
Maison >Périphériques technologiques >IA >Le robot DeepMind de Google a publié trois résultats d'affilée ! Les deux capacités ont été entièrement améliorées et le système de collecte de données peut gérer 20 robots en même temps.
Le robot DeepMind de Google a publié trois résultats d'affilée ! Les deux capacités ont été entièrement améliorées et le système de collecte de données peut gérer 20 robots en même temps.

- 王林avant
- 2024-01-11 22:36:04837parcourir
Presque en même temps que le robot « Shrimp Fried and Dishwashing » de Stanford, Google DeepMind a également publié ses derniers résultats en matière d'intelligence incarnée.
et c'est trois plans consécutifs :
Tout d'abord, un nouveau modèle qui se concentre sur l'amélioration de la vitesse de prise de décision, ce qui augmente la vitesse de fonctionnement du robot (par rapport au transformateur robotique d'origine) de 14 % - rapide Dans le même temps, la qualité n'a pas diminué et la précision a augmenté de 10,6 %.
Ensuite, il existe un nouveau cadre spécialisé dans les capacités de généralisation, qui peut créer des invites de trajectoire de mouvement pour le robot, lui permettant de faire face à 41 tâches inédites et d'atteindre un taux de réussite de 63 %.
Ne sous-estimez pas ce tableau, Par rapport aux 29% précédents, l'amélioration est assez importante.
Le dernier est un système de collecte de données sur les robots, qui peut gérer 20 robots à la fois. Jusqu'à présent, 77 000 données expérimentales ont été collectées à partir de leurs activités. Elles aideront Google à mieux mener à bien les travaux de formation ultérieurs.
Alors, quels sont ces trois résultats spécifiquement ? Regardons-les un par un.
La première étape dans l'application quotidienne des robots : vous pouvez effectuer directement des tâches que vous n'avez jamais vues auparavant
Google a souligné que pour réaliser un robot capable de véritablement entrer dans le monde réel, deux défis fondamentaux doivent être résolus.
1. Nouvelle capacité de promotion de tâches
2. Améliorer la vitesse de prise de décision
Les deux premiers résultats de cette série en trois parties sont principalement des améliorations dans ces deux domaines, et tous deux sont basés sur le modèle de robot de base de Google, Robotics Transformer( En abrégé RT) .
Regardons d'abord le premier : RT-Trajectory qui aide les robots à généraliser.
Pour les humains, des tâches telles que nettoyer la table sont faciles à comprendre, mais les robots ne les comprennent pas très bien.
Mais heureusement, nous pouvons lui transmettre cette instruction de diverses manières possibles, afin qu'il puisse entreprendre de véritables actions physiques.
D'une manière générale, la méthode traditionnelle consiste à mapper la tâche en une action spécifique, puis à laisser le bras du robot la terminer. Par exemple, essuyer la table peut être démonté en « fermez la pince, bougez à gauche, bougez à droite ».
Évidemment, la capacité de généralisation de cette méthode est très faible.
Ici, la nouvelle trajectoire RT proposée par Google apprend au robot à effectuer des tâches en lui fournissant des repères visuels.
