
Maison >Périphériques technologiques >IA >Le langage, le démantèlement de robots, le MIT et d'autres utilisent GPT-4 pour générer des tâches de simulation et les migrer vers le monde réel
Le langage, le démantèlement de robots, le MIT et d'autres utilisent GPT-4 pour générer des tâches de simulation et les migrer vers le monde réel

- WBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBavant
- 2023-10-16 20:21:03957parcourir
Contenu réécrit comme : Machine Heart Report
Editeurs : Du Wei, Xiaozhou
GPT-4 et les robots ont créé de nouvelles étincelles.

Dans le domaine de la robotique, la mise en œuvre de stratégies robotiques universelles nécessite une grande quantité de données, et la collecte de ces données dans le monde réel prend du temps et est laborieuse. Bien que la simulation constitue une solution économique pour générer différents volumes de données au niveau de la scène et de l'instance, la diversité croissante des tâches dans les environnements simulés reste confrontée à des défis en raison de la grande quantité de main d'œuvre requise (en particulier pour les tâches complexes). Il en résulte des références de simulation artificielle typiques ne contenant généralement que des dizaines à des centaines de tâches.
Comment le résoudre ? Ces dernières années, les grands modèles de langage ont continué à faire des progrès significatifs dans le traitement du langage naturel et la génération de code pour diverses tâches. De même, le LLM a été appliqué à plusieurs aspects de la robotique, notamment les interfaces utilisateur, la planification des tâches et des mouvements, le résumé du journal du robot, la conception des coûts et des récompenses, révélant de solides capacités dans les tâches basées sur la physique et dans la génération de code.
Dans une étude récente, des chercheurs du MIT CSAIL, de l'Université Jiao Tong de Shanghai et d'autres institutions ont exploré plus en détail si le LLM pouvait être utilisé pour créer diverses tâches de simulation et explorer davantage leurs capacités.
Plus précisément, les chercheurs ont proposé un cadre basé sur LLM, GenSim, qui fournit un mécanisme automatisé pour concevoir et vérifier la disposition des actifs des tâches et la progression des tâches. Plus important encore, les tâches générées présentent une grande diversité, favorisant la généralisation des stratégies robotiques au niveau des tâches. De plus, sur le plan conceptuel, avec GenSim, les capacités de raisonnement et de codage de LLM sont affinées en stratégies verbales-visuelles-action grâce à la synthèse intermédiaire de données simulées.
Ce qui doit être réécrit c'est : Lien papier :
https://arxiv.org/pdf/2310.01361.pdf
Le framework GenSim se compose des trois parties suivantes :
- La première consiste à proposer de nouvelles tâches via des instructions en langage naturel et le mécanisme d'invite mis en œuvre par le code correspondant ;
- La seconde est une bibliothèque de tâches qui met en cache le code d'instructions de haute qualité généré précédemment pour la vérification et l'ajustement du modèle de langage et le renvoie sous la forme d'un ensemble de données de tâches complet ; Enfin, le processus de formation à la stratégie multitâche adapté au langage utilise les données générées pour améliorer les capacités de généralisation au niveau des tâches.
Dans la figure 1 ci-dessous, le chercheur a initialisé une bibliothèque de tâches contenant 10 tâches organisées manuellement, a utilisé GenSim pour l'étendre et générer plus de 100 tâches.
