
ホームページ >テクノロジー周辺機器 >AI >PID およびカーネギーメロン大学よりも滑らかな制御アルゴリズム
PID およびカーネギーメロン大学よりも滑らかな制御アルゴリズム

- 王林オリジナル
- 2024-06-09 09:57:28865ブラウズ

MPC制御アルゴリズム、正式名はモデル予測制御(Model Predictive Control)で、システム動的モデルに基づく制御技術です。これは、数学的モデルを通じてシステムの将来の動作を予測し、これらの予測に基づいてシステムの制御入力を最適化して、目的の出力を達成することによって機能します。 MPC 制御アルゴリズムの中心的な考え方は、各制御サイクルで将来の一定期間の予測結果を最適化することで、最適な制御入力を取得することです。この最適化は、所望の出力を達成するためにシステムの制御入力を最適化するためのいくつかの予測結果に基づいています。 MPC 制御アルゴリズムは広く使用されており、いくつかの制約を満たす必要がある制御システムに特に適しています。システム モデルと最適化技術を組み合わせることで、MPC はさまざまな業界で使用できます。MPC 制御アルゴリズムの中核は、システムの現在の状態情報に基づいて将来のシステム状態を予測できる予測モデルにあります。予測モデルの形式は固定されておらず、状態空間方程式、伝達関数、ステップ応答モデル、インパルス応答モデル、ファジィ モデルなどが考えられます。具体的な形式は、制御対象と予測する必要がある状態によって異なります。
TinyMPC は、凸モデル予測制御に特化したオープンソース ソルバーであり、高速計算を提供します。 TinyMPC は最小限の依存関係で C++ で実装されており、資産に制約のあるプラットフォーム上の組み込み制御およびロボット工学アプリケーションに特に適しています。 TinyMPC は、状態と入力の境界だけでなく、2 次制約も処理できます。 Python、Julia、MATLAB インターフェイスは、組み込みシステム用のコードの生成に利用できます。
ボット デモTinyMPC は、プライバシーが強化されたコンピューティング アプリケーションのサポートを提供し、安全なマルチパーティ コンピューティングとリソースに制約のある処理プラットフォームの間のギャップを埋めるために使用できます。コンピューティング能力が不十分なロボットに TinyMPC を組み込むと、ロボットは操作を迅速に実行でき、安全に実行できるという利点が得られます。
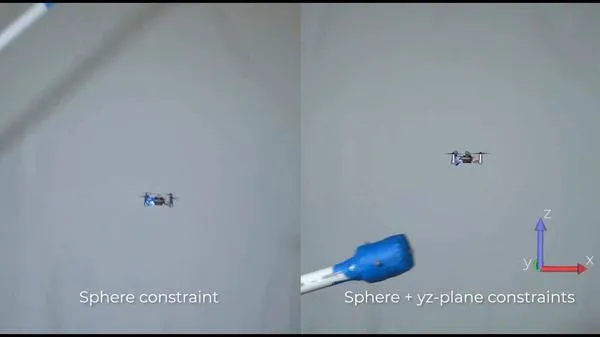
動的障害物回避TinyMPC は、各タイム ステップで制約を再線形化するのに十分な速度で実行され、移動する障害物について推論できるようになります。左側では、ジョイスティックの端を中心とする仮想球が、タイム ステップごとに新しい超平面制約のセットに線形化されます。このアルゴリズムは、意味のある任意の数の任意の線形制約を処理することもできます。たとえば、右側では、yz 平面に留まりながらスティックの端でスティックの端を回避します。
