

L3は遅くとも来年上半期に発売される予定:理想的なエンドツーエンド自動運転と大幅に向上した性能

最近、生成 AI テクノロジーの台頭により、多くの新しい自動車製造勢力が視覚言語モデルと世界モデルの新しい方法を模索しており、エンドツーエンドのインテリジェント運転新技術が一般的な研究方向になっているようです。先月、Li Autoはエンドツーエンド+VLMビジュアル言語モデル+ワールドモデルの第3世代自動運転技術アーキテクチャをリリースした。このアーキテクチャは、インテリジェントな運転動作を体現し、AI の情報処理効率を向上させ、複雑な道路状況を理解して対応する能力を強化します。 Li Xiang 氏はかつて、ほとんどのアルゴリズムでは識別して処理することが難しい稀な運転環境に直面しても、VLM (Visual Language Model) によって自動運転の能力を系統的に向上させることができ、この方法は理論的には画期的な進歩であると公開共有で述べました。 。

この一連の自動運転技術アーキテクチャは、ノーベル賞受賞者ダニエル・カーネマンの高速システム理論と低速システム理論に触発されています。自動運転の分野で人間の思考と意思決定のプロセスをシミュレートするには、「高速システム」と「低速システム」も必要です。 。その中には:
・ 高速システム (システム 1) は単純なタスクの処理に優れており、自動運転における経験と習慣に基づいて形成された人間の直感であり、知覚と計画を含むエンドツーエンドの大規模なモデルで構成されています。これは、車両を運転するときの問題の 95% を処理するのに十分です。
・ 遅いシステム (システム 2) は、人間が深い理解と学習を通じて形成する論理的推論、複雑な分析、および計算能力であり、自動運転システムでは主に VLM モデルが使用され、複雑な問題や未知の問題を解決するために使用されます。自動車運転時のトラブル 日常の運転シーンのうち交通シーンは約5%を占めます。
先週、Li Auto の北京 R&D 本社で開催されたイベントで、Li Auto のインテリジェント運転担当副社長、Lang Xianpeng 氏は、Li Auto のインテリジェント運転がエンドツーエンド + 大型モデルのソリューションに完全に統合され、車両が複雑な道路状況や交通ルールを理解する。
「エンドツーエンドモデルと従来の知覚意思決定モデルの両方で、トレーニングに大量のデータが必要です。潜在的な問題の 1 つは、目に見えないシーンに遭遇するとシステムがうまく機能しないことです」と Lang Xianpeng 氏は述べています。 「私たちは車両が人間と同じように考え、決定できる能力を研究しています。」

昨年後半から、アイデアルは戦略を調整し、軌道を変更し始めました。今年 2 月、清華大学相互情報研究所とリー オートが提出した DriveVLM 論文では、研究者らは生成 AI の分野で最近登場した視覚言語モデル (VLM) を適用し、視覚的な理解と推論における並外れた能力を実証しました。 。
業界では、これは自動運転速度システムを提案する最初の作業であり、その方法は、主流の自動運転パイプラインと論理的思考を備えた大規模モデルパイプラインを完全に組み合わせ、最終テストの大規模モデル作業を完了した最初の作業です。展開 (NVIDIA Orin プラットフォームに基づく)。

DriveVLM は、3 つの主要モジュールを備えた Chain-of-Though (CoT) プロセスで構成されています:
- シナリオの説明: 言語を使用して運転環境を説明し、主要なオブジェクトを特定します。
- シナリオ分析: 主要なオブジェクトの特徴と、それらが自我という乗り物に与える影響を詳しく掘り下げます。
- 階層型計画: メタアクションと意思決定の説明からウェイポイントまでの段階的な計画開発。
これらのモジュールは、従来の自動運転システムのプロセスにおける認識、予測、計画のコンポーネントに対応します。違いは、物体認識、意図レベルの予測、およびタスクレベルの計画を処理する能力にあります。これらは、自動運転システムでは非常に困難でした。過去。
技術検証
理想的な検証テクノロジーは、ロングテールシナリオで効果的です:
- 実際の環境データを分解する
- 生成モデルを使用して新しい視点を補完する
- 天気、時間、交通の流れ、その他の条件の変更をカスタマイズする
実際のアプリケーション
Li AutoのエンドツーエンドモデルとVLMモデルはリアルタイムで実行されます:
- エンドツーエンドモデル: より高いフレームレート
- VLMモデル: より多くのパラメータ、より低いフレームレート
複雑な都市のシナリオでは、VLM は意思決定が不可能な状況で役割を果たし、意思決定の結果と軌跡をエンドツーエンドのモデルに提供します。
エンドツーエンドのアプローチ
エンドツーエンドのアプローチは技術的な分水嶺となり、AI の本格的な使用の始まりを示しています。
新世代AIモデル
新世代AIモデルは、質問作成者として機能します:
- 自家用車ドライバーの基準を満たすユーザーのデータを「本当の質問」として選択します
- 世界と組み合わせる「シミュレーションの質問」を生成するモデル
コンピューティングパワーチャレンジ
차량 측면에 VLM과 같은 모델을 배포하면 컴퓨팅 성능 문제에 직면하게 됩니다.
- 최적의 매개변수 수 유지
- 엔지니어링 최적화로 의사결정 지연 시간 개선
경쟁 전망
Tesla FSD는 곧 국내 지능형 운전 분야 진출 새로운 경쟁 무대 진입 :
- 이상차 목표 : End to End + VLM 자율주행 양산 납품
以上がL3は遅くとも来年上半期に発売される予定:理想的なエンドツーエンド自動運転と大幅に向上した性能の詳細内容です。詳細については、PHP 中国語 Web サイトの他の関連記事を参照してください。