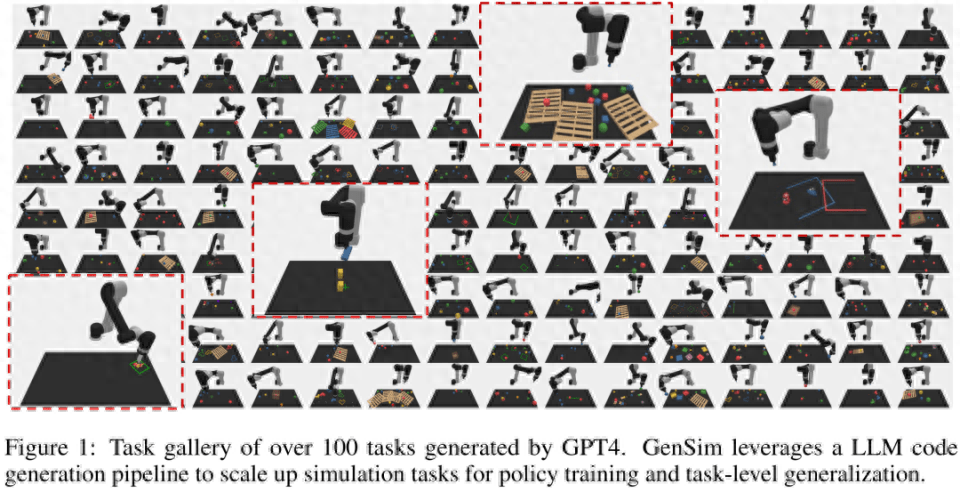
De plus, les chercheurs ont également formé des stratégies de robots multitâches, qui se sont bien généralisées sur toutes les tâches de génération et ont amélioré les performances de généralisation sans tir par rapport aux modèles formés uniquement sur des tâches de planification humaine. Une formation conjointe avec la tâche de génération GPT-4 peut améliorer les performances de généralisation de 50 % et transférer environ 40 % des tâches zéro-shot vers de nouvelles tâches dans les simulations.
Enfin, les chercheurs ont également envisagé le transfert de la simulation au réel, montrant que la pré-formation sur différentes tâches de simulation peut améliorer de 25 % la capacité de généralisation dans le monde réel.
En résumé, les politiques formées sur différentes tâches générées par LLM obtiennent une meilleure généralisation au niveau des tâches à de nouvelles tâches, soulignant le potentiel d'étendre les tâches simulées via LLM pour former les politiques de base.
Shubham Saboo, directeur de la gestion des produits chez Tenstorrent AI, a fait l'éloge de cette recherche. Il a déclaré qu'il s'agissait d'une recherche révolutionnaire sur GPT-4 combinée à des robots. Une série de tâches robotiques simulées sur pilote automatique sont générées via LLM telles que GPT-. 4. Faire de l’apprentissage sans tir et de l’adaptation des robots au monde réel une réalité.
Présentation de la méthode
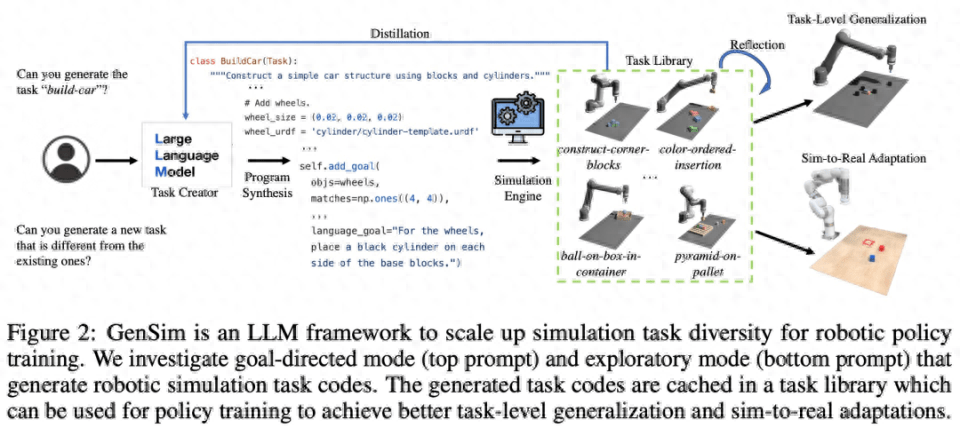
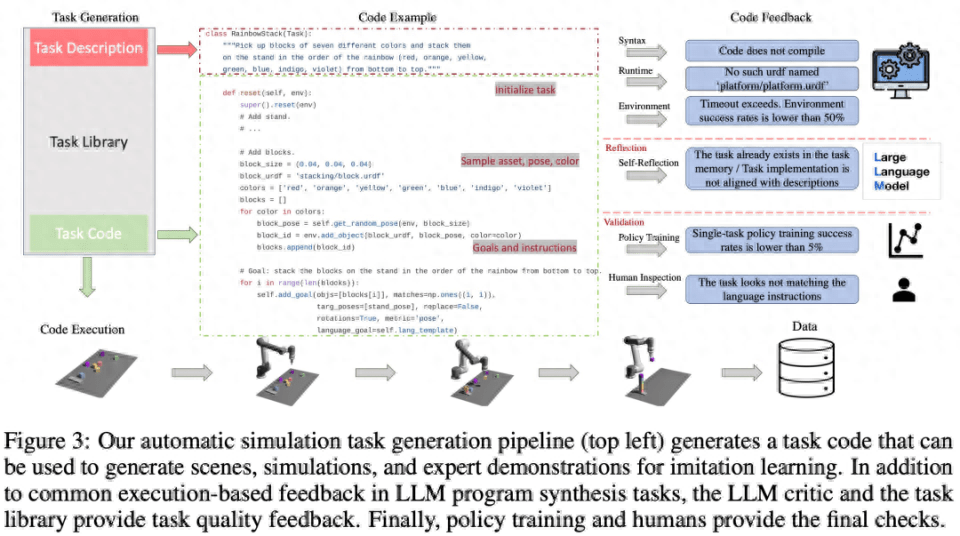
Comme le montre la figure 2 ci-dessous, le framework GenSim génère des environnements de simulation, des tâches et des démonstrations via la synthèse de programmes. Le pipeline GenSim démarre à partir du créateur de la tâche et la chaîne d'invites s'exécute en deux modes, le mode orienté vers un objectif et le mode exploratoire, en fonction de la tâche cible. La bibliothèque de tâches de GenSim est un composant en mémoire utilisé pour stocker des tâches de haute qualité générées précédemment. Les tâches stockées dans la bibliothèque de tâches peuvent être utilisées pour la formation aux politiques multitâches ou pour affiner le LLM.
