
Maison >Périphériques technologiques >IA >MapNeXt basé sur le cloud et basé sur la voiture est terminé ! Construction de cartes en ligne de haute précision de nouvelle génération
MapNeXt basé sur le cloud et basé sur la voiture est terminé ! Construction de cartes en ligne de haute précision de nouvelle génération

- WBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBavant
- 2024-01-31 18:06:111006parcourir
Écrit ci-dessus et compréhension personnelle de l'auteur
Dans la mobilité collaborative, connectée et automatisée (CCAM), plus la capacité des véhicules à conduite intelligente à percevoir, modéliser et analyser l'environnement environnant est forte, plus ils sont conscients et capables de comprendre, prendre des décisions et exécuter des scénarios de conduite complexes en toute sécurité et efficacement. Les cartes de haute précision (HD) représentent les environnements routiers avec une précision centimétrique et des informations sémantiques au niveau des voies, ce qui en fait un composant essentiel des systèmes de mobilité intelligents et un élément clé de la technologie CCAM. Ces cartes offrent aux véhicules automatisés un puissant avantage dans la compréhension de leur environnement. Les cartes HD sont également considérées comme des capteurs cachés ou virtuels car elles rassemblent les connaissances des capteurs physiques (cartes), à savoir le lidar, les caméras, le GPS et l'IMU, pour construire un modèle de l'environnement routier. Les cartes HD évoluent rapidement vers des représentations holistiques de l'infrastructure numérique des villes intelligentes, incluant non seulement la géométrie des routes et les informations sémantiques, mais également des mises à jour sur la perception en temps réel des usagers de la route, des conditions météorologiques, des zones de travaux et des incidents. Le déploiement à grande échelle de véhicules autonomes nécessite que ces cartes soient construites et entretenues par une grande flotte de véhicules qui travaillent ensemble pour mettre à jour en permanence les cartes afin que les véhicules autonomes de la flotte puissent fonctionner correctement. Cet article fournit un examen approfondi des diverses applications de ces cartes dans les systèmes de conduite hautement automatisée (AD). Nous passons systématiquement en revue les avancées récentes dans différentes méthodes et algorithmes pour construire et maintenir des cartes de haute précision. Les exigences en matière de données, de communications et d'infrastructures pour la distribution de cartes HD sont également discutées et synthétisées. Enfin, les défis actuels sont passés en revue et les orientations futures de la recherche pour les systèmes de cartographie numérique de nouvelle génération sont discutées.
Histoire du développement de cartes HD
A. Cartes numériques
L'émergence des systèmes satellitaires modernes et de la technologie d'imagerie a révolutionné la création de représentations numériques précises et détaillées du monde, produisant ce que nous appelons aujourd'hui Cartes numériques telles que Google Maps, OpenStreetMap, Apple Maps, Garmin et Mapbox. Les cartes numériques codent la structure routière et les informations sémantiques de base ainsi que les points d'intérêt (POI). Il existe plusieurs méthodes et techniques pour extraire et identifier les caractéristiques géographiques nécessaires à la construction de ces cartes à partir d'images satellite. Les cartes numériques sont désormais un outil essentiel dans notre vie quotidienne, notamment lorsqu'elles sont intégrées au GPS. En fait, cette intégration a été un élément essentiel dans la création d’un grand nombre de services numériques, notamment la navigation et le routage. Développées principalement pour aider les humains, ces cartes sont désormais disponibles dans les derniers véhicules pour aider les conducteurs humains. Cependant, ces cartes sont limitées en termes d'exactitude et de précision ainsi que du temps de mise à jour requis par AD, où les véhicules nécessitent un certain degré de précision de localisation ainsi que des informations détaillées au niveau des voies.
B. Carte numérique améliorée
La carte numérique a été considérablement améliorée pour répondre aux exigences des fonctionnalités du système avancé d'aide à la conduite (ADAS) telles que l'assistance au maintien de voie et le régulateur de vitesse adaptatif (ACC). Les fonctionnalités typiques de ces cartes numériques améliorées incluent les limites de vitesse, la courbure et la pente de la route, les informations sur les voies, ainsi que les panneaux de signalisation et les feux de circulation. Les cartes numériques améliorées, également connues sous le nom de cartes ADAS, font désormais partie intégrante de la plupart des véhicules modernes, permettant ainsi la fonctionnalité ADAS. Bien que les cartes numériques améliorées introduisent des informations au niveau des voies, leur précision géométrique et leur niveau de détail sémantique limitent leur applicabilité à des niveaux d’autonomie plus élevés. Dans les systèmes AD, les véhicules doivent se positionner avec une grande précision par rapport à leur environnement, comprendre la situation actuelle et planifier des trajectoires sans collision. Pour atteindre ce niveau d’autonomie, les véhicules automatisés doivent acquérir non seulement des cartes avec une précision de position centimétrique et des informations géométriques au niveau de la voie, mais également un modèle 3D de l’environnement, avec toutes les caractéristiques statiques et dynamiques de l’environnement routier.
C. Carte de haute précision
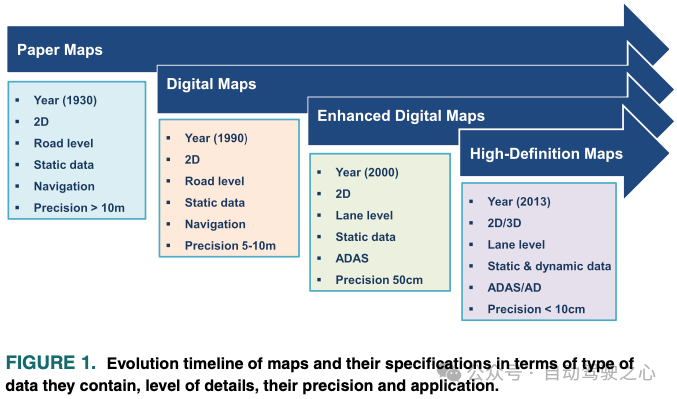
Il est nécessaire de générer des cartes de haute précision, ou des cartes de haute précision, pour répondre aux exigences ci-dessus. La figure 1 illustre l'évolution, les caractéristiques et les utilisations de la carte, ainsi que les informations, la précision et le niveau de détail qu'elle contient.
D. Cartes évolutives : aperçu
Au cours de la dernière décennie, le monde universitaire et l'industrie ont repoussé les limites des cartes haute définition pour qu'elles soient abordables, auto-entretenues et évolutives grâce à des efforts massifs de recherche et de développement. . Cependant, il reste encore des problèmes non résolus dans la création de cartes HD à grande échelle, qui entravent le plein potentiel et l'objectif ultime des cartes HD, à savoir permettre la mobilité autonome. Ces défis peuvent être divisés dans les catégories suivantes.
- 1) Collecte de données : la collecte de données pour les cartes HD peut être un processus long et laborieux. Cela implique généralement l’utilisation d’une combinaison de capteurs tels que le GPS, l’IMU, le lidar et les caméras pour collecter des informations détaillées sur l’environnement.
- 2) Communication de données : La communication de données comprend la transmission de données cartographiques du lieu de collecte au lieu de traitement pour construire une carte de haute précision, et enfin au lieu de consommation, comme les voitures autonomes. Les véhicules de cartographie génèrent de grandes quantités de données provenant de différents capteurs, qui doivent être traitées pour créer et mettre à jour des cartes. Traiter ces données provenant d’un grand nombre de véhicules cartographiques en temps réel constitue en effet un défi.
- 3) Traitement des données : Le traitement des données est l'étape de création d'une carte de haute précision en extrayant les éléments et caractéristiques nécessaires pour construire une carte de haute précision. Cela peut s'avérer une tâche très complexe, en particulier pour les grandes cartes, car elle implique de regrouper et d'aligner des données provenant de plusieurs sources et de garantir que la carte est précise et à jour. Lorsqu’un grand nombre de véhicules de cartographie sont impliqués dans le processus de cartographie, une synchronisation temporelle précise doit être assurée pour éviter un mauvais alignement des données. La synchronisation à l'aide de signaux d'impulsions par seconde (PPS) générés par le GPS tend à être la méthode la plus courante de synchronisation de tous les capteurs embarqués.
