
Maison >Tutoriel système >Linux >Cadre de pilote de périphérique de caractères Linux : principes et méthodes
Cadre de pilote de périphérique de caractères Linux : principes et méthodes

- PHPzavant
- 2024-02-09 21:06:14750parcourir
Les périphériques à caractères sont un type de périphérique courant dans les systèmes Linux. Ils transmettent des données en octets, tels que le clavier, la souris, le port série, etc. Le pilote de périphérique de caractère est le type le plus basique de développement de pilote Linux. Il implique des concepts tels que le numéro de périphérique, le fichier de périphérique, la structure des opérations de fichier et la structure cdev. Dans cet article, nous présenterons les principes et les méthodes du cadre de pilote de périphérique de caractères Linux, y compris l'enregistrement et la désenregistrement des numéros de périphérique, la création et la suppression de fichiers de périphérique, l'initialisation et la libération des structures cdev, la mise en œuvre et l'enregistrement des fonctions d'opération de fichiers, etc., et donner des exemples pour illustrer leur utilisation et leurs précautions.
Modèle de pilote
Tout sous Linux est un fichier, donc en tant que fichier de périphérique, son interface de méthode de fonctionnement est encapsulée dans struct file_operations Lorsque nous écrivons un pilote, nous devons implémenter l'interface correspondante pour que le pilote puisse être largement utilisé sous Linux. noyau." Le mécanisme d'enregistrement + rappel est utilisé pour écrire des pilotes. Le soi-disant rappel d'enregistrement, une compréhension simple est que lorsque nous ouvrons un fichier de périphérique, nous trouvons en fait l'inode correspondant via VFS et exécutons l'enregistrement dans l'inode lorsque nous avons créé le fichier de périphérique auparavant. La fonction d'ouverture est la même que les autres fonctions. Par conséquent, pour que le pilote que nous écrivons soit normalement utilisé par l'application, la première chose à faire est d'implémenter la méthode correspondante, puis de créer la méthode correspondante. fichier de périphérique.
#include //for struct cdev
#include
//for struct file
#include //for copy_to_user
#include
//for error number
static int ma = 0;
static int mi = 0;
const int count = 3;
/* 准备操作方法集 */
/*
struct file_operations {
struct module *owner; //THIS_MODULE
//读设备
ssize_t (*read) (struct file *, char __user *, size_t, loff_t *);
//写设备
ssize_t (*write) (struct file *, const char __user *, size_t, loff_t *);
//映射内核空间到用户空间
int (*mmap) (struct file *, struct vm_area_struct *);
//读写设备参数、读设备状态、控制设备
long (*unlocked_ioctl) (struct file *, unsigned int, unsigned long);
//打开设备
int (*open) (struct inode *, struct file *);
//关闭设备
int (*release) (struct inode *, struct file *);
//刷新设备
int (*flush) (struct file *, fl_owner_t id);
//文件定位
loff_t (*llseek) (struct file *, loff_t, int);
//异步通知
int (*fasync) (int, struct file *, int);
//POLL机制
unsigned int (*poll) (struct file *, struct poll_table_struct *);
。。。
};
*/
ssize_t myread(struct file *filep, char __user * user_buf, size_t size, loff_t* offset)
{
return 0;
}
struct file fops = {
.owner = THIS_MODULE,
.read = myread,
...
};
/* 字符设备对象类型
struct cdev {
struct kobject kobj;
struct module *owner; //模块所有者(THIS_MODULE),用于模块计数
const struct file_operations *ops; //操作方法集(分工:打开、关闭、读/写、...)
struct list_head list;
dev_t dev; //设备号(第一个)
unsigned int count; //设备数量
};
*/
static int __init chrdev_init(void)
{
...
/* 构造cdev设备对象 */
struct cdev *cdev_alloc(void);
/* 初始化cdev设备对象 */
void cdev_init(struct cdev*, const struct file_opeartions*);
/* 申请设备号,静态or动态*/
/* 为字符设备静态申请第一个设备号 */
int register_chrdev_region(dev_t from, unsigned count, const char* name);
/* 为字符设备动态申请第一个设备号 */
int alloc_chrdev_region(dev_t* dev, unsigned baseminor, unsigned count, const char* name);
ma = MAJOR(dev) //从dev_t数据中得到主设备号
mi = MINOR(dev) //从dev_t数据中得到次设备号
MKDEV(ma,1) //将主设备号和次设备号组合成设备号,多用于批量创建/删除设备文件
/* 注册字符设备对象cdev到内核 */
int cdev_add(struct cdev* , dev_t, unsigned);
...
}
static void __exit chrdev_exit(void)
{
...
/* cdev_del()、cdev_put()二选一 */
/* 从内核注销cdev设备对象 */
void cdev_del(struct cdev* );
/* 从内核注销cdev设备对象 */
void cdev_put(stuct cdev *);
/* 回收设备号 */
void unregister_chrdev_region(dev_t from, unsigned count);
...