Créateur de tâches
Comme le montre la figure 3 ci-dessous, la chaîne de langage générera d'abord la description de la tâche, puis générera l'implémentation associée. La description de la tâche comprend le nom de la tâche, les ressources et le résumé de la tâche. Cette étude utilise quelques exemples d'invites dans le pipeline pour générer du code.
Bibliothèque de tâches
La bibliothèque de tâches du framework GenSim stocke les tâches générées par le créateur de tâches pour générer de meilleures nouvelles tâches et former des stratégies multitâches. La bibliothèque de tâches est initialisée en fonction des tâches issues de benchmarks créés manuellement.
La bibliothèque de tâches fournit au créateur de la tâche la description de la tâche précédente comme condition pour la phase de génération de description, fournit le code précédent pour la phase de génération de code et invite le créateur de la tâche à sélectionner une tâche de référence dans la bibliothèque de tâches comme exemple pour écrire une nouvelle tâche. Une fois la mise en œuvre de la tâche terminée et tous les tests réussis, LLM est invité à « réfléchir » à la nouvelle tâche et à la bibliothèque de tâches, et à prendre une décision globale quant à savoir si la tâche nouvellement générée doit être ajoutée à la bibliothèque.
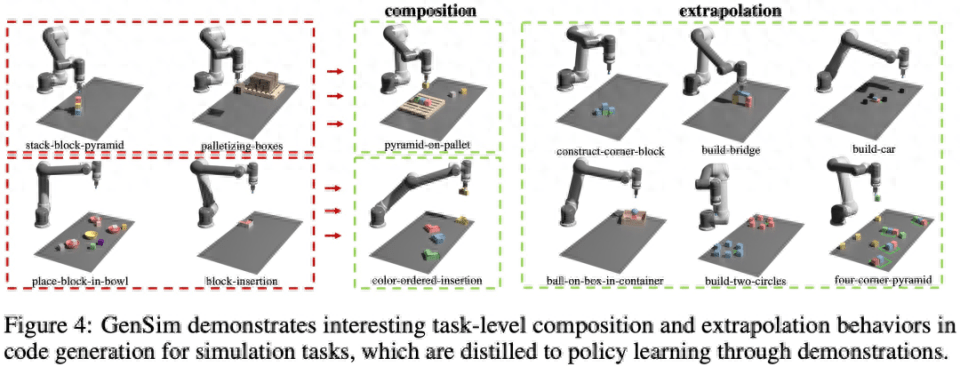
Comme le montre la figure 4 ci-dessous, l'étude a également observé que GenSim présente un comportement intéressant de combinaison et d'extrapolation au niveau des tâches :
Stratégie multi-tâches supervisée LLM
Après avoir généré des tâches, cette étude utilise ces implémentations de tâches pour générer des données de démonstration et former des politiques opérationnelles, en utilisant une architecture de réseau de transmission à double flux similaire à celle de Shridhar et al.