- 4) Maintenance des cartes : la maintenance des cartes fait référence au processus de mise à jour continue de cartes de haute précision en fonction des changements dans l'environnement routier, tels que les chantiers de construction, les barrages routiers et les modifications des liaisons routières. L’environnement routier étant très dynamique et sujet à changement, ce processus nécessite des efforts fréquents de collecte et de traitement des données.
- 5) Confidentialité et sécurité des données : La sécurité et la confidentialité des données sont essentielles aux cartes HD car elles contiennent souvent des informations sensibles telles que l'emplacement des bâtiments et des infrastructures. Veiller à ce que ces données soient protégées et non utilisées à mauvais escient constitue un défi majeur.
- 6) Coût de la cartographie : dans le processus de création de cartes de haute précision, le coût de la carte est un facteur important. La cartographie à grande échelle nécessite l'utilisation d'un grand nombre de véhicules de cartographie, chacun équipé d'un ensemble d'équipements de cartographie coûteux dotés de capteurs de haute précision. Ce coût devient important lors de la cartographie de vastes zones. Une cartographie de haute précision est possible à l'aide de capteurs grand public, mais cela se fait au détriment de l'utilisation d'algorithmes de cartographie complexes.
E. Principales contributions
Cet article fournit un aperçu approfondi des cartes HD, y compris un modèle unifié de son architecture en couches. Dans le même temps, l'importance des cartes de haute précision dans le système AD modulaire est soulignée et leur utilisation dans diverses fonctions principales d'AD est synthétisée. Cet article fournit un examen approfondi des défis liés à la collecte, à la communication, au traitement, à la sécurité et aux coûts des données cartographiques, y compris des solutions rentables et les exigences en matière de communication et de données cartographiques, de la génération à la distribution. De plus, les défis actuels liés à la création et à la maintenance de cartes HD sont abordés. Enfin, quelques inspirations sont fournies pour les cartes mobiles de haute précision futures et de nouvelle génération. Pour résumer les principales contributions :
- Un aperçu autonome des cartes HD en tant que contexte pour la communauté plus large des systèmes de transport intelligents.
- Un examen détaillé des technologies les plus avancées utilisées par les cartes HD dans diverses fonctions essentielles du système AD.
- Enquête complète sur les différentes approches, méthodes et algorithmes pour maintenir les cartes HD à différents niveaux et les maintenir à jour.
- Discutez des principaux défis et perspectives d'avenir des cartes HD dans l'administration générale et au-delà.
Cartes HD : aperçu
Les premières cartes HD ne sont qu'une extension des cartes numériques améliorées utilisées dans ADAS, elles sont appelées premières cartes. Le terme HD Maps n'est apparu que récemment, mais il est désormais largement accepté par l'industrie CCAM, y compris les constructeurs automobiles de premier plan, les fournisseurs de cartes et les équipementiers. Les cartes HD encapsulent toutes les informations nécessaires aux véhicules automatisés pour comprendre l'environnement de conduite avec une très grande précision. Bien qu'il soit généralement admis que les cartes HD sont les principaux outils du CCAM, il n'existe pas de lignes directrices ou de normes claires quant aux informations qui constituent des cartes HD et à la manière de représenter ces informations. Néanmoins, les cartes HD disponibles sur le marché partagent des caractéristiques communes. La précision de la position au centimètre près et la disponibilité d'informations géométriques et sémantiques au niveau des voies sont des caractéristiques essentielles de la plupart des cartes HD. À son niveau le plus élémentaire, une carte HD peut simplement être un ensemble de points et de segments de ligne dont les emplacements exacts représentent les panneaux routiers, les marquages au sol, les limites de voies et les séparateurs de voies. En raison des exigences des systèmes AD, les cartes de haute précision actuelles deviennent de plus en plus complexes et les données provenant de différentes sources constituent de multiples couches d'informations sur l'environnement de conduite. La décomposition des cartes HD en plusieurs couches permet une représentation des données plus structurée de l'environnement routier. Cela facilite l'accessibilité aux différents composants du système AD, qui nécessitent que l'environnement soit modélisé à différents niveaux de détail. De plus, la représentation hiérarchique des données facilite la construction, le stockage, la récupération et la maintenance des cartes. Des exemples de ces couches sont donnés dans la figure 2.
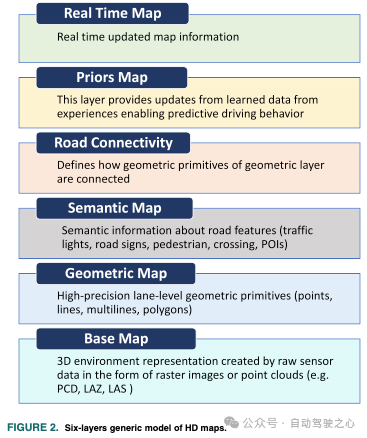
Comme mentionné ci-dessus, il existe plusieurs façons de représenter les informations cartographiques utilisées dans les systèmes AD, y compris les détails au niveau des voies tels que les limites des voies, les types de marquage des voies, les sens de circulation, les passages pour piétons, les polygones de zones carrossables et les annotations d'intersection. Bien que l’environnement de conduite soit très dynamique, les données représentées dans ces trois couches sont statiques. La représentation globale de l'environnement doit également inclure des informations de trafic en temps réel sur les vitesses observées, les conditions météorologiques, les zones de congestion, les zones de blocage routier (construction), etc. Cette section tente de fournir un aperçu global des informations stockées dans ces couches de manière unifiée. Bien que la plupart des fournisseurs de cartes HD aient leurs propres définitions et formats, et qu'il n'existe pas de norme unique pour les cartes HD, nous divisons les informations contenues dans les cartes HD en six couches différentes, comme le montre la figure 2.
A. Couche de carte de base
La couche de carte de base est la base de la carte HD et est considérée comme la couche de référence à partir de laquelle toutes les autres couches sont construites. Il contient une représentation géospatiale tridimensionnelle très précise de l'environnement, telle que l'emplacement et la forme des routes, des bâtiments et d'autres structures. Les modèles géospatiaux tridimensionnels des environnements routiers deviennent une source d’informations importante pour les véhicules autonomes. Aujourd’hui, les cartes HD contiennent souvent des représentations tridimensionnelles de l’environnement. Les couches de carte de base sont généralement créées à l'aide de nuages de points provenant du lidar et/ou d'images provenant d'une ou plusieurs caméras, parfois avec l'aide du GPS/IMU. Cette suite de capteurs forme un MMS qui crée un nuage de points 3D très précis et détaillé représentant l'environnement. Les caractéristiques géométriques et sémantiques des routes et des voies sont extraites de cette couche pour créer d'autres couches dans la carte HD. Parce que cette couche contient une représentation dense des données de l’environnement, elle joue un rôle crucial dans la localisation précise des véhicules autonomes. Plusieurs techniques d'enregistrement des nuages de points permettent d'estimer la pose du véhicule en faisant correspondre les données brutes du capteur au nuage de points de cette couche. La construction et la mise à jour de cette couche constituent un défi en termes de besoins en matière de traitement des données et de communication.
B. Couche de géométrie
Bien que la couche de carte de base fournisse une représentation précise et dense de l'environnement, sa capacité à prendre en charge la compréhension de l'environnement est limitée en raison du manque de fonctionnalités significatives dans sa représentation. Les couches géométriques des cartes HD fournissent des informations détaillées sur la géométrie de l'environnement routier, notamment l'emplacement et la forme des routes, des voies, des bordures et d'autres caractéristiques. La couche géométrique comprend généralement des informations sur la largeur de la route, le nombre de voies, la ligne médiane de chaque voie, les limites des voies de chaque route et l'élévation de la surface de la route. Il comprend également des informations sur l'emplacement précis et la forme des bordures, des trottoirs, des passages pour piétons et des panneaux de signalisation verticaux et horizontaux. Chacune de ces entités est représentée par des primitives géométriques de base, à savoir des points, des lignes, des polylignes et des polygones. Par exemple, l'emplacement d'un panneau de signalisation vertical peut être représenté par un point. L'axe ou la limite d'une voie peut être représentée par un ensemble de segments de ligne interconnectés, comme une polyligne. De même, un passage pour piétons peut être représenté par un polygone. Les entités géométriques de cette couche sont créées en traitant les données de la couche de carte de base. La création d'une couche géométrique à partir de données cartographiques de base implique généralement plusieurs étapes de traitement, notamment la segmentation des routes, l'extraction des informations sur les voies, les panneaux de signalisation, les poteaux, les panneaux de signalisation, les bordures, les obstacles et les caractéristiques de la chaussée. Cette couche fournit une représentation géométrique très précise des caractéristiques routières au niveau de la voie. Les caractéristiques géométriques des cartes HD sont cruciales pour divers composants de base de l'AD, notamment la prévision précise des mouvements des usagers dynamiques de la route et la planification sûre de trajectoires géométriquement réalisables.
