデータ品質を維持することが重要です。 データの量とソースが増加するにつれて、手動の品質管理は非効率的でエラーが発生しやすくなります。
 メインフレームはAI時代に役割を果たしていますか?Apr 11, 2025 am 11:42 AM
メインフレームはAI時代に役割を果たしていますか?Apr 11, 2025 am 11:42 AMMainFrames:AI革命のUnsung Heroes サーバーは汎用アプリケーションで優れており、複数のクライアントの処理を行いますが、メインフレームは大量のミッションクリティカルなタスク用に構築されています。 これらの強力なシステムは、頻繁にヘビルで見られます


ホットAIツール

Undresser.AI Undress
リアルなヌード写真を作成する AI 搭載アプリ

AI Clothes Remover
写真から衣服を削除するオンライン AI ツール。

Undress AI Tool
脱衣画像を無料で

Clothoff.io
AI衣類リムーバー

AI Hentai Generator
AIヘンタイを無料で生成します。

人気の記事
ホットツール

EditPlus 中国語クラック版
サイズが小さく、構文の強調表示、コード プロンプト機能はサポートされていません

SublimeText3 Linux 新バージョン
SublimeText3 Linux 最新バージョン

WebStorm Mac版
便利なJavaScript開発ツール

ゼンドスタジオ 13.0.1
強力な PHP 統合開発環境

AtomエディタMac版ダウンロード
最も人気のあるオープンソースエディター

