
Maison >Périphériques technologiques >IA >Recherche générale sur le stationnement autonome, intégrant les normes de l'industrie, les évaluations des tendances et l'introduction de systèmes
Recherche générale sur le stationnement autonome, intégrant les normes de l'industrie, les évaluations des tendances et l'introduction de systèmes

- PHPzavant
- 2024-01-18 11:21:06946parcourir
Écrit devant
Le système de stationnement automatique signifie que le véhicule peut trouver indépendamment une place de stationnement et effectuer un stationnement précis sans intervention manuelle. Il peut également se déplacer vers un emplacement désigné en fonction des besoins de l'utilisateur. La maturité de cette technologie réduira considérablement les désagréments des personnes lors du processus de stationnement, comme la perte de temps à chercher une place de stationnement pendant une longue période, ainsi que les problèmes de sécurité tels que les collisions de véhicules et les frottements qui peuvent survenir lors de la recherche d'une place de stationnement.
Actuellement, de nombreuses entreprises technologiques et laboratoires universitaires explorent le domaine du stationnement autonome. Des sociétés telles que Mercedes-Benz et Bosch ont mis en place une infrastructure de stationnement. NVIDIA développe des algorithmes de conduite automatique et des méthodes de détection des places de stationnement pour les parkings. BMW a également installé des modules de stationnement automatique sur les véhicules de série.
Compte tenu de la demande généralisée de technologie de stationnement automatique dans l'industrie, nous avons mené une enquête systématique sur l'état de développement des systèmes de stationnement automatique. Y compris les Tendances des normes de l'industrie des systèmes de stationnement automatique, Indicateurs d'évaluation des performances, Technologie conçue dans chaque sous-module des systèmes de stationnement automatique, etc.
Tendances standards actuelles dans l'industrie du stationnement automatique
Étant donné que le système de stationnement automatique actuel a reçu une large attention de la part de l'industrie et du monde universitaire, divers pays et entreprises développent constamment la technologie du stationnement automatique. Il est donc particulièrement important de formuler des normes pour la technologie du stationnement automatique. Les normes techniques qui ont été formulées comprennent les Informations géographiques, Positionnement extérieur, Positionnement dans l'espace intérieur, Normes de stationnement et Normes de communication des véhicules. Les normes spécifiques sont résumées dans le tableau ci-dessous.
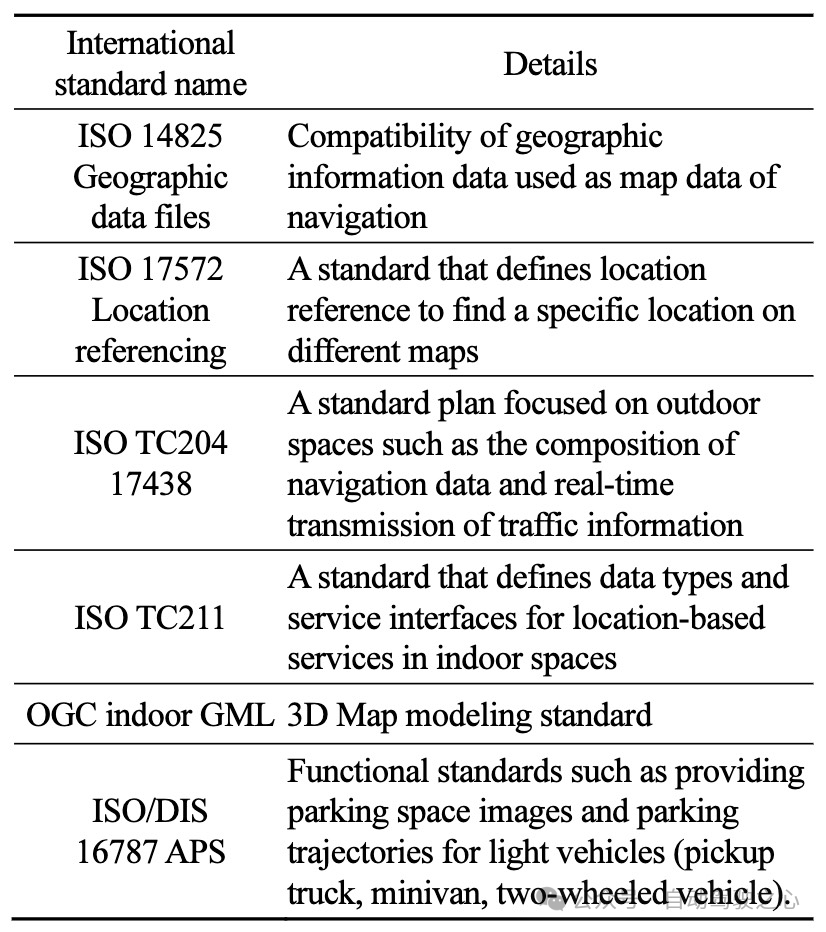
Normes pertinentes dans l'industrie du stationnement automatique
- Les normes d'information géographique et de positionnement établissent les principes et les bases de la dénomination, de la définition et du format des espaces extérieurs. Ces normes incluent ISO 14825, ISO 17572 et ISO TC204 177438, etc.