C. Couche de carte sémantique
La couche de carte sémantique définit l'importance des caractéristiques routières fournies par la couche de carte géométrique. Les données de cette couche fournissent un contexte et une signification aux entités représentées sur la carte. Par exemple, une couche de carte sémantique dans une carte HD contient des informations telles que le type de route (par exemple, autoroute, route résidentielle) et les voies (par exemple, peuvent changer vers la gauche ou la droite), leurs numéros, le sens de la circulation et si la voie est ou non. utilisé pour tourner ou pour tourner Informations sur le stationnement. Il comprend également des informations sur les limites de vitesse, les limites de voies, les intersections, les passages pour piétons, les panneaux de signalisation, les feux de circulation, les places de stationnement, les arrêts de bus et de nombreuses autres caractéristiques importantes pour construire des représentations contextuelles de l'environnement. La couche de carte sémantique permet aux véhicules autonomes de construire des représentations situationnelles détaillées de leur environnement et de comprendre les règles de circulation, leur permettant ainsi de prendre des décisions correctes et sûres dans différents scénarios de circulation. En termes simples, la couche de carte sémantique attribue des étiquettes sémantiques aux caractéristiques routières et aux objets définis dans la carte géométrique. Par exemple, un point dans une couche géométrique n’est rien de plus qu’un ensemble ordonné de coordonnées dans un système de référence de coordonnées cartographiques. Seule la couche sémantique définit si le point correspond à un feu tricolore, un panneau Cédez le passage ou un panneau stop. Comme nous le savons tous, les cartes de haute précision contiennent de riches informations sémantiques. La couche sémantique associe également des métadonnées aux caractéristiques routières telles que la courbure de la route, la vitesse de conduite recommandée et des identifiants uniques pour chaque caractéristique sémantique. En fait, des cartes HD sémantiquement riches permettent aux voitures autonomes de mieux comprendre la situation de conduite et de prendre des décisions complexes dans des scénarios complexes. Cependant, construire des graphes sémantiques fiables et de haute fidélité des environnements routiers n’est pas un processus simple. Plusieurs étapes de traitement sont nécessaires, sans se limiter à la segmentation de scène, à la détection d'objets, à la classification, à l'estimation de pose et à la cartographie. Grâce aux progrès récents en matière de vision par ordinateur, d’apprentissage profond, de fusion de capteurs et d’algorithmes sémantiques SLAM, il est possible de créer des graphiques sémantiques précis.
D. Couche de connexion routière
La couche de connexion routière décrit la topologie du réseau routier et la manière dont les différents éléments géométriques sont connectés. Contrairement à la définition standard d'une carte numérique, qui contient uniquement des informations au niveau de la route et des connexions au niveau de la route, les cartes HD contiennent des informations géométriques et sémantiques au niveau des voies, de sorte que les connexions entre les routes deviennent complexes car elles définissent deux ou plusieurs ensembles de voies. .les connexions entre. Plus précisément, cette couche fournit le tracé et la connectivité de la route, y compris les limites des voies, les axes centraux et les intersections. Les informations sur la connectivité au niveau des voies sont nécessaires pour planifier les transitions légales entre les routes et les voies et pour planifier les opérations autorisées à chaque intersection, ce qui est essentiel pour la planification des trajets pour les véhicules autonomes. En termes simples, cette couche définit la manière dont les primitives qui composent la couche géométrique sont connectées les unes aux autres. Ces connexions sont établies en définissant des paires séquentielles d'éléments géométriques et sémantiques. L'attribution d'un identifiant unique à chaque élément géométrique et sémantique permet la représentation de ces informations à l'aide de structures de données graphiques, où chaque élément est représenté par une arête et leurs connexions sous forme de nœuds. La structure graphique permet une interrogation et une recherche rapides de la carte et une planification d'itinéraire efficace.
E. Couche de carte antérieure
Cette couche est également appelée couche de carte antérieure car elle représente et apprend les informations de l'expérience passée. Il s'agit d'éléments géométriques et sémantiques de la carte dont l'état évolue au fil du temps. L'apprentissage des flux de circulation et de l'état des zones d'accident à partir des données de flotte permet un comportement de conduite plus efficace et prédictif. Cette couche acquiert et apprend également des informations qui permettent de prédire le comportement de conduite humaine et l'état dynamique des feux de circulation aux intersections. Il s'adapte également aux paramètres routiers temporaires tels que les ordres de stationnement, l'occupation et les horaires. Par exemple, le stationnement dans la rue dans certaines villes change certains jours de la semaine, la probabilité d'occupation est prédite et les règles de temps régissant un parking donné sont dérivées des lectures précédentes des capteurs de la couche cartographique des différents véhicules de la flotte traversant ce parking. . Apprendre et prédire le comportement au volant des conducteurs routiers peut s'avérer difficile en raison des différences socioculturelles entre les différentes sociétés. La modélisation empirique de ces comportements est essentielle pour un système AD général et évolutif.
F. Données cartographiques en temps réel
La couche en temps réel des cartes HD est une couche dynamique qui fournit des informations en temps réel sur l'environnement, telles que les conditions de circulation, les fermetures de routes et d'autres événements pouvant affecter les véhicules autonomes. la navigation. Cette couche est généralement créée en combinant des données provenant de diverses sources, telles que des caméras, des capteurs et d'autres appareils connectés montés sur des véhicules ou situés en bord de route. Grâce au crowdsourcing des véhicules participants ou à une infrastructure intelligente utilisant des réseaux de communication spécifiques, les données sont collectées en temps réel et utilisées pour mettre à jour des cartes de haute précision. La couche en temps réel peut inclure des informations telles que l'emplacement et la vitesse d'autres véhicules, l'emplacement et l'état des feux de circulation, ainsi que la présence de zones de construction ou d'autres obstacles et blocages sur la route. Ces informations sont essentielles pour que les véhicules autonomes puissent prendre des décisions de conduite sûres et efficaces en temps réel afin d'optimiser la fluidité du trafic et de réduire les embouteillages. De plus, la couche en temps réel peut être utilisée pour améliorer la précision et l'exhaustivité des cartes HD en fournissant des informations à jour sur l'environnement qui n'ont peut-être pas été capturées par les capteurs utilisés pour créer la carte. En termes simples, la couche en temps réel des cartes HD fournit une représentation dynamique et actualisée de l'environnement. La mise à jour en temps réel de cartes HD avec des éléments dynamiques est un défi et nécessite une infrastructure de communication intelligente complexe et une coopération entre plusieurs acteurs. La transmission de données entre les systèmes de transport intelligents (STI), les fournisseurs de cartes HD et les véhicules doit être fiable et répondre à certaines exigences décrites plus loin dans cette enquête.
