
Maison >Périphériques technologiques >IA >Comment intégrer étroitement la cartographie en ligne et la prédiction de trajectoire ?
Comment intégrer étroitement la cartographie en ligne et la prédiction de trajectoire ?

- PHPzavant
- 2024-04-03 12:00:181321parcourir
Titre original : Produire et exploiter l'incertitude cartographique en ligne dans la prévision de trajectoire
Lien papier : https://arxiv.org/pdf/2403.16439.pdf
Lien code : https://github.com/alfredgu001324/MapUncertaintyPrediction
Affiliation de l'auteur : Vector Institute NVIDIA Research, Université de Toronto
Idée de thèse :
Les cartes de haute précision (HD) jouent un rôle indispensable dans le développement de piles technologiques de véhicules autonomes (AV) modernes, bien que l'étiquetage. et les coûts de maintenance associés à cela sont élevés. Par conséquent, de nombreux travaux récents proposent des méthodes d’estimation en ligne de cartes HD à partir de données de capteurs, compliquant ainsi l’intégration dans les piles technologiques de conduite autonome. En particulier, ils ne génèrent pas d’estimations d’incertitude ou de confiance. Cet article étend plusieurs méthodes d'estimation de cartes en ligne de pointe pour permettre des estimations supplémentaires de l'incertitude et améliorer la puissance prédictive jusqu'à 15 % sur l'ensemble de données de conduite nuScenes du monde réel. Ce faisant, nous constatons que l'intégration de l'incertitude améliore la convergence de la formation jusqu'à 50 % et améliore la puissance prédictive jusqu'à 15 % sur l'ensemble de données de conduite nuScenes du monde réel.
Principales contributions :
Cet article présente une description générale de l'incertitude des cartes vectorisées et étend de nombreuses méthodes d'estimation de cartes en ligne de pointe pour produire en plus des estimations d'incertitude sans dégrader les performances du graphique de construction pure.
Cet article analyse empiriquement les sources potentielles d'incertitude cartographique, confirme le manque de confiance dans les méthodes actuelles d'estimation cartographique et fournit des informations pour les orientations de recherche futures.
Cet article discutera des récents modèles d'estimation de carte en ligne combinés à plusieurs méthodes de prédiction de trajectoire de pointe, et montrera comment améliorer considérablement les performances et les caractéristiques de formation des modèles de prédiction en aval et accélérer la convergence de la formation en intégrant l'incertitude de cartographie en ligne. à 50 % et améliore la précision des prédictions en ligne de 15 %.
Conception de réseau :
Un élément clé de la conduite autonome est la compréhension de l'environnement statique, par exemple le tracé des routes et la circulation autour des véhicules autonomes (VA). Par conséquent, des cartes de haute précision (HD) ont été développées pour capturer et fournir de telles informations, contenant des informations sémantiques telles que les limites des routes, les séparateurs de voies et les marquages routiers au niveau centimétrique. Ces dernières années, les cartes HD se sont révélées indispensables au développement et au déploiement de véhicules autonomes et sont aujourd’hui largement utilisées [35]. Cependant, les cartes HD sont coûteuses à annoter et à maintenir dans le temps, et elles ne peuvent être utilisées que dans des zones géo-clôturées, ce qui limite l’évolutivité des véhicules autonomes. ”.
