
Maison >Périphériques technologiques >IA >Apollo s'associe à Carsim/TruckSim pour une simulation conjointe
Apollo s'associe à Carsim/TruckSim pour une simulation conjointe

- WBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBavant
- 2024-01-13 16:51:161430parcourir
1. Contexte
La simulation joue un rôle important dans la recherche et le développement de la conduite autonome. Elle peut considérablement améliorer l'efficacité de la recherche et du développement et garantir la fiabilité des algorithmes. En tant qu'excellente plate-forme open source, le système Baidu Apollo est très adapté aux recherches d'amis intéressés par l'apprentissage de la conduite autonome. De plus, Carsim/Trucksim est un outil de simulation de dynamique de véhicule classique très respecté.
Cet article présente la méthode de réalisation d'une simulation locale en temps réel grâce à la combinaison d'Apollo et de Trucksim. Il convient aux débutants pour construire une plateforme de simulation et étudier le système Apollo.
2. Conception de l'architecture
Le code de base du projet Apollo est implémenté en C++. Les interfaces courantes pour Trucksim incluent Simulink, Python et le langage C. Cet article présentera d'abord l'architecture de la simulation conjointe Apollo, simulink et Trucksim, et discutera des problèmes existants dans ce système de simulation. Ensuite, nous nous concentrerons sur la simulation conjointe d'Apollo et Trucksim.
2.1 Solutions Apollo, simulink et Trucksim
Simulink et Apollo peuvent communiquer via ROS. Étant donné que le format de données des messages d'Apollo est protobuf et que l'outil ROS de Simulink ne prend en charge que les messages ROS standard (ROS msg), un nœud de conversion de format peut être ajouté à Apollo pour assurer la compatibilité. Concernant la solution de Simulink appelant Trucksim, il existe de nombreuses ressources de référence sur Internet, je n'entrerai donc pas dans les détails.
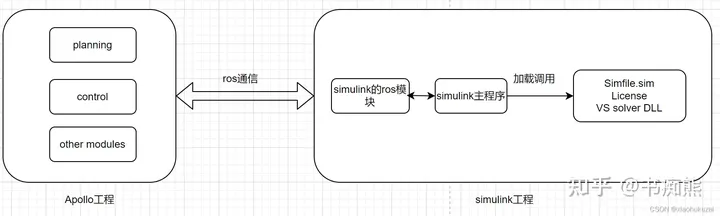
schéma de la solution simulink
2.2 Solutions Apollo, Rosbridge et Trucksim
Établir une communication websocket entre le projet QT et le projet Apollo. Dans le projet Apollo, la conversion mutuelle entre messages ros (ou cyber messages) et websockets est réalisée en ajoutant le module rosbridge (ou cyber_bridge). Le projet QT est implémenté en C++ en tant que client websocket et fait appel à la bibliothèque dynamique de Trucksim pour réaliser la fonction d'exécution de Trucksim en temps réel.
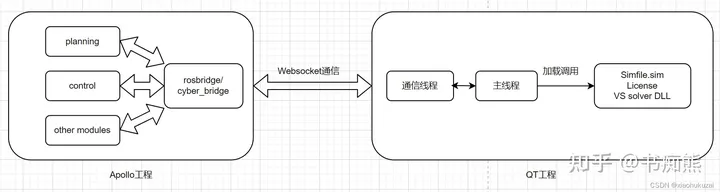
Schéma de la solution Rosbridge
3. Implémentation des fonctions
3.1 Solutions Apollo, Simulink et Trucksim
3.1.1 Configuration Simulink
La boîte à outils Simulink dispose d'un package de support ROS pour configurer le réseau ROS. dans la figure 2. Le nom d'hôte/l'adresse IP et le port sont respectivement l'adresse et le numéro de port de ROS_MASTER_URI, qui sont expliqués dans le mécanisme de communication ci-dessus.