Carte de haute précision dans l'architecture du système de conduite autonome
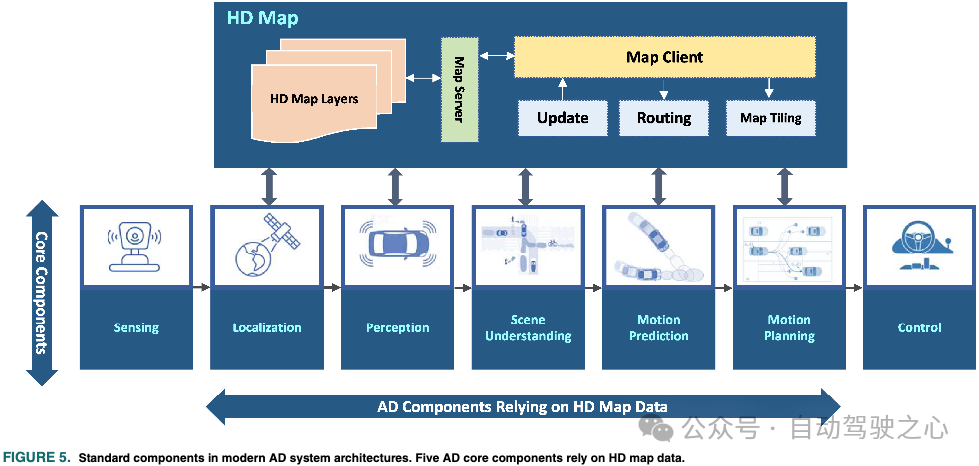
La carte de haute précision fournit au système AD une représentation détaillée et précise de l'environnement routier. Ces cartes contiennent des informations géométriques, topologiques et sémantiques au niveau des voies nécessaires à une navigation sûre et efficace des véhicules autonomes. L'utilisation de cartes HD dans les voitures autonomes leur permet de mieux comprendre leur environnement, de planifier des itinéraires et de prendre des décisions de conduite plus précises pour assurer la sécurité des passagers et des autres usagers de la route. Cette section traite de l'importance et de l'utilisation des cartes de haute précision dans les systèmes AD. Les données cartographiques d’ultra-précision font désormais partie intégrante de la plupart des différents composants essentiels des systèmes AD. Afin de discuter de l'importance et de l'utilisation des cartes HD dans AD, nous présentons brièvement l'architecture et les composants standard d'un système AD moderne typique. La figure 5 montre les composants standard d'un système AD, montrant les composants qui s'appuient sur des cartes HD. Cette section commence par une brève introduction à l'architecture du système AD, à son fonctionnement et à ses différents composants. Le reste de cette section fournit un examen approfondi de l'état de l'art des composants AD qui s'appuient sur des cartes HD.
A. Architecture du système de conduite autonome
Un véhicule automatisé est un système cyber-physique complexe dans lequel différents composants doivent travailler ensemble pour accomplir la tâche de conduite globale de manière robuste, fiable et sûre. Bien qu’il n’existe pas d’architecture unique pour les systèmes AD, nous nous appuyons dans ce travail sur une architecture commune qui nous aide à comprendre comment les cartes HD peuvent être utilisées pour améliorer différentes fonctions des systèmes AD. Semblable à tout système robotique, un véhicule autonome peut être considéré comme un agent cognitif composé de trois composants principaux : (1) capteurs, (2) perception et (3) comportement. La décomposition de ces éléments en un système AD de niveau industriel donne lieu à plusieurs composants, comme le montre la figure 5. Les composants de détection dans l'architecture du système AD moderne incluent généralement différents capteurs tels que l'IMU, le GPS, les caméras, le lidar et le radar. Un sous-ensemble de ces capteurs permet au véhicule de connaître sa position par rapport à l'environnement, c'est-à-dire pour la localisation, et les capteurs restants sont utilisés pour détecter l'environnement lui-même. Le rôle du composant de détection est de lire et de prétraiter les données brutes du capteur et de les fournir à d'autres parties du système AD. Dans sa forme la plus simple, un composant de détection consiste en un ensemble de pilotes de capteurs qui lisent les données brutes des capteurs en temps réel. Le composant de positionnement est l’un des composants les plus critiques pour le fonctionnement fiable de l’ensemble du système AD. Son objectif est d'estimer avec précision la position du véhicule. Les erreurs localisées sont propagées au reste du pipeline de traitement AD. La localisation est simplement un estimateur d'état qui fusionne les données brutes des capteurs provenant des composants de détection. De plus, la disponibilité de cartes permet une localisation améliorée et robuste, en particulier dans les zones où certains capteurs tombent en panne ou ont des performances dégradées. Le rôle de la perception est de générer une représentation de niveau intermédiaire de l'état actuel de l'environnement, comprenant des informations sur les obstacles et les facteurs routiers. Cette représentation comprend également des détails sur les voies (emplacement, limites, marquages et types), les panneaux de signalisation, les feux de circulation et les zones carrossables. Les techniques de vision par ordinateur et d’apprentissage profond sont largement utilisées pour les tâches de segmentation, de clustering et de classification. De plus, la fusion au niveau de la cible constitue également une partie importante de cette composante. Le résultat de la perception est une liste d’objets suivis et une segmentation sémantique de l’image pour la compréhension de la scène. Les informations géométriques et sémantiques des cartes HD peuvent également être utilisées pour améliorer la détection et la fusion d'objets. Une perception précise est essentielle à la sécurité, car les erreurs de perception peuvent affecter la qualité des informations utilisées par l'ensemble du système AD. Par conséquent, l’utilisation de sources de données de capteurs redondantes augmente la confiance dans l’exactitude de la perception, améliorant ainsi la robustesse du système global. Le composant de compréhension de la scène est le pont entre le composant perceptuel du système AD et la représentation abstraite de l'état de niveau intermédiaire de l'environnement donnée par le composant cognitif de haut niveau. Ce composant vise à fournir un niveau plus élevé de compréhension contextuelle des scénarios de conduite en créant des cartes et des données de haute précision fournies par le composant de perception. Plus loin dans cette section, nous discutons de la manière dont ces deux sources d'informations peuvent être fusionnées pour créer une représentation de scène permettant de comprendre l'environnement de conduite. Un autre composant du pipeline AD qui s'appuie sur des cartes HD est le composant de prédiction de mouvement. Il s'appuie sur des représentations spatio-temporelles de haut niveau de l'environnement fournies par la compréhension de la scène pour prédire le comportement des agents routiers autour du véhicule. Le rôle des cartes HD dans la prédiction de mouvement est de fournir les trajectoires précédentes de chaque agent routier dans la scène. La prédiction de mouvement est un problème hautement multimodal dans lequel les cartes HD jouent un rôle clé, qui est discuté en détail dans cette section. Le composant de planification de mouvement est conçu pour calculer des trajectoires réalisables, sans collision et sûres pour les véhicules autonomes. Ceci est réalisé en optimisant le chemin le plus court global obtenu par l'algorithme de routage exécuté sur les données cartographiques HD et la trajectoire prédite de l'agent routier. La planification de mouvement inclut également des capacités de planification de comportement qui s'appuient sur l'état de la scène actuelle définie par les objets détectés et les cartes HD. L'unité de contrôle reçoit la trajectoire prévue et calcule les commandes de commande pour les systèmes d'entraînement de direction, de freinage et d'accélération. Le composant de contrôle ne s'appuie pas explicitement sur des données cartographiques, il ne sera donc pas pris en compte dans cette enquête. Enfin, comme le montre la figure 5, un composant spécial est utilisé pour servir tous les autres composants en traitant les demandes de fourniture de données cartographiques. Les données cartographiques HD sont généralement stockées dans une base de données interrogée par un serveur de cartes (local ou cloud) pour acheminer, mosaïquer et mettre à jour les demandes des clients cartographiques dans le véhicule. Étant donné que l’élément de routage nécessite un traitement algorithmique spécial, nous le considérerons dans l’étude des applications de cartes HD dans les systèmes AD.
B. Positionnement
Le composant de positionnement du système AD est conçu pour estimer la position et l'orientation du véhicule par rapport au système de coordonnées de référence global. Son rôle clé est de maintenir systématiquement une précision et une robustesse élevées dans les estimations requises des composants successifs du système. La précision de l'algorithme de positionnement détermine la fiabilité de l'ensemble du système AD. La robustesse du positionnement dans des conditions météorologiques défavorables est une exigence clé pour les systèmes AD modernes, car une performance d'estimation dégradée peut entraîner de graves conséquences et des dommages potentiels. Au cours des deux dernières décennies, d’importantes recherches sur le positionnement ont abouti à des résultats remarquables, donnant lieu à diverses méthodes. Pour garantir des conditions de fonctionnement normales et garantir la sécurité globale du système, les véhicules autonomes doivent être positionnés avec une précision de l’ordre de 10 centimètres.