Pour résoudre ces problèmes, de nombreuses études récentes se tournent vers l'estimation en ligne de cartes de haute précision (HD) à partir de données de capteurs. D'une manière générale, elles visent à prédire les emplacements et les catégories d'éléments cartographiques, généralement sous la forme de polygones ou de polygones. polylignes, toutes Cependant, les méthodes actuelles d'estimation de cartes en ligne ne produisent aucune information pertinente sur l'incertitude ou la confiance à partir des images de caméra et des analyses LiDAR, ce qui est problématique car cela conduit à des informations cachées pour les consommateurs en aval. Les composants cartographiques déduits sont implicitement supposés être déterministes. et toute erreur de cartographie (par exemple, un mouvement ou un placement incorrect des éléments de la carte) peut conduire à un comportement erroné en aval, cet article propose de révéler l'incertitude de la carte dans les méthodes d'estimation de la carte en ligne et de les intégrer dans les modules en aval. L'article intègre l'incertitude cartographique dans la prédiction de trajectoire et constate que les systèmes de cartographie et de prédiction qui intègrent l'incertitude cartographique (Figure 1) sont nettement meilleurs que ceux qui n'en intègrent pas. Les performances sont considérablement améliorées par rapport au système. l'incertitude de la méthode d'estimation de carte de haute précision (HD) en ligne et son intégration dans les modules en aval apportent de multiples avantages. Figure de gauche : Carte HD réelle et emplacements des agents. Milieu : prédiction HiVT [41] à l'aide de la carte de sortie MapTR [22]. À droite : Carte utilisant la sortie MapTR [22] avec une incertitude de point ajoutée (en raison de la route de gauche). Prédiction HiVT [41] où la limite est obstruée par des véhicules stationnés et l'incertitude est grande)
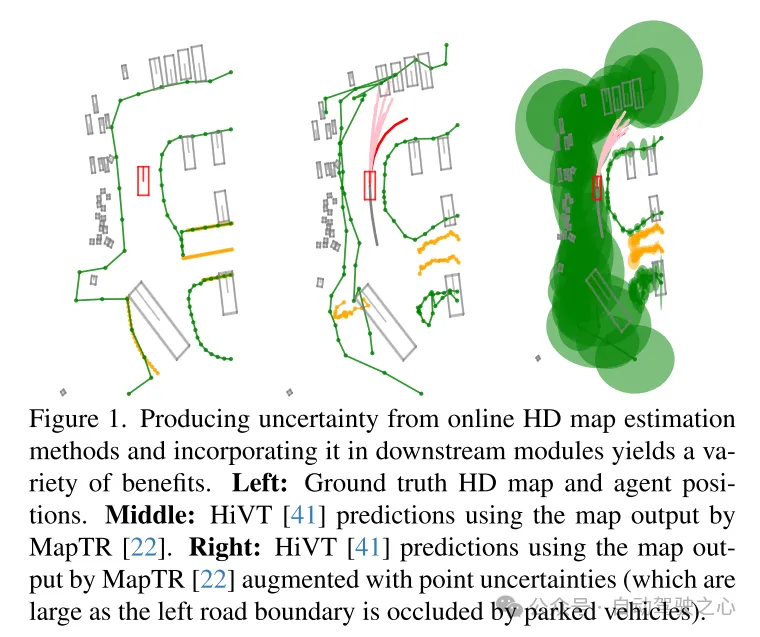
Figure 2. De nombreux sommets en ligne. -Les méthodes d'estimation de carte vectorielle de précision codent des images multi-caméras et les transforment en un espace de caractéristiques de graphique à vol d'oiseau (BEV) commun et fonctionnent en régressant les sommets des éléments de la carte. Ce travail améliore cette structure de sortie commune en ajoutant une méthode probabiliste. tête de régression, modélisant chaque sommet de la carte comme une distribution laplacienne pour l'évaluation. Les effets en aval qui en résultent, cet article étend davantage le modèle de prédiction en aval pour coder l'incertitude de la carte, en améliorant l'encodeur de carte basé sur le réseau neuronal graphique (GNN) et basé sur le transformateur
.Résultats expérimentaux :
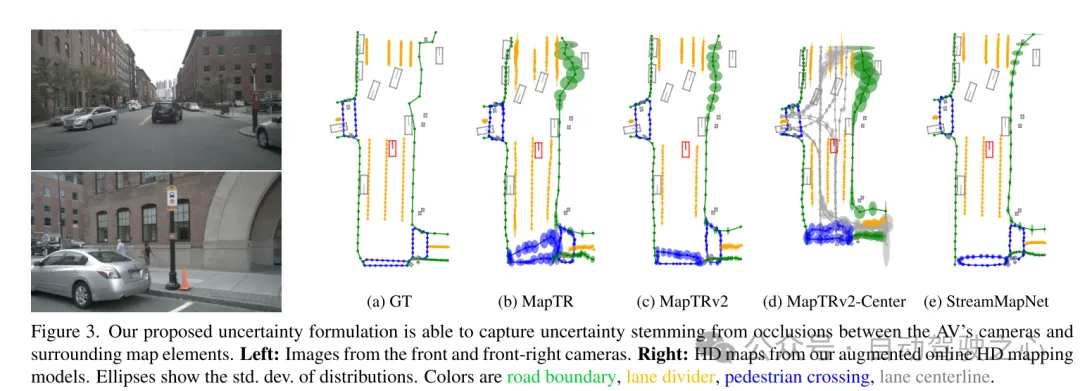
Figure 3. La représentation de l'incertitude proposée dans cet article est capable de capturer l'incertitude causée par les occlusions entre la caméra d'un véhicule autonome (AV) et les éléments cartographiques environnants. Gauche : Images des caméras avant et avant droite. À droite : carte HD générée par le modèle de carte en ligne de haute précision amélioré dans cet article. L'ellipse représente l'écart type de la distribution. Les couleurs représentent les limites des routes, les séparateurs de voies, les passages pour piétons et les lignes médianes des voies.