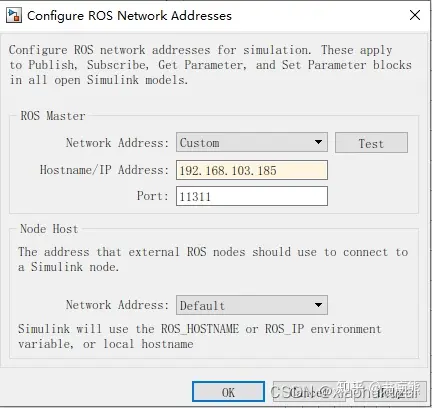
Configurez l'adresse réseau ROS
L'abonné ROS reçoit des messages de l'interface, donc le sujet, le type de message et l'heure d'échantillonnage doivent correspondre au programme dans l'interface.

Configurer l'abonnement à ros
Afin de faciliter le débogage et la vérification, démarrez maintenant ROS côté MATLAB. Le processus de configuration est le suivant :
Instructions de configuration MATLAB :
>> setenv('ROS_MASTER_URI','http://192.168.103.122:11311')>> setenv('ROS_IP','192.168.103.198')>> rosinit('192.168.103.122')
3.1.2 Configuration de TruckSim
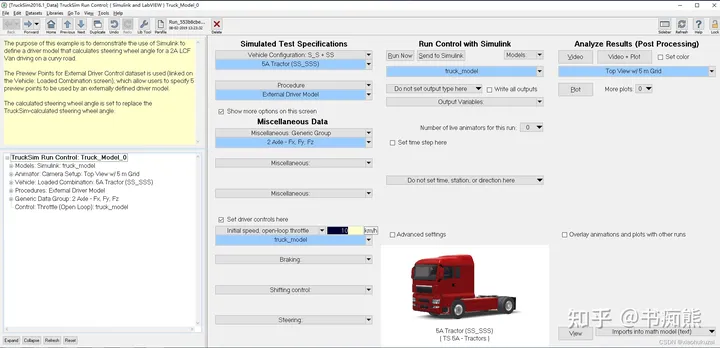
Interface de configuration
Trucksim est une programmation basée sur un assistant, une interface de configuration des paramètres : sélection de camion 5A Tractor (SS_SSS) , voir les paramètres spécifiques Figure 3. Interface de contrôle : Sélectionnez simulink pour Modèles.
Interface principale
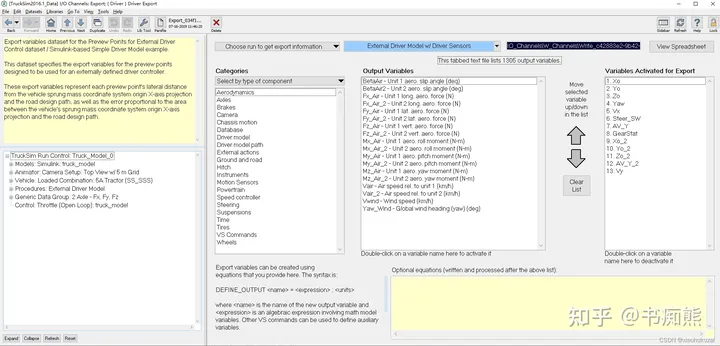
Interface de configuration des paramètres d'entrée
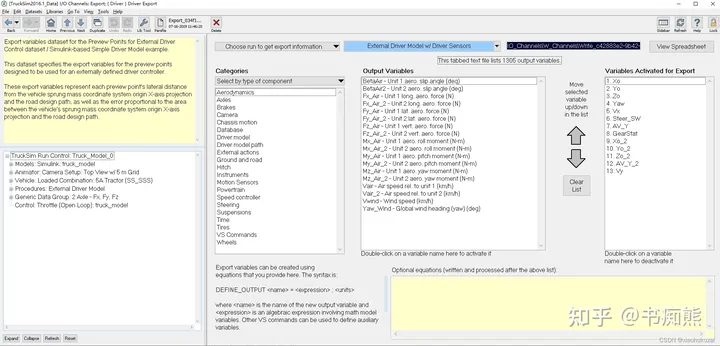
Interface de configuration des paramètres de sortie
3.2 Solutions Apollo, Rosbridge et Trucksim
3.2.1 Configuration de Rosbridge dans Apollo
installation de Rosbridge en ligne Il existe de nombreux tutoriels, je n'entrerai donc pas dans les détails dans cet article.
