
Maison >Périphériques technologiques >IA >Né pour la conduite autonome, Lightning NeRF : 10 fois plus rapide
Né pour la conduite autonome, Lightning NeRF : 10 fois plus rapide

- WBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBavant
- 2024-03-19 18:19:08985parcourir
Écrit ci-dessus et compréhension personnelle de l'auteur
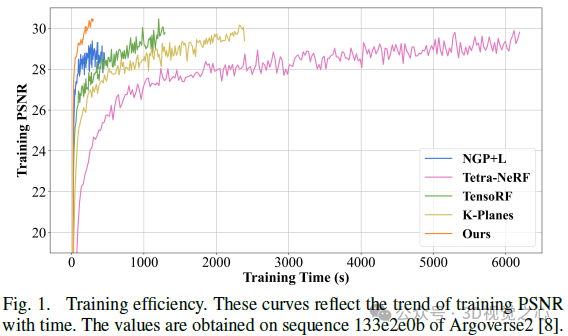
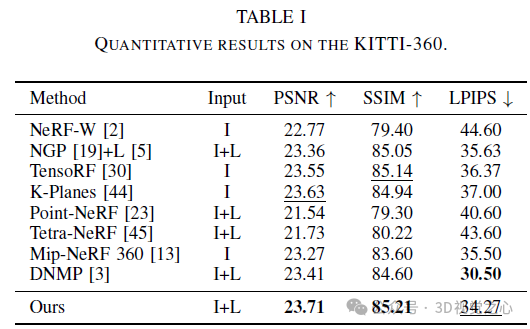
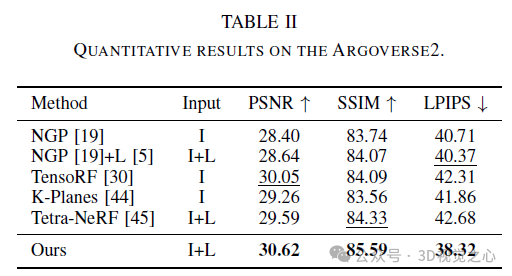
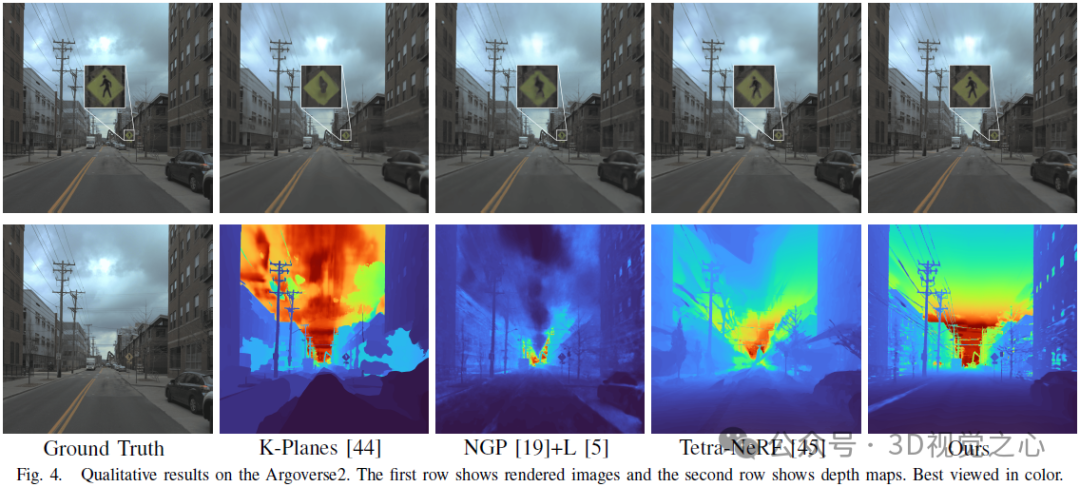
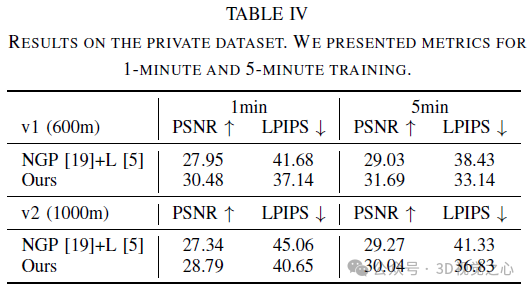
Des recherches récentes ont souligné les perspectives d'application du NeRF dans les environnements de conduite autonome. Cependant, la complexité des environnements extérieurs, associée aux points de vue restreints dans les scènes de conduite, complique la tâche de reconstruction précise de la géométrie de la scène. Ces défis se traduisent souvent par une qualité de reconstruction réduite et des durées de formation et de rendu plus longues. Pour relever ces défis, nous avons lancé Lightning NeRF. Il utilise une représentation de scène hybride efficace qui exploite efficacement les a priori géométriques du lidar dans des scénarios de conduite autonome. Lightning NeRF améliore considérablement les nouvelles performances de synthèse de vues de NeRF et réduit la surcharge de calcul. Grâce à une évaluation sur des ensembles de données du monde réel tels que KITTI-360, Argoverse2 et notre ensemble de données privé, nous démontrons que notre méthode dépasse non seulement l'état de l'art actuel en termes de qualité de synthèse de nouvelles vues, mais améliore également la vitesse d'entraînement. Cinq fois plus rapide et un rendu dix fois plus rapide. Lien H Code : https://gision-sjtu/lightning-insf
 Explication détaillée de l'approche de scénario de fonction Lightning Nerf
Explication détaillée de l'approche de scénario de fonction Lightning Nerf
preliminaries