 高次元データの高度なベクトルインデックス手法Apr 11, 2025 am 10:16 AM
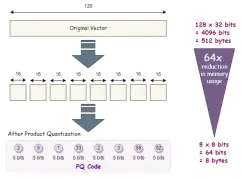
高次元データの高度なベクトルインデックス手法Apr 11, 2025 am 10:16 AM高次元ベクトル検索:高度なインデックス作成手法のマスタリング 今日のデータ駆動型の世界では、推奨システム、画像認識、自然言語処理(NLP)、異常などのアプリケーションに高次元ベクトルが重要です
 Openai'のクリップVIT-L14を使用したゼロショット画像分類Apr 11, 2025 am 10:04 AM
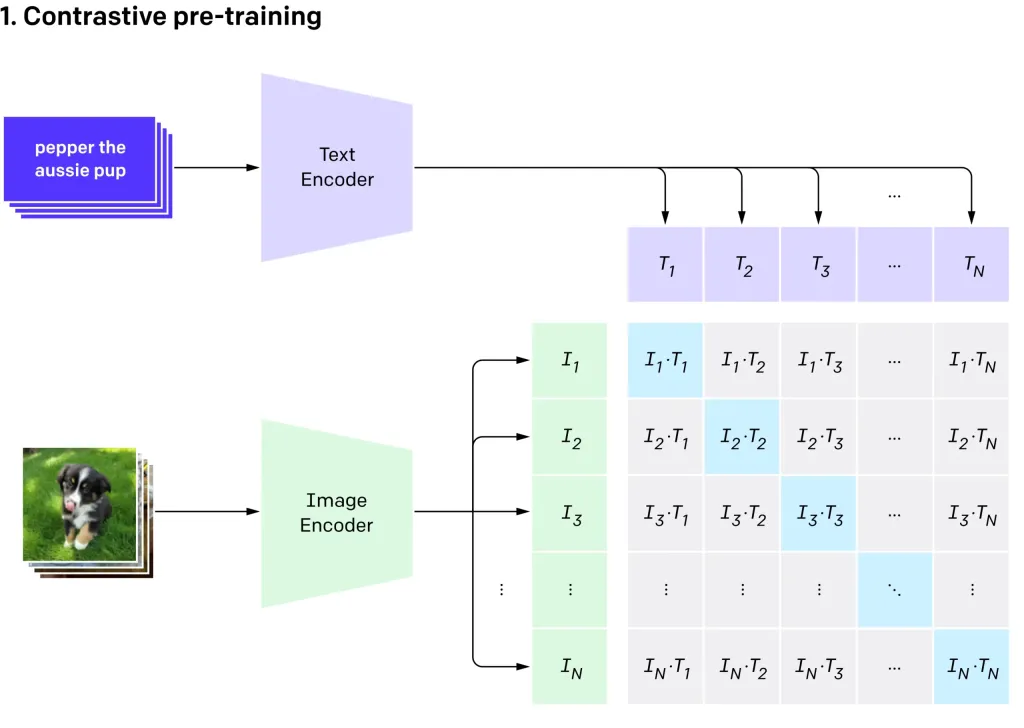
Openai'のクリップVIT-L14を使用したゼロショット画像分類Apr 11, 2025 am 10:04 AMOpenaiのクリップ(コントラスト言語 - イメージ前訓練)モデル、特にクリップVIT-L14バリアントは、マルチモーダル学習と自然言語処理の大幅な進歩を表しています。 この強力なコンピュータービジョンシステムは、RepreSeに優れています
 コードなしでAIエージェントを構築するための7つのステップ-AnalyticsVidhyaApr 11, 2025 am 10:03 AM
コードなしでAIエージェントを構築するための7つのステップ-AnalyticsVidhyaApr 11, 2025 am 10:03 AMWordwareを使用してAIエージェントのパワーを活用してください:楽なAIエージェント作成のためのノーコードプラットフォーム。 AIエージェントは、コンピューターとの対話方法、タスクの自動化、意思決定の合理化に革命をもたらしています。 このブログは、構築方法を示しています
 モバイルのLLMS:現在および将来の可能性 - 分析vidhyaApr 11, 2025 am 09:58 AM
モバイルのLLMS:現在および将来の可能性 - 分析vidhyaApr 11, 2025 am 09:58 AM生成AI:次のスマートフォンの戦場 スマートフォン業界は、高度な生成AIを統合するための競争である激しい競争に閉じ込められています。 ユーザーの相互作用の向上から生産性の向上まで、利害関係は高いです。 AppleのiPhone16
 2025年に続くトップ10の生成AIサブレッドディット - 分析vidhyaApr 11, 2025 am 09:51 AM
2025年に続くトップ10の生成AIサブレッドディット - 分析vidhyaApr 11, 2025 am 09:51 AM生成AI:10の必須redditコミュニティへのガイド 生成AIは急速に進化しており、新しいモデルが絶えず出現しています。 更新のままであることが重要であり、Redditはこの分野に特化した活気のあるコミュニティを提供しています。この記事はtを強調しています