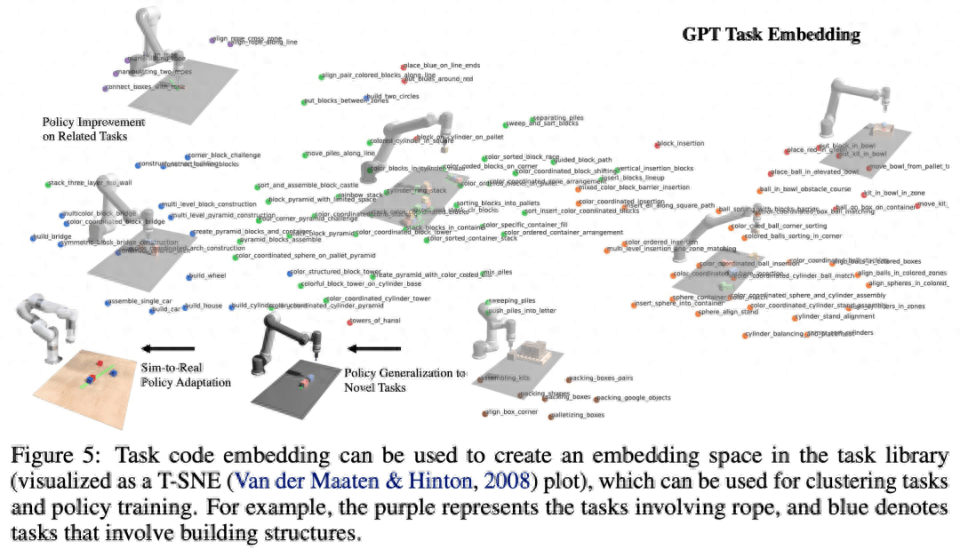
Comme le montre la figure 5 ci-dessous, cette étude considère le programme comme une représentation efficace de la tâche et des données de démonstration associées (Figure 5). Il est possible de définir un espace d'intégration entre les tâches, et son indice de distance est sensible à divers facteurs. la perception (telle que la pose et la forme de l'objet) est plus robuste.
Afin de réécrire le contenu, la langue du texte original doit être réécrite en chinois et la phrase originale n'a pas besoin d'apparaître
Cette étude valide le cadre GenSim par des expériences, abordant les questions spécifiques suivantes : (1) Quelle est l'efficacité du LLM dans la conception et la mise en œuvre de tâches de simulation ? GenSim peut-il améliorer les performances du LLM dans la génération de tâches ? (2) La formation sur les tâches générées par LLM peut-elle améliorer la capacité de généralisation des politiques ? La formation politique bénéficierait-elle davantage si elle lui confiait davantage de tâches de génération ? (3) La pré-formation sur les tâches de simulation générées par LLM est-elle bénéfique pour le déploiement de politiques robotiques dans le monde réel ?
Évaluer la capacité de généralisation des tâches de simulation de robot LLM
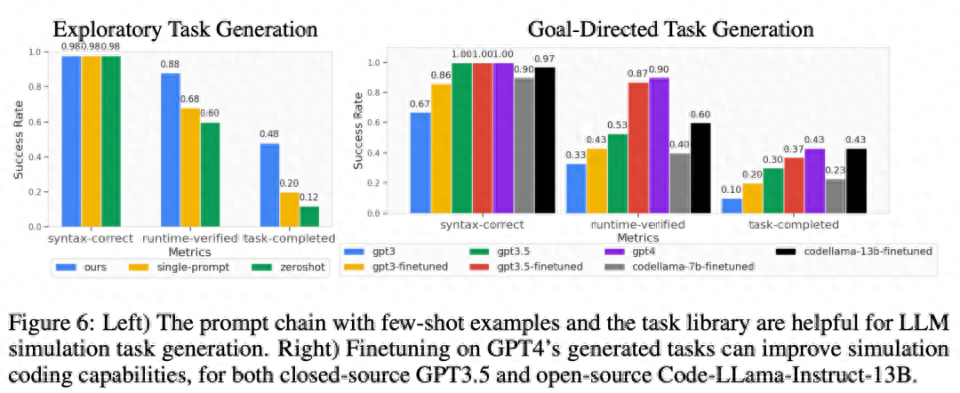
Comme le montre la figure 6 ci-dessous, pour la génération de tâches en mode exploration et en mode orienté objectif, la chaîne d'invites en deux étapes composée de quelques échantillons et d'une bibliothèque de tâches peut améliorer efficacement le taux de réussite de la génération de code.