L'utilisation est la suivante :
cd ros_pkgs_ws
catkin_make
Démarrer rosbridge
source /apollo/ros_pkgs_ws/devel/setup.bash
PATH=/usr/local/miniconda2/bin:$PATH
rosla unch rosbridge_server rosbridge_websocket .launch
3.2.1 Instructions de configuration du projet Qt
3.2.1.1 Informations sur la version de Qt et CMake

3.2.1.3 Définition de l'interface du projet Apollo et du projet QT
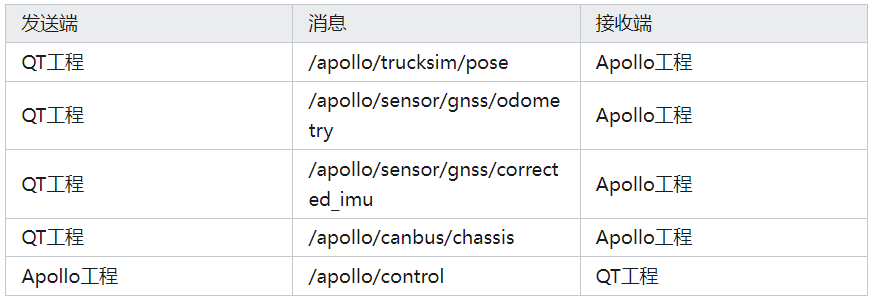
/a pollo/trucksim / pose
{"op":"publish","topic":"/apollo/tucksim/pose","msg": {"header": {"timestamp_sec":1572253610.76292, "sequence_num":77}, "trucksimpose": {"XCG_TM":30.9964522249, // 单位:m "YCG_TM":0.657853758823, // 单位:m "ZCG_TM":1.00644079555, // 单位:m "YAW":-0.015505948987, // 单位:rad "VX":7.81497285565, // 单位:m/s "STEER_SW":2.84450684087, // 单位:rad "AV_Y":0.133153549217, // 单位:rad/s "GEARSTAT":5.0, // 无单位 "XCG_TM2":22.5890979801, // 单位:m "YCG_TM2":-0.471483304991, // 单位:m "ZCG_TM2":2.08466406388, // 单位:m "YAW_2":-0.0253130178796, // 单位:rad "VY":0.326368169782, // 单位:m/s "DISTANCE":31.0034324244, // 单位:m "DELTA_YAW":-0.015505948987, // 单位:rad "DISTANCE_2":22.5940178822, // 单位:m "DELTA_YAW_2":-0.0253130178796 // 单位:rad/s } }}
4. 使用心得
- TruckSim模型离散时间补偿设置为0.001s,即模型更新频率为1000hz,选择每个步长更新两次的积分方法(如:AM-2, RK-2等)。
注释:
1)真车是一个高阶非线性连续系统,TruckSim通过固定时间步长离散系统来模拟真车,当模型步长选择较大时(如之前设置的0.01s),模型较不准;TruckSim模型是由悬架系统-动力系统-转向系统-制动系统-轮胎模型-空气动力学等系统构成的复杂系统,当其中一个或多个系统因为时间步长太大而很不准时,就会出现车抖动比较明显的现象。
2)模型更新频率设为1000hz是TruckSim官网推荐的,经验证,这个频率能解决车抖动问题。
- 接口线程加载频率用定时器控制,加载调用simfile.sim,license和DLL的频率设置为1000hz,与Trucksim模型离散步长一致。
注释:
受3中积分方法决定,当选择每个步长更新两次的积分方法,VS_EXT_EQ_IN和VS_EXT_EQ_OUT更新频率是加载频率的2倍,为2000hz。

原文链接:https://mp.weixin.qq.com/s/8QNp5iQebE3lPJzEgq_bOA
Ce qui précède est le contenu détaillé de. pour plus d'informations, suivez d'autres articles connexes sur le site Web de PHP en chinois!
Articles Liés
Voir plus- Comment dessiner des courbes avec l'outil stylet PS
- Un article sur l'application de la technologie SLAM à la conduite autonome
- Combien de temps faudra-t-il pour parvenir à la conduite autonome ?
- Vous pouvez douter de la sécurité de la conduite autonome, mais le big data vous le dit : elle conduit mieux que vous
- Un article pour comprendre la perception lidar et fusion visuelle de la conduite autonome