
Maison >Périphériques technologiques >IA >Une brève discussion sur les paramètres du capteur d'image automobile - rapport signal/bruit
Une brève discussion sur les paramètres du capteur d'image automobile - rapport signal/bruit

- 王林avant
- 2023-11-21 14:33:36872parcourir
Auteur | William Chen, responsable de l'ingénierie des applications automobiles, ON Semiconductor China
La conduite intelligente est progressivement devenue une caractéristique commune des voitures. Elle améliore la perception des voitures et des conducteurs, réduit l'intensité du travail du conducteur et en même temps. temps Il peut améliorer efficacement la sécurité de conduite. Parmi eux, la caméra basée sur le capteur d'image CMOS est l'un des principaux outils permettant au système de conduite intelligente de percevoir l'environnement extérieur.
Le capteur d'image CMOS est un capteur d'imagerie, qui est essentiellement une combinaison de mémoire et de conversion analogique-numérique (ADC). Basée sur l'effet photoélectrique du silicium, la lumière incidente excitera des charges dans les photodiodes des pixels du capteur. Les charges sont collectées et stockées, puis converties en sortie numérique via le ADC.
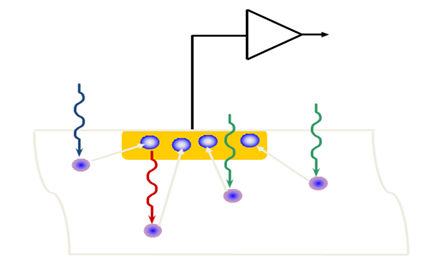
Figure 1Effet photoélectrique
Architecturalement, un capteur d'image CMOS est similaire à une mémoire, qui possède un grand nombre de cellules de stockage prenant en charge la somme des lignes. La différence entre les opérations d'adressage des colonnes est que la mémoire est écrite par des circuits, tandis que le contenu du sensor est écrit par la lumière visible ou la lumière proche infrarouge.
La charge collectée par le capteur comprend deux parties : une partie est la charge que nous attendons, qui provient du signal efficace stimulé par la lumière ambiante, l'autre partie est la charge générée par les éléments indésirables de l'utilisateur ; interférence, qui est la source de l'interférence. Il en existe de nombreux types, généralement appelés bruit.
Nous espérons que plus les informations dans l'image sont efficaces, mieux c'est, et moins il y a de bruit d'interférence, mieux c'est. Un indicateur courant pour mesurer l’effet du bruit d’image est le rapport signal/bruit SNR, qui est le rapport signal/bruit. Plus le rapport signal/bruit est élevé, plus le contenu relatif du bruit de l’image est faible et meilleure est la qualité de l’image. L'unité du SNR peut être un rapport, ou elle peut être convertie en unité logarithmique dB. La fiche technique du capteur fournit généralement le paramètre de rapport signal sur bruit SNR, comme indiqué ci-dessous.
Il y a une question courante : un capteur avec un rapport signal/bruit de
46
43dB en basse lumière ?

La réponse n'est pas forcément, les conclusions qui sont hors d'état tombent souvent dans le gouffre. Le SNR n'est pas un point, il est fonction des conditions d'éclairage. Comme le montre la figure 2, le SNR deviendra une courbe à mesure que l'intensité lumineuse change. Lorsqu'il est utilisé comme indicateur d'effet de faible luminosité, il est nécessaire de sélectionner la valeur SNR dans des conditions de faible luminosité. Le paramètre SNR sur le manuel des données du capteur dans l'industrie est généralement la valeur SNR maximale, qui correspond à la valeur SNR lorsque l'environnement d'éclairage est très lumineux, c'est-à-dire le point SNR Max dans le coin supérieur droit du Courbe SNR bleue sur l'image. La valeur SNR dans la zone où se trouve la ligne bleue dans le coin inférieur gauche convient comme paramètre pour évaluer la faible luminosité. L'éclairage à ce moment est insuffisant et correspond à un environnement de faible luminosité. C'est comme vendre des pommes. La couche supérieure est la meilleure. Vous devez ouvrir le panier pour voir la qualité des pommes à l'intérieur.
Figure 2
Rapport signal/bruit Courbe SNRJuger le capteur en fonction du point SNR maximum problème de généralisation excessive. Selon les besoins, l'utilisateur peut sélectionner la taille du SNR correspondant aux conditions d'exposition spécifiques pour évaluer le bruit de faible luminosité. Plus le SNR est grand, mieux l'utilisateur peut également limiter le SNR à une valeur fixe, par exemple lorsque le SNR est atteint.