- La normalisation du positionnement spatial intérieur est également en cours d'élaboration, notamment les normes ISO TC211 et OGC.
- La norme de stationnement ISO/DIS 16787 APS propose le type d'informations nécessaires au stationnement et définit le nom technique de contrôle du véhicule. De plus, la norme définit les fonctions requises pour mettre en œuvre un système d'aide au stationnement et exécuter les fonctions de commande de direction du véhicule.
Normes d'évaluation des systèmes de stationnement automatique
L'évaluation actuelle des systèmes de stationnement automatique comprend deux parties, à savoir évaluation de la partie conduite automatique et évaluation de la partie stationnement automatique.
Normes d'évaluation pour la partie conduite autonome
L'évaluation de la technologie de conduite autonome suit la norme "Autonomous Driving Technology Stage" formulée par l'Automotive Engineering Society. Cette norme divise la technologie de conduite autonome en six niveaux, en fonction du niveau technique et. sujet de contrôle et capacités de conduite. Afin de faciliter l'évaluation de chaque niveau, les normes ISO/WD 34501 et ISO/WD 34502 en cours d'élaboration ont été proposées. La norme ISO/WD 34501 s'applique aux termes et définitions des scénarios de test dans les systèmes de niveau 3, tandis que la norme ISO/WD 34502 fournit des conseils sur les scénarios de test et un processus d'évaluation de la sécurité. La formulation de ces normes vise à fournir des critères d’évaluation unifiés pour le développement et l’application de technologies de conduite autonome et à promouvoir le développement de technologies de conduite autonome.
Normes d'évaluation pour la partie stationnement automatique
Bien que la technologie du stationnement automatique suscite actuellement beaucoup d'attention, le développement de normes internationales en est encore à ses balbutiements. Contrairement aux normes d’évaluation de la conduite autonome, le niveau technique du stationnement autonome est principalement mesuré par les normes d’évaluation des développeurs.
Le tableau suivant présente des exemples de scénarios de stationnement autonome dans le système de scénarios de situation de circulation. Les scénarios de stationnement sont divisés en fonction des niveaux de performance.
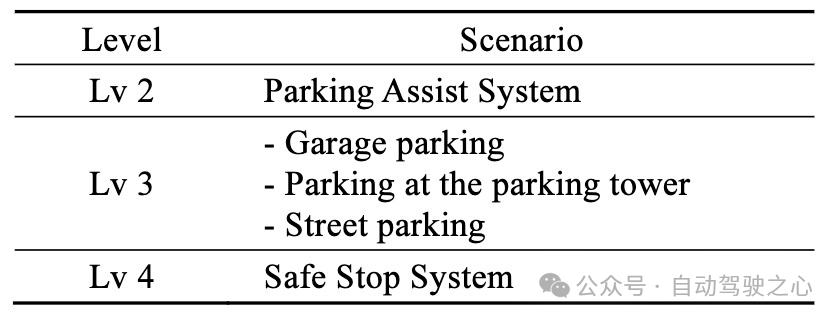
Division automatique des niveaux de stationnement
L'évaluation du système des scénarios de situation de circulation comprend deux parties de scénarios : conduite autonome et stationnement, et utilise le « stade technologique de conduite autonome » défini par la Society of Automotive Engineering pour indiquer la capacité de stationnement autonome. Il existe actuellement trois niveaux dans le système.