Généralisation au niveau des tâches
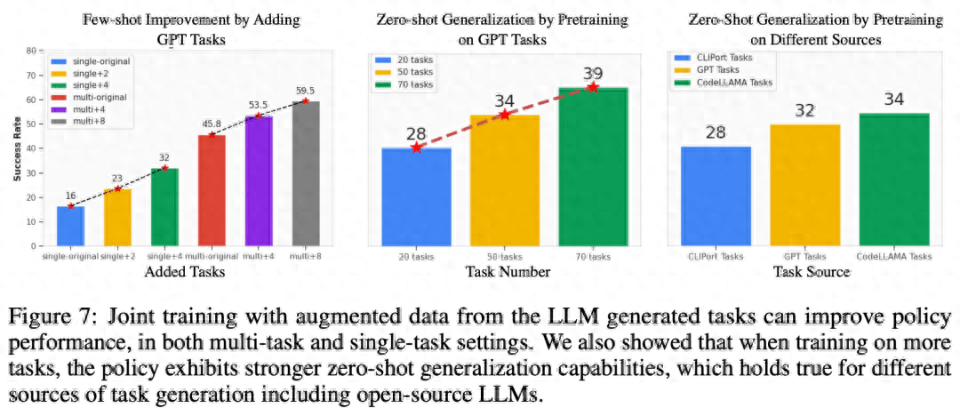
Optimisation de la stratégie en quelques étapes pour les tâches associées. Comme on peut l'observer sur le côté gauche de la figure 7 ci-dessous, la formation conjointe des tâches générées par LLM peut améliorer les performances de la politique sur la tâche CLIPort d'origine de plus de 50 %, en particulier dans les situations de faibles données (telles que 5 démos).
Généralisation de la politique Zero-shot aux tâches invisibles. Comme le montre la figure 7, en pré-entraînant sur davantage de tâches générées par LLM, notre modèle peut mieux se généraliser aux tâches du benchmark Ravens d'origine. Au milieu à droite de la figure 7, les chercheurs se sont également pré-entraînés sur 5 tâches sur différentes sources de tâches, y compris des tâches écrites manuellement, des LLM à source fermée et des LLM affinés à source ouverte, et ont observé un niveau de tâche zéro similaire. généralisation.
Adapter les modèles pré-entraînés au monde réel
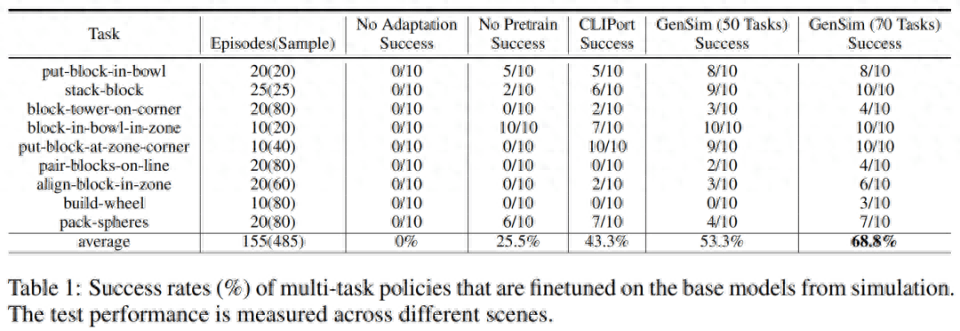
Les chercheurs ont transféré les stratégies formées dans l'environnement de simulation à l'environnement réel. Les résultats sont présentés dans le tableau 1 ci-dessous. Le modèle pré-entraîné sur 70 tâches générées par GPT-4 a mené 10 expériences sur 9 tâches et a atteint un taux de réussite moyen de 68,8 %, ce qui est meilleur que la pré-entraînement sur la tâche CLIPort uniquement. Par rapport au modèle de base, il s'est amélioré de plus de 25 %, et par rapport au modèle pré-entraîné sur seulement 50 tâches, il s'est amélioré de 15 %.
