
ホームページ >テクノロジー周辺機器 >AI >ロボットが歯科インプラント手術を行い、「SF 大作」がここで舞台化される
ロボットが歯科インプラント手術を行い、「SF 大作」がここで舞台化される

- WBOY転載
- 2023-09-14 11:45:061559ブラウズ
ロボットが歯科インプラント手術を行い、「SF 大作」がここで舞台化されます
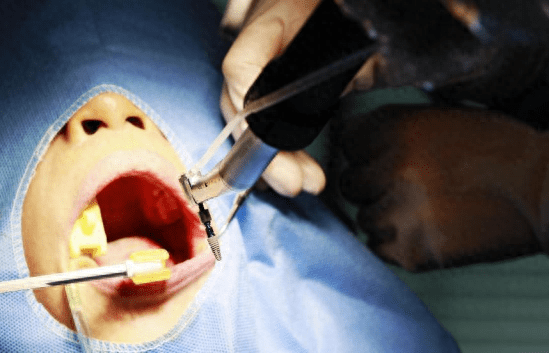
ポジショニング、ドリリング、インプラント埋入…この一連の作業はすべてロボットのメカニカルアームによって独立して完了します。 9月10日、この「SF超大作」のシーンは河南大学セス口腔科病院で行われた。口腔インプラントロボットは鄭州での手術を無事に完了し、河南省の口腔インプラントに新たな技術的課題をもたらすことになる。

自律型口腔歯科インプラントロボット手術が稼働中
9月10日14時、口腔歯科インプラントロボット手術が開始され、ロボットアームがインプラント開始位置に到達すると、副主治医の鄒貴科医師が術前の粘膜消毒や麻酔などを開始し、口腔唾液吸引チューブとロボットアームがマーカーの位置を決め、位置決めプローブを使用して位置決めプレートを継続的に登録し、患者の実際の口腔と術前設計に一致するインプラントデータを正確に記録し、計画を立てます。口腔に出入りする通路。
Zou Guike 氏の紹介によると、その日の午後、歯科インプラントロボットの手術が 2 件行われました。手術を受けた患者は全員40代で、長い間歯を失っていた。どちらの患者も 2 本の歯科インプラントを必要としました
書き換えが必要な内容は次のとおりです: インプラントが植立されようとしています
14:30、鄒貴池さんがペダルをそっと踏んで指令を出すと、ロボットアームが自律的に患者の口の中に進入した。インプラントチームの綿密な監督の下、正確な術前計画に基づいて、ロボットアームは自動キャリブレーション、入口および出口パスの自動実行、ドリリングの自動追跡、自動リフティングなどの外科手術手順を完了し、インプラントキャビティを独立して完成させます。準備、インプラント埋入などの手順を簡素化し、医師の手動操作を大幅に簡素化します。
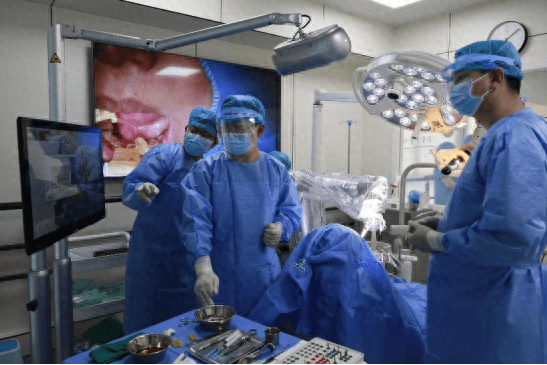
ゾウ・ガイケ博士のチームがデータを監視しています
「手術は非常にスムーズに進み、インプラントの位置は術前の計画と完全に一致していました。」Zou Guike 氏は、「ロボットは手術前に設定された標準的な経路に従って動作し、体内に存在する人工視覚を回避しました。」従来のインプラント手術と同様です。偏差や手作業による誤差はありますが、術後の CT 検査と術前計画とのマッチング データによると、誤差はわずか 0.3 mm であり、非常に正確であることがわかります。」
紹介文によると、中国工程院学会員の趙宜民氏とヤケ・インテリジェンスの王立峰博士らのチームは、2017年に完全な知的財産権を持つ世界初の自律型口腔歯科インプラントロボットを開発した。これまでに、このロボットは全国で歯を失った患者に対する1000件以上のインプラント手術を成功させてきた。特に複数の歯が欠損しているなどの複雑な症例の場合、ロボットは手術時間を大幅に短縮し、患者の痛みを軽減します。ガオ・ジュンリ
以上がロボットが歯科インプラント手術を行い、「SF 大作」がここで舞台化されるの詳細内容です。詳細については、PHP 中国語 Web サイトの他の関連記事を参照してください。