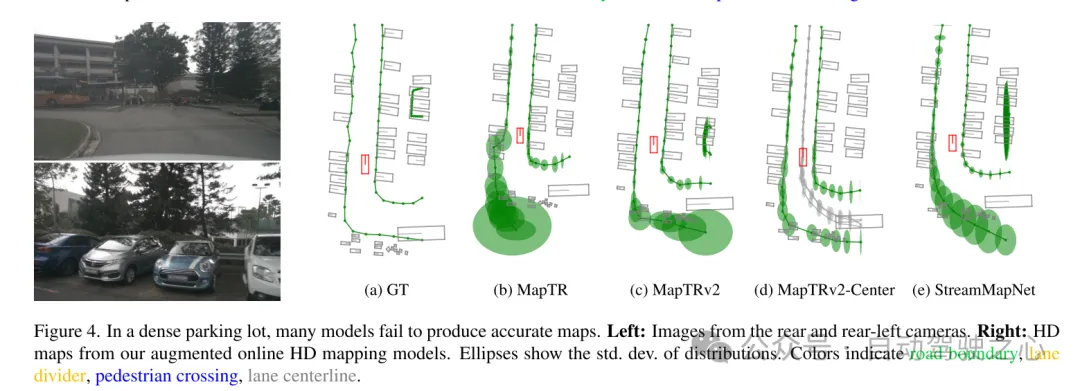
Figure 4. Dans un parking dense, de nombreux modèles ne parviennent pas à produire des cartes précises. Gauche : images des caméras arrière et arrière gauche. À droite : carte HD générée par le modèle de carte en ligne de haute précision amélioré dans cet article. L'ellipse montre l'écart type de la distribution. Les couleurs représentent les limites des routes, les séparateurs de voies, les passages pour piétons et les lignes médianes des voies.
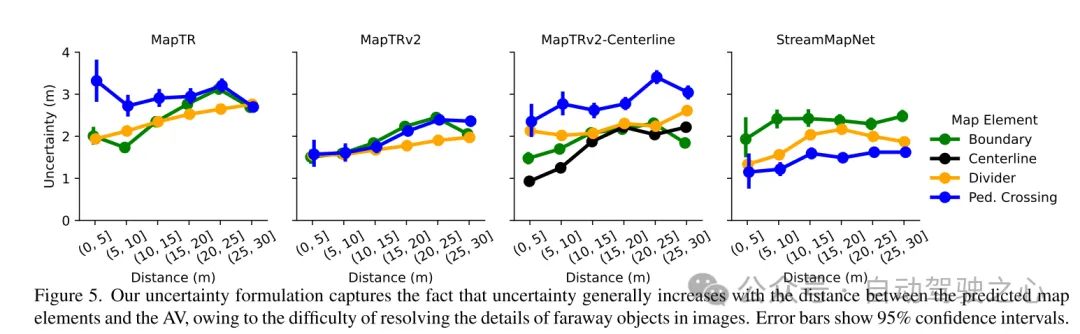
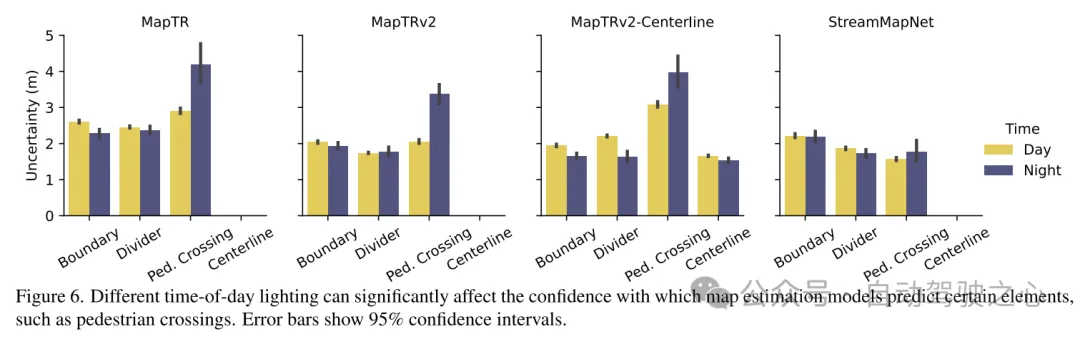
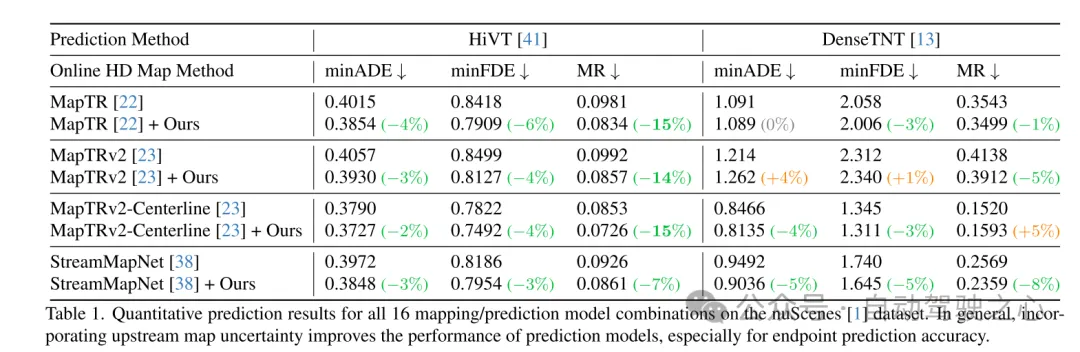
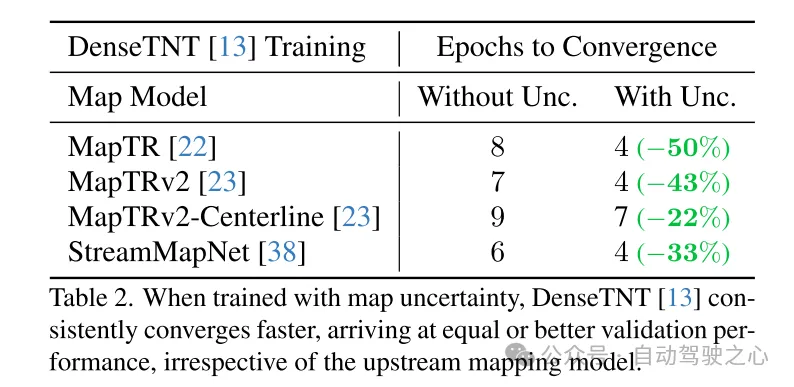
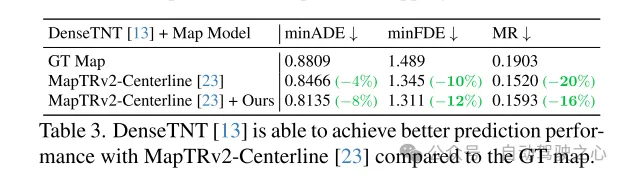
Résumé: Ce document propose une formule généralisée d'incertitude de carte vectorisée et étend une variété de méthodes d'estimation de carte en ligne récentes, y compris MAPTR [22], MAPTRV2 [23] et StreamMapNet [38], leur permettant de générer en plus de l'incertitude. Nous analysons systématiquement l'incertitude qui en résulte et constatons que notre approche capture de nombreuses sources d'incertitude (occlusions, distance de la caméra, heure de la journée et météo). Enfin, cet article combine ces modèles d'estimation de carte en ligne avec des méthodes de prédiction de trajectoire de pointe (DenseTNT [13] et HiVT [41]) et