C. Perception
Le composant de perception dans les systèmes AD est souvent associé au traitement des images brutes de caméra et des nuages de points lidar, non seulement pour détecter et suivre des objets statiques (par exemple, des panneaux de signalisation et des marquages routiers) ; comme les véhicules, les piétons et les cyclistes environnants. La perception est l’une des fonctions essentielles des systèmes AD. Garantir sa fiabilité et ses performances en temps réel est essentiel pour garantir une navigation sans collision. La fusion des données de perception avec les informations géométriques et sémantiques détaillées et précises contenues dans les couches de cartes HD peut potentiellement améliorer la perception en se concentrant sur les régions d'intérêt (ROI) les plus pertinentes. Plus précisément, la géométrie de la carte HD permet de définir des ROI pour filtrer le nuage de points, ne laissant que celles présentant un intérêt particulier pour la fonction de perception, simplifiant et augmentant ainsi l'efficacité informatique d'une détection sans hâte.
D. Compréhension des scénarios
Comprendre l'environnement de conduite est crucial pour que les véhicules autonomes prennent des décisions correctes et sûres. L’une des premières motivations des cartes HD était de fournir aux véhicules autonomes des informations précises et détaillées pour les aider à comprendre leur environnement. Ces informations permettent au système AD de comprendre la situation de conduite actuelle et d'interpréter toutes les entités qui composent la scène. La géométrie et la sémantique contenues dans la carte permettent de construire systématiquement des modèles de données compacts et des représentations de l'environnement, permettant aux véhicules de gérer des scénarios de conduite complexes. Plus précisément, le composant de compréhension de scène dans les systèmes AD, soutenu par les informations géométriques et sémantiques des cartes HD, peut systématiquement fournir un contexte perceptuel significatif. Outre la détection d'objets bruts, la compréhension de scène vise à extraire et à estimer des informations critiques pour la sécurité et à les rendre disponibles pour les étapes de traitement ultérieures.
E.ROUTING
Les cartes numériques au niveau de la route facilitent la navigation du conducteur humain. Les calculs d'itinéraire dans ces cartes ne peuvent pas aller au-delà de l'utilisation de connexions au niveau de la route, car ces cartes n'incluent pas de détails au niveau des voies. Des itinéraires de conduite précis et optimisés sont nécessaires pour économiser du temps et de l’énergie et promouvoir la sécurité des véhicules dans le monde entier. Les calculs d’itinéraires efficaces et peu coûteux doivent prendre en compte des modèles de l’environnement au niveau des voies. De plus, dans des environnements très dynamiques, des informations détaillées sur l’état du trafic et l’occupation des voies sont essentielles pour ajuster dynamiquement les itinéraires à mesure que les véhicules autonomes naviguent dans l’environnement. En prenant en compte les informations détaillées et précises au niveau des voies ainsi que les couches a priori et en temps réel de la couche statique de la carte HD, un calcul d'itinéraire dynamique efficace est possible. Pour que le sous-système d'itinéraire d'un véhicule autonome calcule un chemin parcouru depuis l'emplacement actuel jusqu'à une destination définie, le système doit recevoir la dernière carte du serveur de cartes HD, comme le montre la figure 5. Alternativement, comme les cartes numériques, les calculs d’itinéraires peuvent être fournis en tant que service. Une fois sa position précise envoyée au serveur de cartes HD, l'itinéraire optimal peut être calculé et renvoyé au véhicule pour prendre en charge d'autres composants essentiels du système. Ces dernières années, ces services de routage ont consisté à prendre en compte les conditions de circulation en temps réel et les facteurs énergétiques (par exemple, l'itinéraire le plus économe en énergie). Pour les véhicules autonomes, d’autres facteurs peuvent être pris en compte, tels que des itinéraires qui évitent les environnements urbains complexes difficiles à parcourir avec l’ADS, ou des itinéraires avec une bonne couverture réseau pour garantir une connectivité continue aux services en ligne, y compris les services de cartographie de haute précision en temps réel.
F. Planification de mouvement
Le rôle de la planification de mouvement dans le système AD est de générer des trajectoires réalisables, sûres, sans collision et économes en énergie. Les tâches de planification de mouvement incluent généralement la génération de trajectoires et la planification du comportement. La planification comportementale est une fonction décisionnelle avancée utilisée pour décider des transitions entre différents états de conduite, tels que les changements de voie, le suivi des véhicules dans la voie, le ralentissement et le stationnement, etc. Pour effectuer ces transformations en toute sécurité, le planificateur comportemental a besoin de cartes locales et d'une connaissance des véhicules pour construire un modèle de transformation de l'environnement du véhicule. Contrairement à la navigation des robots mobiles, l’environnement routier est très structuré et tous les usagers de la route doivent respecter le code de la route. Les trajectoires AD générées sont strictement nécessaires pour garantir le respect des règles de circulation et la circulation dans les zones routières carrossables. Différentes méthodes existent pour planifier les déplacements des véhicules autonomes, et elles s'appuient toutes dans une certaine mesure sur les informations géométriques et sémantiques fournies par des cartes de haute précision pour respecter les règles de circulation. Dans les méthodes de planification de mouvement basées sur des échantillons, la géométrie des voies de la carte HD est utilisée pour restreindre l'espace de recherche en rejetant les trajectoires candidates irréalisables.
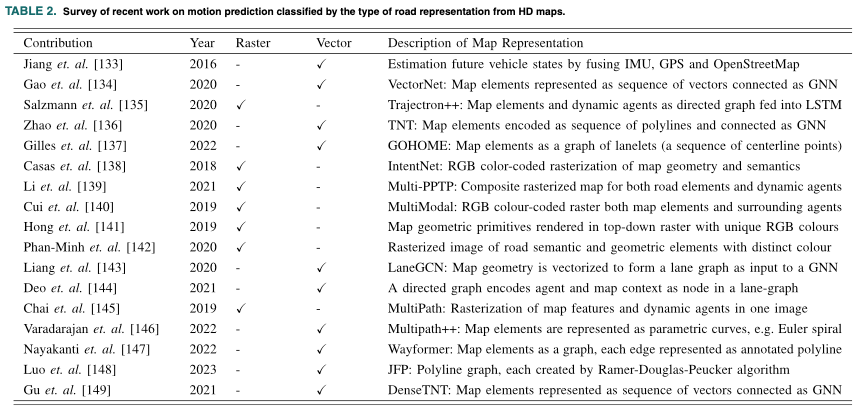
G. Motion Prediction
L'environnement de conduite est très dynamique et implique différents acteurs de la route tels que les piétons, les véhicules et les cyclistes. Prédire les mouvements et comportements futurs de ces acteurs de la route est essentiel pour que les véhicules autonomes puissent construire des représentations contextuelles de leurs environnements interactifs, prédisant ainsi des situations potentiellement dangereuses. D’un point de vue abstrait, ces acteurs du trafic peuvent être considérés comme un système multi-agent complexe. En fait, le développement de solutions fiables pour prédire le mouvement et le comportement des agents routiers améliorera la sécurité et la capacité des véhicules autonomes à s'adapter à un comportement humain dans des conditions de circulation réelles. La prévision du comportement de ces usagers de la route est cruciale pour les systèmes AD et est principalement utilisée pour l'évaluation des risques et la planification de mouvements sûres et confortables. La prédiction de mouvement consiste à estimer le comportement futur des agents routiers en fonction de leur état actuel et d'un modèle de leur environnement. Divers efforts de recherche ont abordé le problème de la prévision des mouvements futurs des usagers de la route.