}
Un mot, si vous utilisez une application statique pour les numéros de périphérique, le plus gros problème est de ne pas entrer en conflit avec les numéros de périphérique connus. Le noyau a déjà noté quels sont les principaux numéros de périphérique figurant dans le document **"Documentation/devices.txt"**. utilisé. On peut voir à partir de cela que parmi les 2 ^ 12 numéros de périphérique principaux, la plage que nous pouvons utiliser est 240-255 et 261-2 ^ 12-1. Cela peut également expliquer pourquoi lorsque nous appliquons dynamiquement, la raison pour laquelle le. le numéro d’appareil est souvent 250. De plus, grâce à ce fichier, nous pouvons également voir que « le numéro majeur de périphérique représente un type de périphérique », mais les périphériques caractères/blocs eux-mêmes peuvent être divisés en plusieurs catégories, de sorte que le noyau attribue un numéro de périphérique majeur à chaque catégorie. 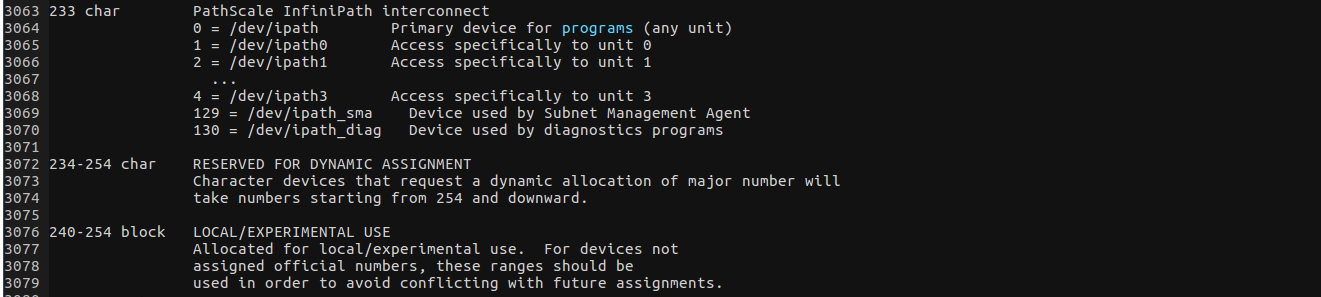
Implémenter la lecture et l'écriture
Chaque processus sous Linux possède son propre espace de processus indépendant. Même si les données du noyau sont mappées sur un processus utilisateur, le PID des données sera automatiquement converti en PID du processus utilisateur. ne peut pas directement Les données sont copiées depuis l'espace noyau et l'espace utilisateur, et des fonctions/maros de copie de données spéciaux sont requis :
long copy_from_user(void *to, const void __user * from, unsigned long n) long copy_to_user(void __user *to, const void *from, unsigned long n)
Ces deux fonctions peuvent copier les données dans l'espace du noyau vers l'espace de processus utilisateur du processus utilisateur qui rappelle la fonction. Avec ces deux fonctions, la lecture et l'écriture dans le noyau peuvent réaliser la copie des données entre l'espace du noyau et le. espace utilisateur.
ssize_t myread(struct file *filep, char __user * user_buf, size_t size, loff_t* offset)
{
long ret = 0;
size = size > MAX_KBUF?MAX_KBUF:size;
if(copy_to_user(user_buf, kbuf,size)
return -EAGAIN;
}
return 0;
}
Implémenter ioctl
ioctl est une interface d'appel système spécialement conçue par Linux pour les appareils de contrôle au niveau utilisateur. Cette interface a une grande flexibilité. Les fonctions que notre appareil entend permettre aux utilisateurs d'atteindre via des commandes peuvent être implémentées via elle. le pointeur de fonction correspondant est long (*unlocked_ioctl) (struct file *, unsigned int, unsigned long);, où les commandes et les paramètres sont entièrement spécifiés par le pilote. Habituellement, la commande sera écrite dans un fichier d'en-tête pour garantir que la couche application et la couche pilote sont conformes au même protocole de communication que Linux recommande de définir ioctl. montré sur la figure) ) commande
设备类型 序列号 方向 数据尺寸 8bit 8bit 2bit 13/14bit
“
设备类型字段为一个幻数,可以是0~0xff之间的数,内核中的”ioctl-number.txt“给出了一个推荐的和已经被使用的幻数(但是已经好久没人维护了),新设备驱动定义幻数的时候要避免与其冲突。
序列号字段表示当前命令是整个ioctl命令中的第几个,从1开始计数。
方向字段为2bit,表示数据的传输方向,可能的值是:**_IOC_NONE,_IOC_READ,_IOC_WRITE和_IOC_READ|_IOC_WRITE**。
数据尺寸字段表示涉及的用户数据的大小,这个成员的宽度依赖于体系结构,通常是13或14位。”
内核还定义了**_IO(),_IOR(),_IOW(),_IOWR()**这4个宏来辅助生成这种格式的命令。这几个宏的作用是根据传入的type(设备类型字段),nr(序列号字段)和size(数据长度字段)和方向字段移位组合生成命令码。
内核中还预定义了一些I/O控制命令,如果某设备驱动中包含了与预定义命令一样的命令码,这些命令会被当做预定义命令被内核处理而不是被设备驱动处理,有如下4种:
- FIOCLEX:即file ioctl close on exec 对文件设置专用的标志,通知内核当exec()系统带哦用发生时自动关闭打开的文件
- FIONCLEX:即file ioctl not close on exec,清除由FIOCLEX设置的标志
- FIOQSIZE:获得一个文件或目录的大小,当用于设备文件时,返回一个ENOTTY错误
- FIONBIO:即file ioctl non-blocking I/O 这个调用修改flip->f_flags中的O_NONBLOCK标志
实例
//mycmd.h
...