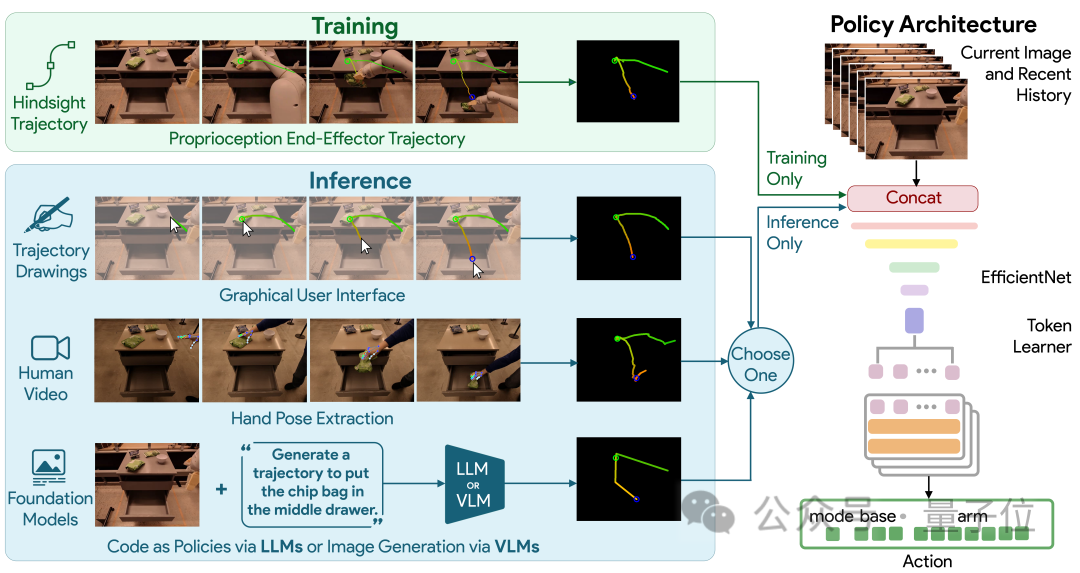
Plus précisément, les robots contrôlés par RT-Trajectory ajouteront des données améliorées de trajectoire 2D pendant l'entraînement.
Ces trajectoires sont présentées sous forme d'images RVB, comprenant des itinéraires et des points clés, fournissant des conseils de bas niveau mais très utiles à mesure que le robot apprend à effectuer des tâches.
Avec ce modèle, le taux de réussite des robots effectuant des tâches inédites a été directement augmenté jusqu'à 1 fois (par rapport au modèle de robot de base RT-2 de Google, de 29% => 63%) .
Ce qui mérite d'être mentionné, c'est que RT-Trajectory peut créer des trajectoires de diverses manières, notamment :
en regardant des démonstrations humaines, en acceptant des croquis dessinés à la main et générés par VLM (Modèle de langage visuel).
La deuxième étape de la robotisation quotidienne : la vitesse de prise de décision doit être rapide
Une fois la capacité de généralisation améliorée, nous nous concentrerons sur la vitesse de prise de décision.
Le modèle RT de Google utilise l'architecture Transformer Bien que le Transformer soit puissant, il s'appuie fortement sur le module d'attention à complexité quadratique.
Par conséquent, une fois que l'entrée du modèle RT est doublée (par exemple, en équipant le robot d'un capteur à plus haute résolution) , les ressources informatiques nécessaires pour le traiter augmenteront jusqu'à quatre fois, ce qui ralentira sérieusement la décision. -vitesse de fabrication.
Afin d'améliorer la vitesse des robots, Google a développé SARA-RT sur le modèle de base Robotics Transformer.
SARA-RT utilise une nouvelle méthode de réglage fin du modèle pour rendre le modèle RT d'origine plus efficace.
Cette méthode est appelée "up training" par Google. Sa fonction principale est de convertir la complexité quadratique originale en complexité linéaire tout en conservant la qualité du traitement.
Lorsque SARA-RT est appliqué au modèle RT-2 avec des milliards de paramètres, ce dernier peut atteindre des vitesses de fonctionnement plus rapides et une plus grande précision sur une variété de tâches.
Il convient également de mentionner que SARA-RT fournit une méthode universelle pour accélérer Transformer sans pré-formation coûteuse, afin qu'il puisse être bien promu.
Pas assez de données ? Créez-le vous-même
Enfin, afin d'aider les robots à mieux comprendre les tâches assignées par les humains, Google est également parti des données et a directement construit un système de collecte : AutoRT.
Ce système combine de grands modèles (y compris LLM et VLM) avec des modèles de contrôle de robot (RT) pour diriger en continu le robot afin qu'il effectue diverses tâches dans le monde réel, générant et collectant ainsi des données.
Le processus spécifique est le suivant :
Laissez le robot contacter "librement" l'environnement et se rapprocher de la cible.