H. Applications tierces
Les cartes HD peuvent fournir des données GT précises et fiables, qui peuvent être utilisées comme référence pour calibrer la sortie du capteur. Par exemple, le lidar peut être calibré à l’aide de coordonnées de haute précision d’éléments géométriques d’une carte haute définition et parfaitement aligné avec une IMU. En comparant les mesures des capteurs aux données cartographiques HD, toute erreur ou divergence peut être identifiée et corrigée, améliorant ainsi l'étalonnage du capteur. De plus, les cartes HD peuvent être utilisées pour un (auto)étalonnage en ligne. La disponibilité de cartes HD, de données brutes de capteurs en temps réel et d'algorithmes pour effectuer des comparaisons permet de calculer l'erreur entre les mesures des capteurs et GT. Il permet donc une correction continue des erreurs d’étalonnage des capteurs en temps réel. Cela rend le système AD plus robuste et plus fiable face aux conditions environnementales changeantes ainsi qu’aux changements de performances des capteurs. L'étalonnage en ligne permet un étalonnage du capteur plus précis et plus robuste par rapport aux méthodes d'étalonnage hors ligne. Plus récemment, des cartes HD ont également été utilisées pour améliorer les annotations routières afin de créer de grands ensembles de données pour la détection des points de repère de la circulation.
Création de cartes de haute précision
A. Système de cartographie mobile
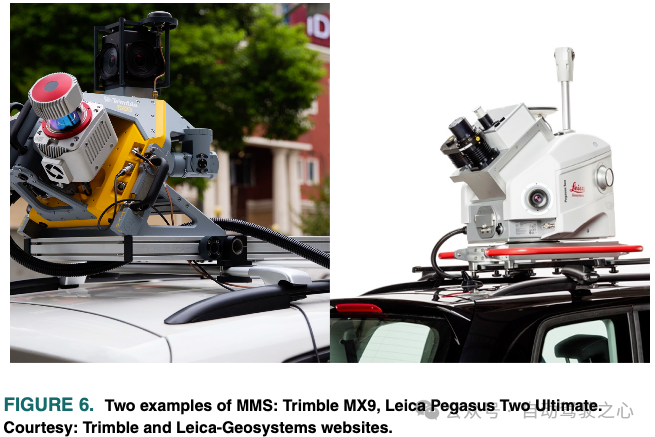
La création de cartes de haute précision est un processus complexe qui nécessite plusieurs étapes. La première étape de la création d'un programme de cartographie HD consiste à envoyer des véhicules spécialisés équipés d'une suite de capteurs très précis et bien calibrés pour étudier et collecter des données sur l'environnement. Les véhicules de collecte de données utilisés pour la cartographie peuvent être équipés d'une connexion à un service de correction avec une précision de positionnement RTK (cinématique en temps réel) jusqu'à quelques centimètres ou un GNSS de haute précision permettant des services de correction. Les mesures de positionnement GNSS sont souvent intégrées aux mesures provenant d'IMU (unités de mesure inertielle) et d'odomètres de roue hautes performances. Il existe plusieurs produits commerciaux intégrant le GNSS et l'IMU en tant que système de navigation inertielle dans une seule unité. Les véhicules de cartographie sont également équipés d'un ou plusieurs lidar et caméras haute résolution pour collecter des données brutes 3D/2D de l'environnement routier. Il existe deux manières de mettre en place un outil de collecte de données pour la cartographie. La première étape consiste à acheter les capteurs ci-dessus, à sélectionner la configuration appropriée et à les installer sur le véhicule. Bien que cette approche offre la flexibilité de configurations de capteurs prédéfinies, l'étalonnage de plusieurs capteurs différents avec la précision requise pour le traçage n'est pas trivial et prend du temps, en particulier pour les caméras. Alternativement, certains fabricants proposent un ensemble complet de capteurs dans un seul package, appelé système de cartographie mobile (MMS). Un exemple de MMS commercial est présenté à la figure 6.
Maintenance des cartes HD
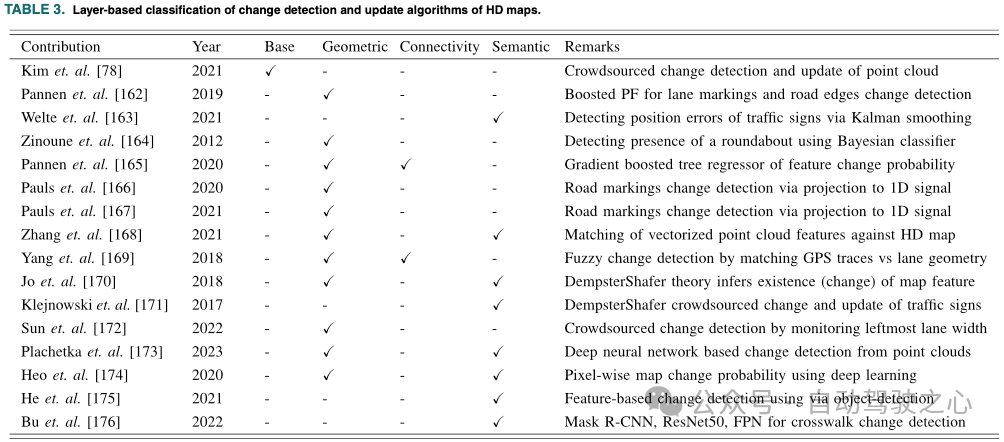
Disposer des dernières cartes HD est crucial pour le bon fonctionnement des divers composants principaux d'AD. Les bugs dans les cartes HD peuvent causer de graves dommages en raison de mauvaises décisions prises par le système. Les mauvaises décisions peuvent être évitées grâce à des mises à jour fréquentes des véhicules cartographiques. L'environnement routier est très dynamique et peut changer fréquemment en raison de la construction de nouvelles infrastructures, de l'entretien des routes et de l'agrandissement des voies. Le véhicule cartographique doit être capable de détecter les changements dans l'environnement et de les envoyer pour mettre à jour la carte. Le processus de mise à jour de la carte implique des étapes de traitement complexes, notamment le traitement des données provenant de plusieurs sources et capteurs à différentes échelles, l'identification des écarts entre la carte stockée et les données environnementales nouvellement collectées, et finalement l'intégration de ces écarts pour mettre à jour les différentes couches de la carte. Plusieurs méthodes et approches ont été développées dans la littérature pour capturer les changements dans les cartes HD et les mettre à jour. Dans ce qui suit, nous passons en revue différentes méthodes et méthodes de détection des changements dans les cartes HD et comment ces informations peuvent être appliquées pour mettre à jour les cartes. L'approche que nous avons suivie pour étudier les efforts antérieurs visant à maintenir des cartes HD est basée sur l'analyse des couches maintenues par chaque méthode de pointe, comme le montre le tableau 3.
A. Détection des changements de carte
La détection des changements dans les cartes HD fait référence au processus d'identification des changements dans l'environnement, tels que les nouvelles constructions, les fermetures de routes, etc. Les couches de la carte sont ensuite mises à jour en conséquence. Les cartes HD changent régulièrement, et disposer d'une carte fiable pour les voitures autonomes est essentiel pour une navigation sûre. La détection des changements est généralement réalisée grâce à l'utilisation de divers capteurs, tels que des caméras, un lidar et un radar, combinés à des algorithmes de vision par ordinateur et à des techniques d'apprentissage automatique. Même avant l’avènement des cartes haute définition, les algorithmes de détection des changements ont trouvé leur place dans de nombreuses applications. La télédétection est l’une des premières applications de la détection et de la mise à jour des changements cartographiques. Il a également été utilisé avec succès dans la surveillance urbaine, les changements forestiers, la surveillance des crises, la mise à jour des informations géographiques tridimensionnelles, la surveillance des progrès de la construction et les enquêtes sur les ressources. Au niveau le plus élémentaire de ces applications, le problème revient à comparer les données brutes des capteurs, principalement des nuages de points 3D, des images 2D, ou une combinaison des deux.
B. Mise à jour des données cartographiques
La deuxième phase de la maintenance de la carte HD consiste à mettre à jour les éléments de la carte en fonction des résultats de la détection des changements. En termes simples, la mise à jour des cartes équivaut à un problème de fusion de données probabilistes. Surveiller en permanence les changements dans un environnement en constante évolution en temps quasi réel et fusionner différents modèles de données dans le temps et dans l'espace, ainsi que mettre à jour plusieurs couches à partir de différentes sources, est en effet une tâche difficile. Cadena et al. notent dans leur document d'enquête que le processus distribué de mise à jour et de maintenance des cartes haute définition créées et utilisées par de grandes flottes de véhicules autonomes est un sujet intéressant pour les recherches futures. Dans cette direction, Kim et al. ont proposé une solution pour maintenir à jour les nouvelles couches d’entités à partir de données de nuages de points issues du crowdsourcing. Cette nouvelle carte de fonctionnalités constitue la base de la construction de différentes fonctionnalités sémantiques et géométriques pour les cartes HD.