#include
#define CMDT 'A'
#define KARG_SIZE 36
struct karg{
int kval;
char kbuf[KARG_SIZE];
};
#define CMD_OFF _IO(CMDT,0)
#define CMD_ON _IO(CMDT,1)
#define CMD_R
_IOR(CMDT,2,struct karg)
#define CMD_W _IOW(CMDT,3,struct karg)
...
//chrdev.c
static long demo_ioctl(struct file *filp, unsigned int cmd, unsigned long arg)
{
static struct karg karg = {
.kval = 0,
.kbuf = {0},
};
struct karg *usr_arg;
switch(cmd){
case CMD_ON:
/* 开灯 */
break;
case CMD_OFF:
/* 关灯 */
break;
case CMD_R:
if(_IOC_SIZE(cmd) != sizeof(karg)){
return -EINVAL;
}
usr_arg = (struct karg *)arg;
if(copy_to_user(usr_arg, &karg, sizeof(karg))){
return -EAGAIN;
}
break;
case CMD_W:
if(_IOC_SIZE(cmd) != sizeof(karg)){
return -EINVAL;
}
usr_arg = (struct karg *)arg;
if(copy_from_user(&karg, usr_arg, sizeof(karg))){
return -EAGAIN;
}
break;
default:
;
};
return 0;
}
创建设备文件
插入的设备模块,我们就可以使用cat /proc/devices命令查看当前系统注册的设备,但是我们还没有创建相应的设备文件,用户也就不能通过文件访问这个设备。设备文件的inode应该是包含了这个设备的设备号,操作方法集指针等信息,这样我们就可以通过设备文件找到相应的inode进而访问设备。创建设备文件的方法有两种,手动创建或自动创建,手动创建设备文件就是使用mknod /dev/xxx 设备类型 主设备号 次设备号的命令创建,所以首先需要使用cat /proc/devices查看设备的主设备号并通过源码找到设备的次设备号,需要注意的是,理论上设备文件可以放置在任何文件加夹,但是放到**”/dev”才符合Linux的设备管理机制,这里面的devtmpfs是专门设计用来管理设备文件的文件系统。设备文件创建好之后就会和创建时指定的设备绑定,即使设备已经被卸载了,如要删除设备文件,只需要像删除普通文件一样rm**即可。理论上模块名(lsmod),设备名(/proc/devices),设备文件名(/dev)并没有什么关系,完全可以不一样,但是原则上还是建议将三者进行统一,便于管理。
除了使用蹩脚的手动创建设备节点的方式,我们还可以在设备源码中使用相应的措施使设备一旦被加载就自动创建设备文件,自动创建设备文件需要我们在编译内核的时候或制作根文件系统的时候就好相应的配置:
Device Drivers ---> Generic Driver Options ---> [*]Maintain a devtmpfs filesystem to mount at /dev [*] Automount devtmpfs at /dev,after the kernel mounted the rootfs
OR
制作根文件系统的启动脚本写入
mount -t sysfs none sysfs /sys mdev -s //udev也行
有了这些准备,只需要导出相应的设备信息到**”/sys”**就可以按照我们的要求自动创建设备文件。内核给我们提供了相关的API
class_create(owner,name); struct device *device_create_vargs(struct class *cls, struct device *parent,dev_t devt, void *drvdata,const char *fmt, va_list vargs); void class_destroy(struct class *cls); void device_destroy(struct class *cls, dev_t devt);
有了这几个函数,我们就可以在设备的**xxx_init()和xxx_exit()**中分别填写以下的代码就可以实现自动的创建删除设备文件
/* 在/sys中导出设备类信息 */ cls = class_create(THIS_MODULE,DEV_NAME); /* 在cls指向的类中创建一组(个)设备文件 */ for(i= minor;i"%s%d",DEV_NAME,i); } /* 在cls指向的类中删除一组(个)设备文件 */ for(i= minor;i
通过本文,我们了解了Linux字符设备驱动框架的原理和方法,它们可以用来实现对字符设备的驱动和控制。我们应该根据实际需求选择合适的方法,并遵循一些基本原则,如使用静态或动态分配的设备号,使用标准或自定义的设备文件名,使用正确或简化的cdev初始化方式等。字符设备驱动框架是Linux驱动开发中最重要的一部分,它可以实现对字符设备的读写操作,也可以提升驱动程序的可移植性和可维护性。希望本文能够对你有所帮助和启发。
Ce qui précède est le contenu détaillé de. pour plus d'informations, suivez d'autres articles connexes sur le site Web de PHP en chinois!