nerf Function, ces fonctions implicites sont généralement paramétrées par MLP. Il est capable de renvoyer la valeur de couleur c et la prédiction de densité volumique σ d'un point 3D x dans la scène en fonction de la direction de visualisation d. 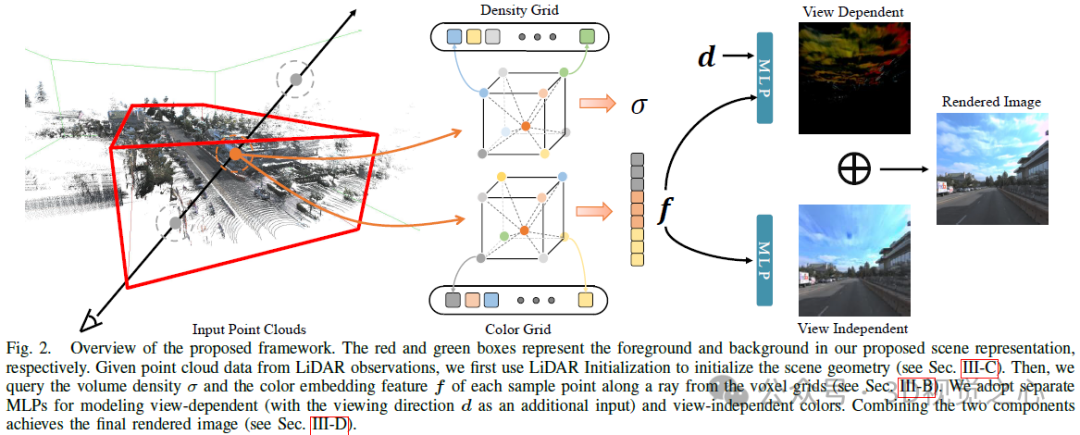
Pour restituer les pixels, NeRF utilise un échantillonnage de volume hiérarchique pour générer une série de points le long d'un rayon r, puis combine les caractéristiques de densité et de couleur prédites à ces emplacements par accumulation. 
Bien que NeRF fonctionne bien dans la synthèse de nouvelles perspectives, son long temps de formation et sa vitesse de rendu lente sont principalement causés par l'inefficacité de la stratégie d'échantillonnage. Pour améliorer l'efficacité du modèle, nous maintenons une occupation de grille grossière pendant la formation et échantillonnons uniquement les emplacements dans le volume occupé. Cette stratégie d'échantillonnage est similaire aux travaux existants et permet d'améliorer les performances du modèle et d'accélérer la formation. 
Représentation de scène hybride
La représentation de volume hybride a été optimisée et rendue rapidement à l'aide de modèles compacts. Compte tenu de cela, nous adoptons une représentation en grille de voxels hybride pour modéliser le champ de rayonnement afin d’améliorer l’efficacité. En bref, nous modélisons explicitement la densité volumétrique en stockant σ aux sommets du maillage, tout en utilisant un MLP peu profond pour décoder implicitement la couleur intégrant f dans la couleur finale c. Pour gérer la nature sans frontières des environnements extérieurs, nous divisons la représentation de la scène en deux parties, premier plan et arrière-plan, comme le montre la figure 2. Plus précisément, nous examinons le tronc de la caméra dans chaque image de la séquence de trajectoires et définissons le cadre de délimitation du premier plan de telle sorte qu'il enveloppe étroitement tous les troncs de cône dans le système de coordonnées aligné. La zone d'arrière-plan est obtenue en agrandissant la zone de premier plan le long de chaque dimension.