Infrastructure de données et de communication pour les cartes HD
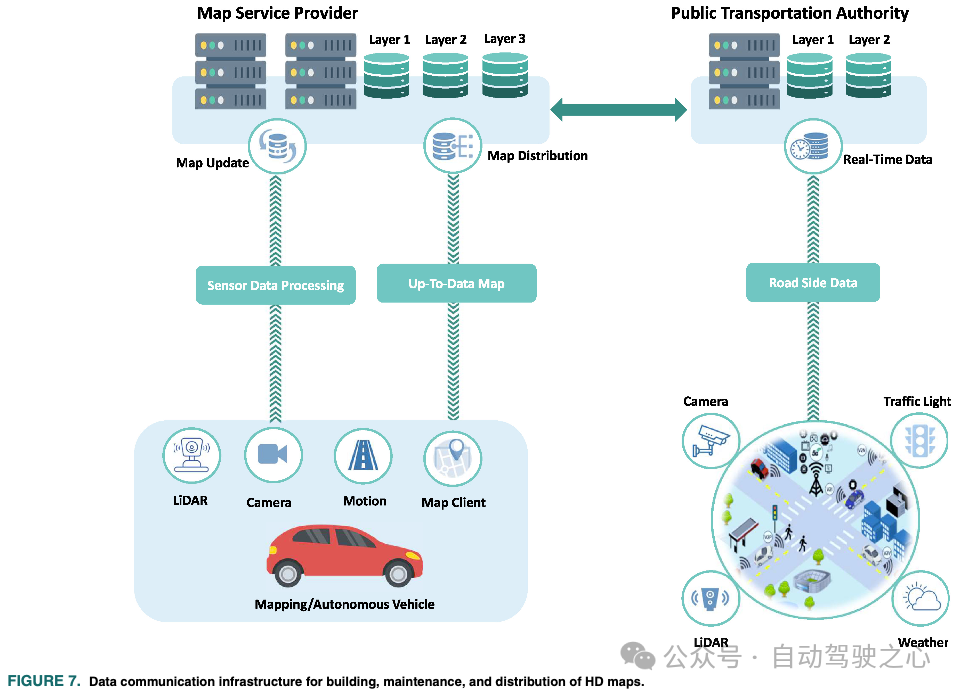
La création et la maintenance de cartes HD à grande échelle constituent un problème d'échange de données entre plusieurs parties prenantes, par exemple les gouvernements en tant que propriétaires des infrastructures routières STI, les fournisseurs de cartes et les véhicules, comme le montre la figure 7. La collecte, la construction, la maintenance et la distribution de données cartographiques nécessitent des communications fiables et une infrastructure informatique distribuée. Cette section traite de l'infrastructure de données et de communication requise pour étendre la création, la maintenance et la distribution de cartes HD.
Défis et perspectives d'avenir
Bien que la CCAM ait réalisé des progrès significatifs au cours de la dernière décennie, atteindre la pleine autonomie des véhicules reste un défi non résolu. Pour que les véhicules autonomes soient déployés à grande échelle, une solution évolutive de cartographie HD est essentielle. Dans cette section, nous mettons en lumière les différents défis qui doivent être relevés pour réaliser tout le potentiel de la carte HD CCAM. Il ne fait aucun doute que la disponibilité de solutions rentables et flexibles pour créer, maintenir et distribuer des données cartographiques entre les parties prenantes améliorera considérablement l’évolutivité du CCAM dans les générations futures de villes intelligentes. De plus, nous discutons des perspectives futures et des applications des cartes HD.
A. Défis
- Standardisation et représentation des données : Le concept de cartes haute définition a été largement accepté et est devenu une technologie clé pour le CCAM. Cependant, il n'existe pas de consensus sur la manière de représenter les données cartographiques, sur le nombre de couches requises, sur les données cartographiques qui doivent être stockées dans chaque couche et sur le format de données dans lequel les données cartographiques doivent être stockées. En raison de la complexité des cartes HD et des grandes quantités de données et d'informations qu'elles contiennent, il est difficile de définir une norme universelle pour celles-ci, ce qui rend difficile la création d'une norme complète et facile à comprendre, à stocker, à maintenir, à mettre à jour, et distribuer efficacement. La définition d'une norme commune pour les données cartographiques assurera une plus grande compatibilité des données et facilitera l'accès aux données tout en réduisant les coûts de développement et d'intégration. En outre, cela améliorera la qualité, la cohérence et la confidentialité des données, améliorant ainsi la sécurité routière pour tous les acteurs, y compris les véhicules automatisés.
- Évolutivité : les solutions de cartographie HD évolutives sont essentielles au déploiement à grande échelle de véhicules autonomes. Construire des cartes haute définition des villes, des régions et de tout le pays et les maintenir à jour reste un défi de taille, en particulier lorsqu'il s'agit de différentes normes, règles de circulation et réglementations utilisées pour représenter les caractéristiques géométriques des routes et les panneaux de signalisation. Ces normes varient selon les régions. Les algorithmes de cartographie doivent être génériques et capables de fonctionner dans différentes régions et pays. La cartographie doit être un processus continu de collecte et de traitement de données pour corriger les zones modifiées. Ce processus devient difficile sur de vastes zones géographiques où un grand nombre de véhicules doivent faire partie du processus de cartographie. Le coût de la cartographie dépend directement de la taille de la zone à cartographier et du nombre de véhicules nécessaires pour la desservir. Comme indiqué plus haut dans cet article, les véhicules de cartographie sont très coûteux. De plus, l’utilisation de véhicules individuels équipés de capteurs grand public nécessite des algorithmes complexes qui ne sont pas encore matures.
- Infrastructure réseau et informatique : la gestion et le traitement de grandes quantités de données dans le contexte de la création et de la mise à jour de cartes HD évolutives nécessitent une infrastructure réseau et informatique fiable, coordonnée et quasiment en temps réel. Avec l’émergence des communications cellulaires 5G/6G, de l’Internet des objets (IoT) et des architectures informatiques de pointe, de nombreuses opportunités de communications embarquées sont généralement disponibles, faisant des solutions permettant de créer des cartes haute définition une option commercialement viable. Ces infrastructures de communication et informatiques sont conçues pour gérer de telles applications gourmandes en données et répondre à leurs exigences en matière de latence et de bande passante. Les cartes participatives à grande échelle avec un grand nombre de véhicules connectés seront l’une des principales applications de ces infrastructures.
- Limitations des algorithmes de cartographie : malgré les énormes efforts de R&D visant à automatiser le processus de création de cartes HD, les derniers résultats de recherche sur les cartes HD montrent clairement que les algorithmes de cartographie utilisés pour extraire les caractéristiques des cartes HD et construire une topologie des routes et des voies restent limités à des algorithmes simples. caractéristiques. Les algorithmes de pointe actuels peuvent détecter des éléments géométriques simples, mais ne peuvent pas gérer des éléments à forte courbure tels que les ronds-points. De plus, la plupart de ces méthodes nécessitent plusieurs étapes de post-traitement pour obtenir des caractéristiques dans un format vectoriel approprié. Les fonctionnalités sémantiques des cartes sont encore limitées à un très petit nombre de panneaux de signalisation facilement détectables. Peu de travaux récents ont commencé à aborder le problème de la construction de topologies de voies pour construire des réseaux de connexion route/voie simplifiés. Le développement d'un pipeline de cartes génériques permet la construction d'une carte HD entièrement fonctionnelle contenant des informations géométriques, sémantiques et topologiques. Construire un tel pipeline reste un défi.