- Niveau 2 (Lv2) : il s'appelle le système d'aide au stationnement et est utilisé pour aider les gens à se garer plus facilement. Au niveau Lv2, les véhicules sont généralement équipés d'un système d'avertissement de distance d'obstacle et d'une caméra de recul.
- Niveau 3 (Lv3) : Le niveau 3 peut réaliser un stationnement automatique dans des scénarios désignés. Par exemple, des scénarios de stationnement simples comme se garer dans un garage.
- Niveau 4 (Lv4) : Tous les scénarios du Lv3 peuvent être réalisés au Lv4. De plus, lorsque le véhicule rencontre un obstacle, le véhicule peut revenir à sa destination après s'être arrêté ou évité l'obstacle.
Explication détaillée du système de stationnement automatique
Le système de stationnement automatique actuel comprend principalement trois parties, comme le montre la figure ci-dessous, qui sont processus de conduite de recherche, processus de stationnement automatique et processus de retour à la conduite . Nous donnons d’abord une introduction générale à chaque processus, puis présentons les tendances actuelles de développement de chaque processus.
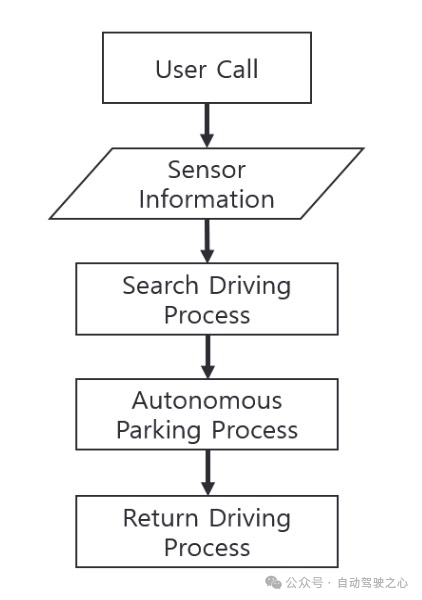
Workflow du système de stationnement automatique
Processus de conduite de recherche
Le but ultime du processus de conduite de recherche est que la voiture puisse trouver de manière autonome une place de stationnement dans le parking, ce processus nécessite donc l'utilisation de Positionnement, Évitement de collision et Technologie de détection d'espace de stationnement.
Introduction à la technologie de positionnement
Dans le système de stationnement automatique, le GPS ou le capteur IMU du véhicule peut être utilisé pour confirmer la vitesse et l'attitude du véhicule et corriger l'erreur d'estimation de la position du véhicule. Cependant, dans certaines scènes intérieures, le signal GPS ne peut pas être reçu. Par conséquent, les véhicules autonomes doivent être équipés de caméras, d’un lidar et d’un radar à ondes millimétriques pour les aider. L'image ci-dessous est une introduction à certaines informations des capteurs équipés du véhicule.
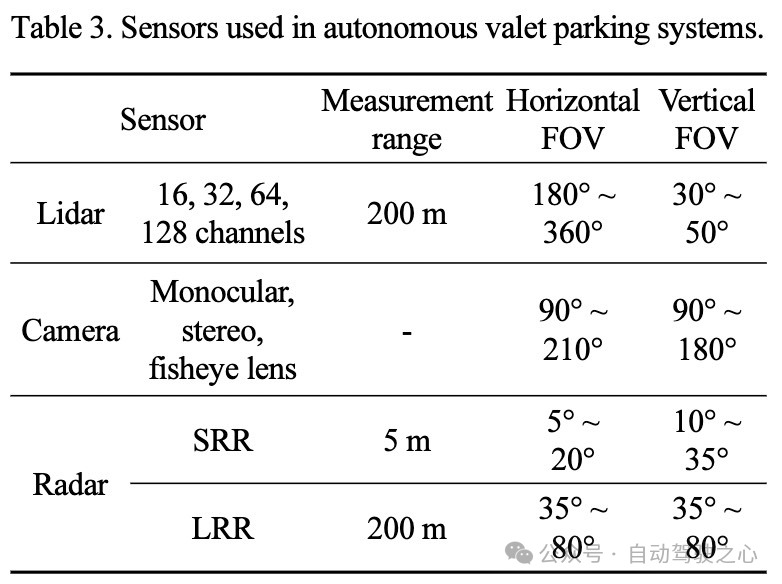
Introduction aux informations des capteurs équipés de véhicules à stationnement automatique
- Les capteurs Lidar utilisent des lasers pour détecter des objets. Les lidars actuellement populaires sont principalement divisés en 16, 32, 64 et 128 lignes de lidars. Sa plage de mesure est d'environ 200 mètres et son champ de vision vertical est de 30 à 50 degrés.