=5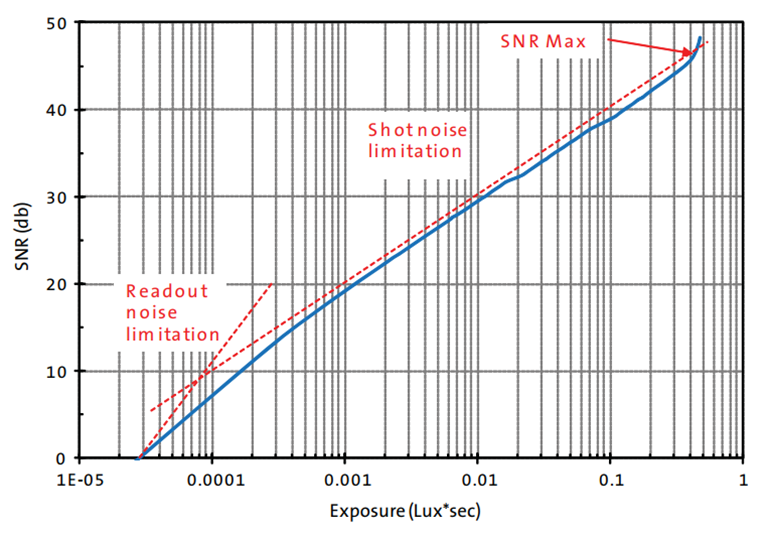 , utilisez la valeur requise à ce moment. La valeur d'exposition des conditions d'exposition est utilisée pour évaluer le bruit de faible luminosité, ce qui signifie que moins de ressources d'éclairage sont nécessaires pour obtenir le même SNR et celui du capteur. les performances en basse lumière sont meilleures.
, utilisez la valeur requise à ce moment. La valeur d'exposition des conditions d'exposition est utilisée pour évaluer le bruit de faible luminosité, ce qui signifie que moins de ressources d'éclairage sont nécessaires pour obtenir le même SNR et celui du capteur. les performances en basse lumière sont meilleures.
La figure 2 montre le SNR d'un capteur ordinaire, qui est une courbe croissante de façon monotone. Le capteur CMOS utilisé dans les voitures nécessite une plage dynamique élevée HDR afin de s'adapter aux scénarios d'application tous temps. La méthode courante pour le HDR consiste à modifier la sensibilité du capteur, à échantillonner séparément les différentes luminosités de l'environnement, puis à les utiliser. combinez les multiples images échantillonnées Map à un espace de données linéaire standardisé, et enfin sélectionnez les pixels appropriés à partir d'images de différentes sensibilités pour former un cadre d'image complet. Voir "Petite discussion sur les paramètres du capteur d'image automobile - Plage dynamique".
Le changement de sensibilité du capteur correspond au déplacement de la ligne SNR dans le système de coordonnées vers différentes positions. Enfin, la courbe SNR de l'image HDR évolue vers le résultat approprié de plusieurs courbes SNR, telles que la ligne bleue sur la figure 3, il ne s'agit plus d'une courbe croissante de manière monotone. En plus du fait que le SNR en basse lumière est très faible, il y aura également plusieurs minima locaux dans la plage de surbrillance lorsque le point de fonctionnement tombe dans la plage de baisse du SNR. même si l'environnement est très lumineux à ce moment-là, le bruit Cela va également empirer.
Ce phénomène apparaîtra dans l'image qui va à l'encontre des habitudes de perception de l'œil humain, c'est-à-dire qu'à mesure que la luminosité augmente, la qualité de l'image passera de mauvaise à bonne, puis se détériorer à nouveau soudainement. Par conséquent, contrairement aux capteurs linéaires traditionnels, le rapport signal/bruit des capteurs dynamiques automobiles doit également évaluer l'indice de valeur minimale dans des conditions de luminosité élevée.
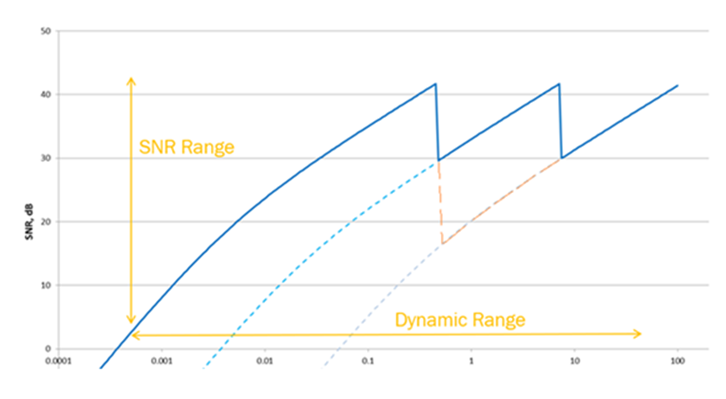
Figure 3 SNR de l'image HDR
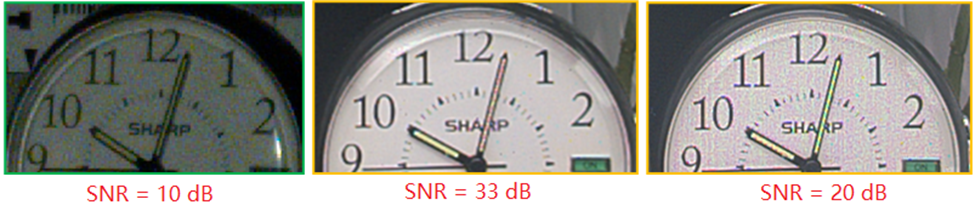
Figure 4 SNR et bruit
Le SNR d'un capteur automobile est une courbe non monotone, et l'environnement d'application automobile rendra le problème plus compliqué. Le capteur est un appareil analogique. Avant l'ADC, les données de signal et de bruit sont stockées sous forme de charges. Le courant d'obscurité du capteur accumulera également des charges. Sa vitesse de génération est à peu près proportionnelle au temps d'exposition et exponentiellement liée à la température. . Nous devons donc également considérer les effets de la température, du temps d’exposition et du gain analogique sur le bruit dans l’obscurité. Le SNR est fonction à la fois de la température, du temps d'exposition et du gain de simulation, et sa courbe est devenue un groupe de courbes multidimensionnelles.