- Propriété, confidentialité, intégrité et distribution des données cartographiques : l'avenir de la création et de la maintenance de cartes HD consistera à automatiser et à distribuer les processus impliqués à des millions de voitures. La collecte, le traitement et le stockage de grandes quantités de données distribuées à partir de l'environnement soulèvent plusieurs préoccupations concernant la propriété, la confidentialité, l'intégrité et la distribution des données. Les données cartographiques brutes sont générées dans le véhicule, agrégées avec d'autres sources de données provenant des autorités publiques, traitées et distribuées par les fournisseurs de cartes. La propriété des données cartographiques, de la collecte à la distribution, devra peut-être être abordée dans les cartes HD à grande échelle. De plus, la protection de la vie privée des individus et des véhicules est essentielle et doit être prise en compte lors du processus de dessin. Les données cartographiques peuvent inclure des informations sensibles sur l'utilisateur telles que l'emplacement précis du véhicule et une description précise de l'environnement du véhicule. L’intégrité des données cartographiques HD doit être garantie pour éviter des décisions erronées et fatales, notamment lorsqu’elles sont utilisées dans des véhicules autonomes. La construction de cartes haute définition précises et fiables reste un problème de recherche permanent. Les cartes HD commerciales sont généralement examinées et vérifiées manuellement. La génération de données cartographiques haute définition précises et fiables à partir de plusieurs sources de données, par exemple via le crowdsourcing, pose un certain nombre de problèmes techniques qui doivent être résolus. La propriété, la confidentialité et l’intégrité des cartes haute définition évolutives ont récemment commencé à attirer l’attention des chercheurs. La blockchain, en revanche, s'est avérée être une solution prometteuse pour garantir l'intégrité des données en raison de sa nature distribuée et sécurisée. Le cas d’utilisation consistant à créer et à mettre à jour des cartes HD évolutives tout en préservant la traçabilité, la confidentialité et l’intégrité des données est une application parfaite pour la blockchain. Cette technologie devrait jouer un rôle central dans la création et la distribution de la prochaine génération de cartes haute définition.
B. Orientations futures
- Précision : le positionnement précis a été l'une des principales motivations pour introduire des cartes haute définition dans les véhicules autonomes.L'existence d'une représentation dense et compacte de l'environnement routier est fondamentale pour les cartes HD, notamment en matière de localisation ; Il y a toujours eu un compromis entre la densité des informations contenues dans les cartes HD et l'effort de calcul requis pour traiter ces informations. Les progrès récents dans la représentation neuronale de scènes 3D permettent de reconstruire des scènes 3D photoréalistes dans des représentations très compactes. Représenter la couche de base de la carte à l'aide de Neural Radiation Fields (NeFR) permet de bénéficier d'une représentation compacte et photoréaliste de cette couche. Cette technologie pourrait ouvrir la voie à une nouvelle ère de voitures autonomes.
- Applications au-delà de la conduite autonome : les cartes HD ont été développées principalement pour aider les véhicules autonomes à comprendre leur environnement et à y naviguer en toute sécurité. Puisque les cartes HD fournissent une représentation détaillée et précise de l’environnement, elles peuvent également être utilisées pour améliorer la qualité de divers services rendus par les cartes numériques classiques. De plus, les cartes HD jouent un rôle important dans la technologie d’assistance numérique pour les personnes handicapées. Si les personnes malvoyantes sont équipées de capteurs appropriés et ont accès à des représentations très précises, détaillées et sémantiquement riches de leur environnement, leur mobilité et leur sécurité peuvent être considérablement améliorées. S’ils sont positionnés avec précision, les appareils d’assistance numérique seront capables d’interpréter et de comprendre l’environnement pour générer des messages de navigation vocaux pour une navigation sûre. L'état en temps réel des feux de circulation et d'autres informations routières sur les cartes HD pour piétons est pertinent pour améliorer la fonctionnalité de ces appareils. Actuellement, la plupart des fournisseurs de cartes HD ne proposent que des cartes représentant l’environnement du véhicule. Les itinéraires impliquant des participants autres que les véhicules, tels que les chemins piétonniers et les pistes cyclables, ne sont toujours pas cartographiés sur les cartes HD actuelles. La création et la mise à jour de cartes haute définition pour tous les participants ouvriront la voie à un large éventail de navigations autonomes et non autonomes, ainsi qu'à un certain nombre de services numériques utiles.
- Pour les jumeaux numériques : Un jumeau numérique environnemental est une représentation numérique holistique d'un environnement, incluant toutes ses caractéristiques physiques et fonctionnelles. Les jumeaux numériques à l'échelle de la ville sont un concept émergent au sein du CCAM qui vise à construire un modèle basé sur les données qui proviendra de diverses sources de capteurs IoT, de véhicules connectés, de bâtiments, d'infrastructures et de réseaux de transport intelligents, ainsi que de toutes les autres sources de données. Les données sont combinées pour aider à créer un modèle de ville complet et en temps réel pour améliorer les services routiers. Ce concept généralise les cartes HD en tant que modèles numériques pour véhicules connectés et autonomes en un modèle numérique holistique qui aide toutes les entités de la société. Les jumeaux numériques peuvent même être utilisés pour modéliser le comportement de différentes entités dans un environnement, même à un niveau de détail microscopique. La carte HD sera un module unique du jumeau numérique, prenant en charge différentes fonctionnalités et services pour les véhicules connectés et autonomes dans nos villes intelligentes. Comme les cartes haute définition peuvent être utilisées pour simuler des scénarios de conduite complexes, des jumeaux numériques seront utilisés pour simuler et analyser des scénarios complexes à l’échelle de la ville pour ces véhicules. Les jumeaux numériques permettront d’étudier, d’analyser et de simuler l’impact de nouveaux développements ou de changements dans les schémas de circulation et pourront aider les urbanistes et les décideurs à analyser et à optimiser les performances des villes en prévoyant des scénarios futurs et en identifiant les opportunités d’amélioration. Construire un jumeau numérique à l’échelle d’une ville constitue en effet un défi de taille, nécessitant de grandes quantités de données, et pouvant s’avérer un processus complexe et long. La validation croisée, l’intégrité et la fiabilité de grandes quantités de données distribuées restent des défis dans la création de jumeaux numériques. La cartographie routière participative à partir des véhicules sera remplacée par un processus unifié de cartographie extérieure et intérieure utilisant simultanément des quantités massives de données provenant de capteurs connectés de manière hétérogène.
Conclusion
La cartographie HD continue d'être un aspect en croissance rapide des applications CCAM du monde réel, stimulant l'innovation et les progrès dans le domaine. Bien qu'un grand nombre de travaux de recherche et de développement aient été réalisés sur l'application des cartes HD dans les systèmes AD et sur les algorithmes et l'infrastructure pour la création et la maintenance des cartes HD, il existe très peu de littérature pouvant résumer et fournir un point d'appui à ces efforts. . Cet article fournit un examen approfondi des travaux antérieurs sur la création et la maintenance de cartes HD, y compris des solutions rentables, ainsi que des exigences en matière de communication et de données cartographiques, de la génération à la distribution. De plus, cet article aborde les défis actuels liés à la création et à la maintenance de cartes HD. Plus précisément, nous fournissons un aperçu indépendant de la carte HD comme contexte pour la communauté plus large des systèmes de transport intelligents. Nous discutons et analysons également les dernières technologies d'utilisation des cartes HD pour diverses fonctions essentielles des systèmes AD. De plus, nous discutons et examinons en détail différentes approches, méthodes et algorithmes pour créer des cartes HD à différents niveaux et les maintenir à jour. Enfin, nous mettons en lumière le développement futur des cartes HD pour les applications mobiles de nouvelle génération.
Ce qui précède est le contenu détaillé de. pour plus d'informations, suivez d'autres articles connexes sur le site Web de PHP en chinois!
Articles Liés
Voir plus- Comment implémenter une grille de carte à l'aide de Baidu Maps
- Pourquoi Petal Map n'est-il pas disponible en Chine ?
- Solution de données de conduite intelligente 2.0 : l'efficacité du traitement des données de l'IA est considérablement améliorée et la technologie de publication des données de mesure dans le cloud est mise à niveau.
- Système de conduite intelligent NIO : une nouvelle étape avec un kilométrage dépassant les 500 millions de kilomètres
- NIO prend la tête du lancement de SkyOS, un système d'exploitation mondial, ouvrant un nouveau chapitre dans la conduite intelligente