- Les capteurs de caméra peuvent être grossièrement divisés en types monoculaires, binoculaires et fisheye. Généralement, les véhicules autonomes sont équipés de caméras avec un champ de vision horizontal de 90 à 210 degrés et un champ de vision vertical de 90 à 180 degrés.
- Le radar à ondes millimétriques peut être divisé en radar à courte portée et radar à longue portée en fonction de la distance. Parmi eux, la portée du radar à courte portée est d'environ 5 mètres, le champ de vision horizontal est de 5 à 20 degrés et le champ de vision vertical est de 10 à 35 degrés. La portée du radar longue portée peut être d'environ 200 mètres, avec un champ de vision horizontal et vertical de 35 à 80 degrés.
Après avoir obtenu les informations collectées par ces différents capteurs, la technologie de cartographie SLAM peut être utilisée pour reconstruire l'environnement autour du véhicule autonome, positionnant ainsi le véhicule. La technologie de cartographie SLAM peut être divisée en deux catégories suivantes : Méthode de cartographie directe : suivi de l'intensité des données qui change lorsque le capteur se déplace pour estimer l'attitude du capteur. Cependant, comme ce type de méthode est facilement affecté par les changements d’éclairage et ne permet pas de délocalisation, les méthodes de cartographie actuelles sont rarement basées sur ce type de méthode.
- Méthode de cartographie basée sur les caractéristiques : ce type de méthode obtient d'abord les points caractéristiques des objets environnants à partir des informations du capteur. Les points caractéristiques reçus du même objet sont projetés sur deux coordonnées de capteur différentes, et la position de la cible est estimée en calculant la relation géométrique des points projetés.
Étant donné que le principal scénario d'application du système de stationnement automatique est dans le parking et qu'il y aura de nombreux véhicules garés dans le parking, la technologie anti-collision est très importante . Dans la technologie anti-collision, les capteurs à ultrasons
,capteurs radar à ondes courtes, capteurs lidar et capteurs de caméra sont principalement utilisés. Les capteurs acoustiques et radar sont principalement utilisés pour obtenir une télémétrie précise. Les capteurs de caméra utilisent principalement la différence de position d’un même objet dans des images consécutives pour estimer la distance en profondeur.
Technologie de détection des places de stationnementLa détection des places de stationnement est effectuée en continu pendant le processus de recherche et de conduite et comprend généralement la vision par ordinateur traditionnelle, l'apprentissage en profondeur et une mise en œuvre hybride des deux méthodes.
La vision par ordinateur traditionnelle spécifie et identifie principalement la forme des espaces de stationnement, telle que la détection des lignes d'espace de stationnement et la détection des points caractéristiques, comme le montre la figure ci-dessous.Exemple de forme de place de stationnement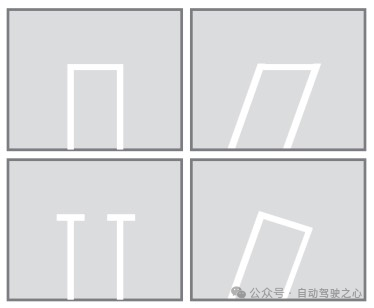
Processus de détection de place de stationnement basé sur un réseau neuronal convolutif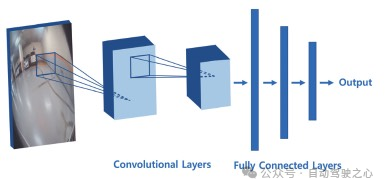
Processus de stationnement automatique
Si le processus de recherche et de conduite de l'étape précédente trouve une place de stationnement disponible, le système appellera le processus de stationnement automatique. Généralement, nous utilisons des méthodes de génération de chemin pour mettre en œuvre le processus de stationnement autonome. Actuellement, les méthodes traditionnelles de génération de chemins incluent principalement des méthodes basées sur des algorithmes et des méthodes basées sur l'apprentissage par renforcement.