montre que l'intégration de l'incertitude cartographique en ligne améliore considérablement les performances et les caractéristiques d'entraînement des modèles de prédiction. , respectivement jusqu'à 15 % et 50 %. Une direction de recherche future passionnante consiste à utiliser ces résultats d’incertitude pour mesurer l’étalonnage des modèles cartographiques (similaire à [16]). Cependant, cette tâche est compliquée par la nécessité de faire correspondre des ensembles de points flous, ce qui constitue un problème difficile en soi.
Citation :
Gu X, Song G, Gilitschenski I, et al. Produire et exploiter l'incertitude des cartes en ligne dans la prévision de trajectoire[J].
Ce qui précède est le contenu détaillé de. pour plus d'informations, suivez d'autres articles connexes sur le site Web de PHP en chinois!
Articles Liés
Voir plus- CSS et JS réalisent le magnifique effet de mouvement de la trajectoire du ciel étoilé
- Canvas implémente un exemple de méthode consistant à maintenir la souris enfoncée et à se déplacer pour tracer une trajectoire
- Comment faire bouger des éléments le long d'une trajectoire parabolique en JS
- Explication détaillée de la technologie de planification des décisions de conduite autonome
- L'apprentissage par renforcement profond s'attaque à la conduite autonome dans le monde réel