Utilisez ensuite l'appareil photo et le modèle VLM pour décrire la scène devant vous, y compris les éléments spécifiques.
Ensuite, LLM utilise ces informations pour générer plusieurs tâches différentes.
Veuillez noter qu'après avoir été généré, le robot ne sera pas exécuté immédiatement. Au lieu de cela, LLM sera utilisé pour filtrerquelles tâches peuvent être accomplies indépendamment, lesquelles nécessitent un contrôle à distance humain et lesquelles ne peuvent pas être accomplies. tous.
Ce qui ne peut pas être fait, c'est "ouvrir le sac de chips" car cela nécessite deux bras robotisés (1 seulement par défaut) .
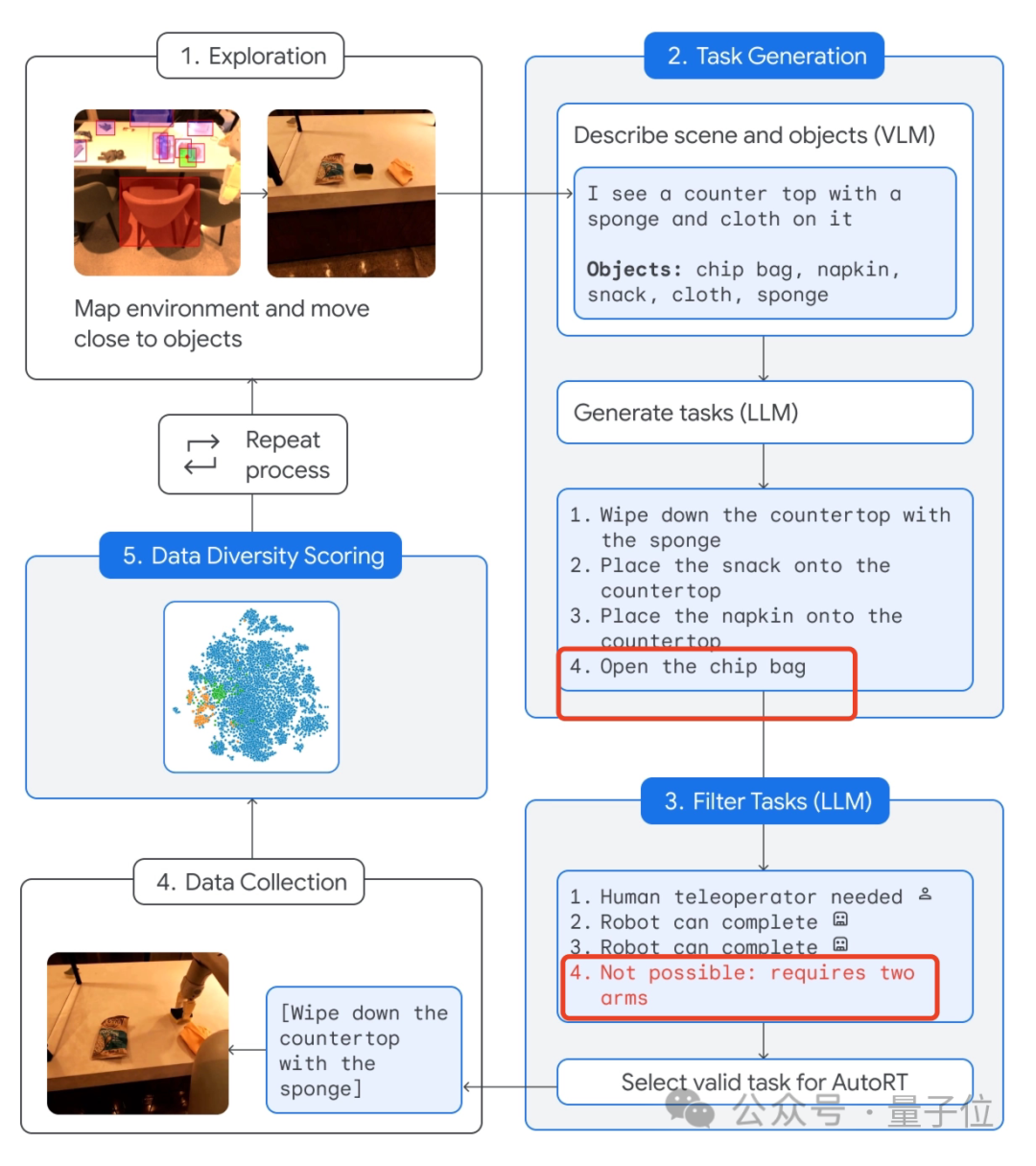
Ensuite, après avoir terminé cette tâche de dépistage, le robot peut réellement l'exécuter.