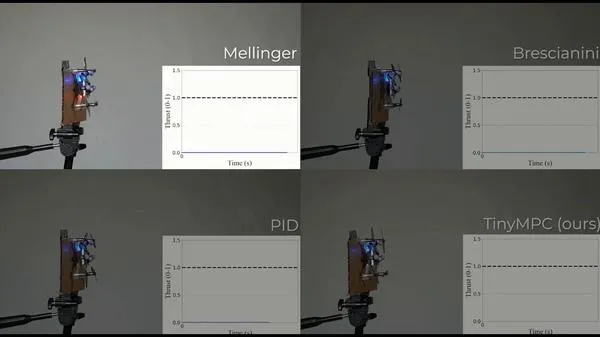
TinyMPC は、極端な状況下でも回復を開始できます。この例では、Crazyflie 2.1 のオリジナル コントローラーと比較されています。 TinyMPC だけが管理限界を突破し、クリーンなリカバリ操作を実現できます。
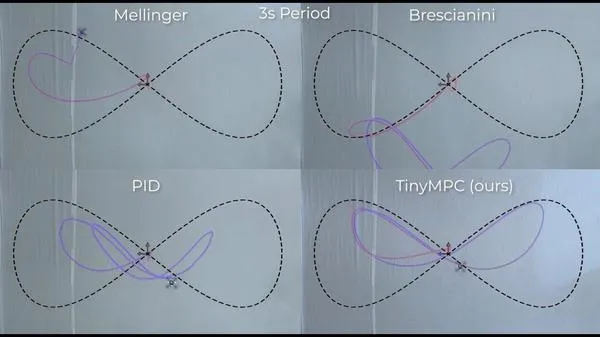
実現不可能な高速 8 の字追跡タスクに同じ純正コントローラーを使用しました (8 の字 1 時間は、ドローンがより強力な場合にのみ達成できます)。 TinyMPC と PID は直立状態を維持できますが、TinyMPC の軌道は 8 の字に近くなります。
マイクロコントローラーのベンチマークでは、TinyMPC は速度とメモリ使用量の点で最先端のソルバーを上回っています。ランダムに生成された QP ベースの MPC 問題を解決し、反復時間とメモリ フットプリントを OSQP と比較します。 OSQP 上での TinyMPC の最大速度向上は、はるかに少ないメモリで OSQP の 8 倍です。
 TinyMPC は円錐制約も処理できるようになりました。 (b) では、ロケットの軟着陸問題をサポートする 2 つの既存のコーン ソルバー (SCS および ECOS) に対して TinyMPC をベンチマークします。 TinyMPC は、SCS で平均 13 倍、ECOS で 137 倍の高速化を達成します。
TinyMPC は円錐制約も処理できるようになりました。 (b) では、ロケットの軟着陸問題をサポートする 2 つの既存のコーン ソルバー (SCS および ECOS) に対して TinyMPC をベンチマークします。 TinyMPC は、SCS で平均 13 倍、ECOS で 137 倍の高速化を達成します。
 リアルタイム制御では、ソルバーが厳密な時間枠内で解を返す必要があります。ロケットの軟着陸問題に関して、各解法に使用できる時間を人為的に変化させながら、TinyMPC の軌道追跡パフォーマンスを SCS および ECOS の軌道追跡パフォーマンスと比較しました。 TinyMPC は、すべての制御期間にわたって SCS および ECOS よりも制約違反が少なく、トラッキング エラーが少ないです。
リアルタイム制御では、ソルバーが厳密な時間枠内で解を返す必要があります。ロケットの軟着陸問題に関して、各解法に使用できる時間を人為的に変化させながら、TinyMPC の軌道追跡パフォーマンスを SCS および ECOS の軌道追跡パフォーマンスと比較しました。 TinyMPC は、すべての制御期間にわたって SCS および ECOS よりも制約違反が少なく、トラッキング エラーが少ないです。
 アルゴリズムの寄稿者:
アルゴリズムの寄稿者:
コード取得アドレス:
GitHub - TinyMPC/TinyMPC: マイクロコントローラーのモデル予測制御
以上がPID およびカーネギーメロン大学よりも滑らかな制御アルゴリズムの詳細内容です。詳細については、PHP 中国語 Web サイトの他の関連記事を参照してください。