 AIモデルの重要な課題と制限 - 分析VidhyaApr 11, 2025 am 09:44 AM
AIモデルの重要な課題と制限 - 分析VidhyaApr 11, 2025 am 09:44 AM導入 人工知能(AI)は、AIの研究開発への実質的な投資によって促進されたさまざまな職場に急速に統合されています。 AIのアプリケーションは、仮想アシスタントのような単純なタスクからcomまで、幅広い範囲に広がっています
 SQLでnull値を処理しますApr 11, 2025 am 09:37 AM
SQLでnull値を処理しますApr 11, 2025 am 09:37 AM導入 データベースの領域では、ヌル値はしばしば独自の課題を提示します。 欠落している、未定義、または未知のデータを表して、データ管理と分析を複雑にする可能性があります。顧客のフィードバックが欠落している販売データベースまたはORDEを検討してください
 Google GeminiをTableau Dashboardsに統合する方法は?Apr 11, 2025 am 09:27 AM
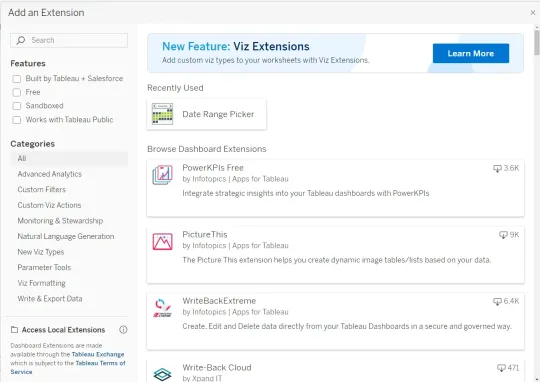
Google GeminiをTableau Dashboardsに統合する方法は?Apr 11, 2025 am 09:27 AMTableauでGoogle Geminiのパワーを利用するダッシュボード:AI駆動の強化 Tableauの堅牢な視覚化機能、データ準備(Tableau Prep Builder)、データストーリーテリング(Tableau Desktop)、およびCollaborative共有(Table


ホットAIツール

Undresser.AI Undress
リアルなヌード写真を作成する AI 搭載アプリ

AI Clothes Remover
写真から衣服を削除するオンライン AI ツール。

Undress AI Tool
脱衣画像を無料で

Clothoff.io
AI衣類リムーバー

AI Hentai Generator
AIヘンタイを無料で生成します。

人気の記事
ホットツール

Dreamweaver Mac版
ビジュアル Web 開発ツール

EditPlus 中国語クラック版
サイズが小さく、構文の強調表示、コード プロンプト機能はサポートされていません

WebStorm Mac版
便利なJavaScript開発ツール

SAP NetWeaver Server Adapter for Eclipse
Eclipse を SAP NetWeaver アプリケーション サーバーと統合します。

SublimeText3 Mac版
神レベルのコード編集ソフト(SublimeText3)