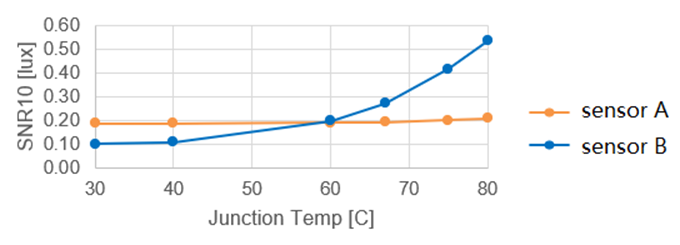
En prenant l'influence de la température comme exemple, la figure 5 est la tendance changeante de la valeur de Exposition à mesure que la température interne du capteur augmente lorsque SNR = 10. Nous pouvons voir que différents capteurs ont des sensibilités différentes à la dérive de température. Les valeurs d'exposition SNR de ces deux capteurs se croisent à 60°C, ce qui signifie qu'à température ambiante 25. °C Lorsqu'elles sont évaluées séparément avec la température élevée 80℃, les conclusions SNR obtenues sont complètement opposées.
5 Influence de la température interne de la plaquette
Selon la température du cycle de vie de la distribution de caméras automobiles, plus de 8 8% Pendant le cycle de vie de , la température du nœud à l'intérieur du capteur dépasse 40℃, dépassant 80%fois. 65%temps La température de la section interne dépasse 80℃. L'influence de la dérive de température entraînera d'autres changements dans la courbe SNR. Comme le montre la ligne pointillée rouge sur la figure 6, lorsque la température augmente, la courbe SNR continue de diminuer dans les zones à faible éclairage et les zones locales mises en évidence.
Figure
6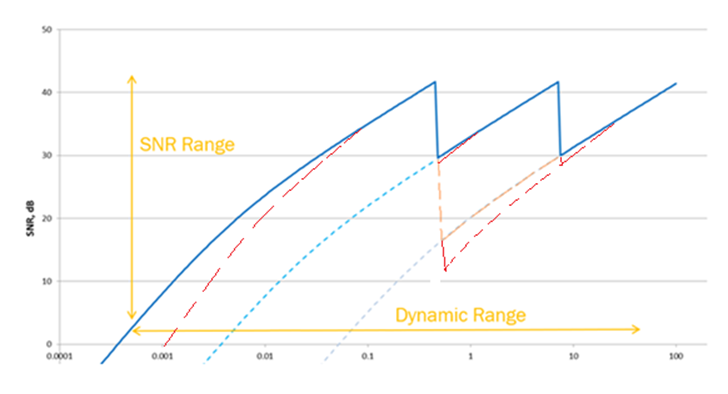
L'impact de la température sur le HDR SNR
Actuellement, l'évaluation par l'industrie du capteur d'image automobile SNR utilise souvent Testé européen selon la norme EMVA1288 de la Machine Vision Association. Le rapport signal/bruit SNR dans la norme EMVA1288 est défini sur la base du modèle de capteur linéaire monotone traditionnel, et la description des caractéristiques SNR du capteur d'image dynamique large automobile n'est pas complète. L'Institute of Electrical and Electronics Engineers IEEE définit une nouvelle norme de test de qualité P2020 pour les images automobiles. En tant que membre du groupe de travail, ON Semiconductor a entrepris le travail de rédaction de la norme de bruit d'image au sein de l'IEEE. Norme P2020 Cela inclut le paramètre SNR. Enfin, pour résumer, le rapport signal/bruit du capteur d'image CMOS automobile est un indicateur clé de la qualité de l'image. Il présente des caractéristiques non monotones et est affecté par de nombreux facteurs dans l'environnement des applications automobiles. du SNR est un travail d'évaluation complet multidimensionnel, une évaluation objective et complète du SNR peut véritablement décrire les performances du capteur et guider correctement le développement de produits d'imagerie automobile.
Ce qui précède est le contenu détaillé de. pour plus d'informations, suivez d'autres articles connexes sur le site Web de PHP en chinois!
Articles Liés
Voir plus- Où est la boîte à outils intelligente de wps
- Un article sur les systèmes décisionnels de conduite autonome
- Combien de temps faudra-t-il pour parvenir à la conduite autonome ?
- Avec une plate-forme en carbure de silicium 800 V+, Xpeng G6 crée une nouvelle ère de conduite intelligente
- Comment créer une application de simulation de conduite automobile fluide à l'aide de Vue et Canvas