Représentation de la grille Voxel
. Une représentation de maillage voxel stocke explicitement les propriétés de la scène (par exemple, la densité, la couleur RVB ou les caractéristiques) dans ses sommets de maillage pour prendre en charge des requêtes de fonctionnalités efficaces. De cette façon, pour une position 3D donnée, nous pouvons décoder l'attribut correspondant via interpolation trilinéaire :
 avant-plan
avant-plan
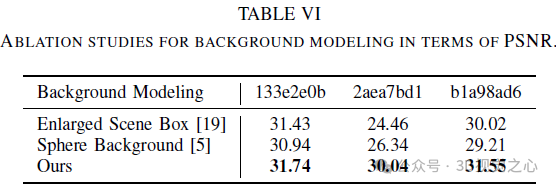
Contexte Bien que la modélisation de premier plan mentionnée précédemment fonctionne pour les champs de rayonnement au niveau des objets, l'étendre à des scènes extérieures illimitées n'est pas triviale. Certaines techniques connexes, telles que NGP, étendent directement leur cadre de délimitation de scène afin que la zone d'arrière-plan puisse être incluse, tandis que GANcraft et URF introduisent un rayonnement de fond sphérique pour résoudre ce problème. Cependant, la première tentative a entraîné un gaspillage de ses fonctionnalités puisque la majeure partie de la zone de sa zone de scène était utilisée pour la scène d'arrière-plan. Pour ce dernier schéma, il peut ne pas être capable de gérer des panoramas complexes dans des scènes urbaines (par exemple des bâtiments vallonnés ou des paysages complexes) car il suppose simplement que le rayonnement de fond dépend uniquement de la direction de la vue.
Pour cela, nous avons mis en place un modèle de maillage d'arrière-plan supplémentaire pour maintenir constante la résolution de la partie de premier plan. Nous adoptons le paramétrage de scène dans [9] comme arrière-plan, qui est soigneusement conçu. Premièrement, contrairement à la modélisation sphérique inverse, nous utilisons une modélisation cubique inverse, de norme ℓ∞, puisque nous utilisons une représentation en grille de voxels. Deuxièmement, nous n'instancions pas de MLP supplémentaire pour interroger la couleur d'arrière-plan afin d'économiser de la mémoire. Plus précisément, nous déformons les points d'arrière-plan 3D en 4D via :

Initialisation LiDAR
en utilisant notre représentation de scène hybride, qui nécessite beaucoup de calculs lorsque nous partons directement d'une représentation de grille de voxels efficace. Ce modèle économise les calculs et la mémoire lors du MLP. interroge les valeurs de densité. Cependant, étant donné la nature à grande échelle et la complexité des scènes urbaines, cette représentation légère peut facilement rester bloquée dans des minima locaux lors de l'optimisation en raison de la résolution limitée de la grille de densité. Heureusement, en conduite autonome, la plupart des véhicules autonomes (SDV) sont équipés de capteurs LiDAR, qui fournissent des a priori géométriques approximatifs pour la reconstruction de la scène. À cette fin, nous proposons d'utiliser des nuages de points lidar pour initialiser notre maillage de densité afin de lever les obstacles d'une optimisation conjointe de la géométrie de la scène et de la radioactivité.
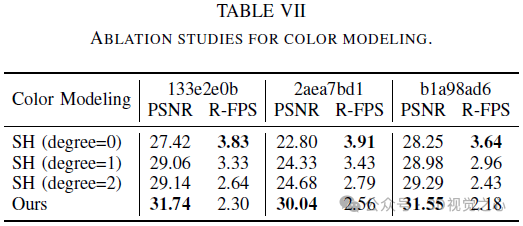
Décomposition des couleurs
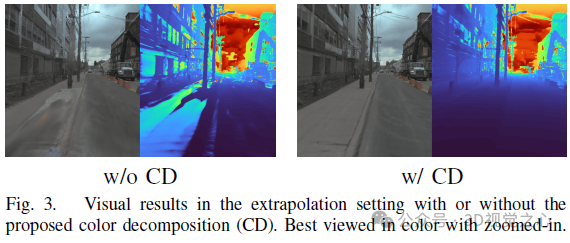
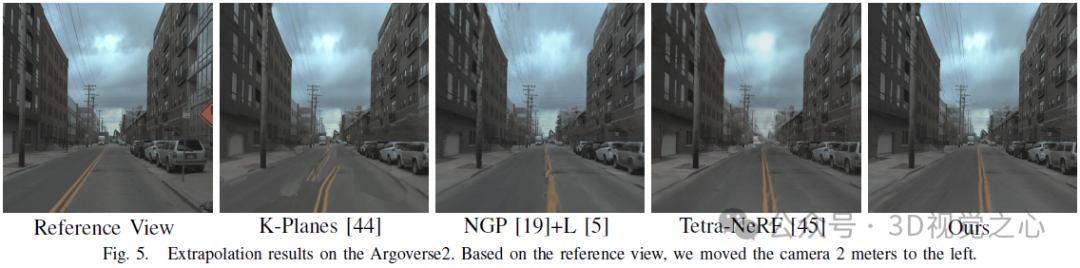
Le NeRF original utilisait un MLP dépendant de la vue pour modéliser la couleur dans le champ de rayonnement, une simplification du monde physique où le rayonnement se compose d'une couleur diffuse (indépendante de la vue) et d'une couleur spéculaire (liée à la vue). composition. De plus, étant donné que la couleur de sortie finale c est complètement liée à la direction de visualisation d, il est difficile de restituer des images haute fidélité dans des vues invisibles. Comme le montre la figure 3, notre méthode entraînée sans décomposition des couleurs (CD) échoue lors de la synthèse d'une nouvelle vue dans le paramètre d'extrapolation (c'est-à-dire en décalant la direction de visualisation de 2 mètres vers la gauche en fonction de la vue d'entraînement), tandis que notre méthode en couleur. le cas donne des résultats de rendu raisonnables.