L'approche basée sur un algorithme consiste à calculer l'emplacement et la forme du chemin menant à l'espace de stationnement ainsi que l'emplacement actuel du véhicule. Afin de calculer un chemin de stationnement approprié, l'algorithme implique des algorithmes tels que des problèmes de contrôle optimal, des méthodes de planification de chemin basées sur une grille et une exploration rapide d'arbres aléatoires.
Les méthodes basées sur l'apprentissage par renforcement peuvent générer des chemins optimaux pour les processus de stationnement autonomes dans des simulateurs de stationnement autonomes. Dans un simulateur de stationnement autonome, le véhicule apprend une procédure de stationnement commune. Cette méthode d'apprentissage obtient en continu le chemin optimal avec la plus grande précision de stationnement en répétant le processus de génération et d'évaluation du chemin, comme le montre la figure ci-dessous.
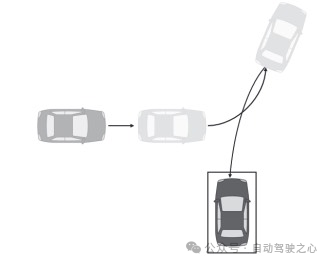
Processus de stationnement inversé du stationnement automatique
Processus de retour à la conduite
Le processus de retour à la conduite signifie que lorsque le véhicule autonome entre dans l'espace de stationnement et attend, l'utilisateur peut appeler le véhicule pour le faire bouger Allez à l'endroit spécifié par l'utilisateur. Dans ce processus, nous devons utiliser la technologie de suivi de chemin.
Actuellement, la technologie de suivi de chemin comprend des méthodes de suivi des chemins de déplacement et des méthodes de suivi des chemins modifiés. Cependant, les deux méthodes utilisent des algorithmes de contrôle de véhicule similaires. Pour plus de détails, veuillez vous référer au document [1-2]. L'idée générale est d'exécuter la commande de contrôle pour déplacer le véhicule le long de la trajectoire générée, en tenant compte de la position actuelle du véhicule et des conditions d'angle de braquage.
Conclusion
En raison de la demande croissante de technologie de stationnement automatique, divers pays et fabricants développent vigoureusement des systèmes de stationnement automatique. Compte tenu du développement rapide de la technologie de stationnement automatique, dans cet article, nous résumons les tendances en matière de normalisation, les normes d'évaluation et les divers composants des systèmes de stationnement automatique dans les systèmes de stationnement automatique et les présentons en détail. Nous espérons que cela pourra être utile à tout le monde.

Lien original : https://mp.weixin.qq.com/s/UPwW0E8LTX5V79GK12HF_Q
Ce qui précède est le contenu détaillé de. pour plus d'informations, suivez d'autres articles connexes sur le site Web de PHP en chinois!
Articles Liés
Voir plus- Quel outil de développement h5 est le meilleur ? Évaluation des trois meilleurs outils de production de pages HTML5
- ThinkPHP Db et évaluation des performances du modèle
- L'agence de presse Xinhua et l'Université de Pékin ont publié une vaste évaluation du modèle d'IA : la sécurité et la fiabilité sont au centre de l'attention, et 360 Intelligent Brain fonctionne bien
- Test de l'ASUS ZenBook Pro14 2023 ? Test pratique d'un vrai téléphone
- Test du Huawei P60 Pro : analyse complète de l'écran, de la communication, du système et de la durée de vie de la batterie