Enfin, le système AutoRT finalise la collecte de données et effectue une évaluation de la diversité.
Selon les rapports, AutoRT peut coordonner jusqu'à 20 robots à la fois. En 7 mois, un total de 77 000 données de test, dont 6 650 tâches uniques, ont été collectées.
Enfin, pour ce système, Google met également l'accent sur la sécurité.
Après tout, les tâches de collecte d’AutoRT s’appliquent au monde réel et les « garde-corps de sécurité » sont indispensables.
Plus précisément, le code de sécurité de base, fourni par le LLM qui contrôle les tâches des robots, s'inspire en partie des trois lois de la robotique d'Isaac Asimov – avant tout « Un robot ne doit pas nuire à un être humain
La deuxième exigence est. » que le robot ne doit pas tenter de tâches impliquant des humains, des animaux, des objets pointus ou des appareils électriques
Mais cela ne suffit pas
AutoRT est donc également équipé de plusieurs niveaux de mesures de sécurité pratiques dans la robotique ordinaire. Par exemple, le robot s'arrête automatiquement lorsque. la force exercée sur ses articulations dépasse un seuil donné, toutes les actions peuvent être stoppées par des interrupteurs physiques qui restent à la vue humaine, et plus encore
 Envie d'en savoir plus sur cette dernière fournée de résultats de Google
Envie d'en savoir plus sur cette dernière fournée de résultats de Google
Bonne nouvelle, sauf ? pour RT-Trajectory, qui publie uniquement des articles, le reste est publié avec le code et les articles. Vous êtes invités à vérifier plus ~
One More Thing
En parlant des robots Google, nous devons mentionner
RT-2. (Tous les résultats de cet article sont également basés sur cela) Ce modèle a nécessité 7 mois de travail de 54 chercheurs de Google et est sorti fin juillet de cette année
Il intègre le multimodal visuel-texte. modèle VLM, peut non seulement comprendre les « mots humains », mais peut également raisonner sur les « mots humains » et effectuer certaines tâches qui ne peuvent pas être accomplies en une seule étape, comme ramasser avec précision les « animaux disparus » de trois jouets en plastique : des lions, baleines et dinosaures", très étonnant.Maintenant, en un peu plus de 5 mois, il a connu des améliorations rapides de ses capacités de généralisation et de sa vitesse de prise de décision. Nous ne pouvons nous empêcher de soupirer : je ne peux pas imaginer. qu'un robot va vraiment se précipiter dans le monde. À quelle vitesse cela sera-t-il pour des milliers de foyers ?
Ce qui précède est le contenu détaillé de. pour plus d'informations, suivez d'autres articles connexes sur le site Web de PHP en chinois!
Articles Liés
Voir plus- Quel est l'emplacement de la fonction principale dans le programme source c ?
- Quel logiciel est le plugin Tencent Qqmail ?
- Former BERT et ResNet sur un smartphone pour la première fois, réduisant ainsi la consommation d'énergie de 35 %
- La formation ViT et MAE réduit la quantité de calcul de moitié ! Sea et l'Université de Pékin ont proposé conjointement l'optimiseur efficace Adan, qui peut être utilisé pour les modèles profonds
- Les données synthétiques seront-elles le moteur de l'avenir de la formation IA/ML ?