La couleur finale à l'emplacement échantillonné est la somme de ces deux facteurs :

Perte d'entraînement
Nous modifions la perte photométrique à l'aide de poids redimensionnés pour optimiser notre modèle, faites-le concentrez-vous sur des échantillons durs pour obtenir une convergence rapide. Le coefficient de poids est défini comme suit :


 photos
photos


Expérience
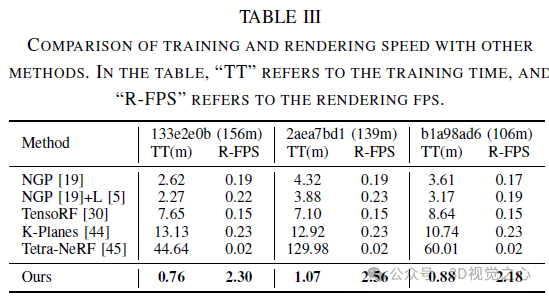
Conclusion
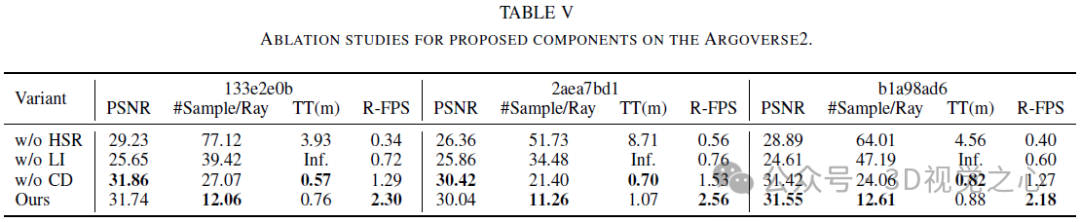
Cet article présente Lightning NeRF, un cadre de synthèse de vues de scènes extérieures efficace qui intègre des nuages de points et des images. La méthode proposée exploite les nuages de points pour initialiser rapidement une représentation clairsemée de la scène, obtenant ainsi des améliorations significatives en termes de performances et de vitesse. En modélisant l'arrière-plan plus efficacement, nous réduisons la pression de représentation au premier plan. Enfin, grâce à la décomposition des couleurs, les couleurs liées à la vue et indépendantes de la vue sont modélisées séparément, ce qui améliore la capacité d'extrapolation du modèle. Des expériences approfondies sur divers ensembles de données de conduite autonome démontrent que notre méthode surpasse les techniques de pointe précédentes en termes de performances et d'efficacité.
Ce qui précède est le contenu détaillé de. pour plus d'informations, suivez d'autres articles connexes sur le site Web de PHP en chinois!
Articles Liés
Voir plus- De la science-fiction à la réalité, quels sont les problèmes encore rencontrés dans le développement de la conduite autonome ?
- Huawei Cloud et un certain nombre d'entreprises ont lancé une initiative d'action : construire conjointement un écosystème industriel ouvert pour la conduite autonome
- Tesla utilise l'intelligence artificielle pour améliorer la conduite autonome
- Waymo et Uber remodèlent leur partenariat pour explorer conjointement l'application de la technologie de conduite autonome dans le domaine du covoiturage en ligne
- Fengmi Laser TV se classe premier en Chine en termes de ventes en ligne lors du Double 11 pendant 6 années consécutives