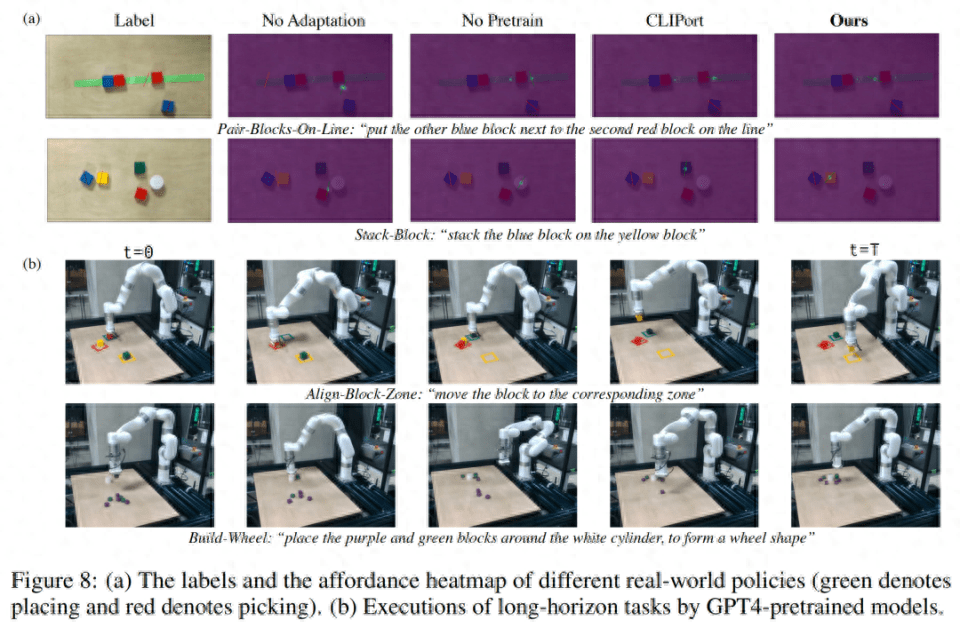
Les chercheurs ont également observé que la pré-formation sur différentes tâches de simulation améliorait la robustesse des tâches complexes à long terme. Par exemple, les modèles pré-entraînés GPT-4 affichent des performances plus robustes sur les tâches de construction réelles.
Expérience d'ablation
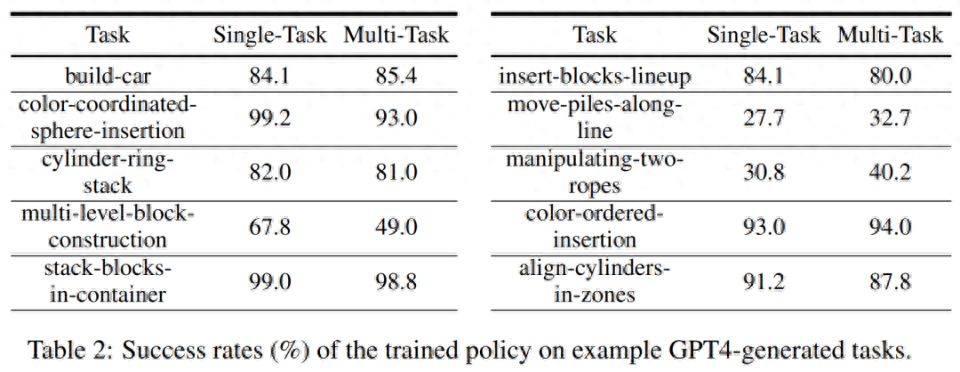
Taux de réussite des formations par simulation. Dans le tableau 2 ci-dessous, les chercheurs démontrent les taux de réussite de la formation politique à tâche unique et multitâche sur un sous-ensemble de tâches générées avec 200 démos. Pour la formation aux politiques sur les tâches de génération GPT-4, son taux de réussite moyen des tâches est de 75,8 % pour les tâches uniques et de 74,1 % pour les tâches multiples.
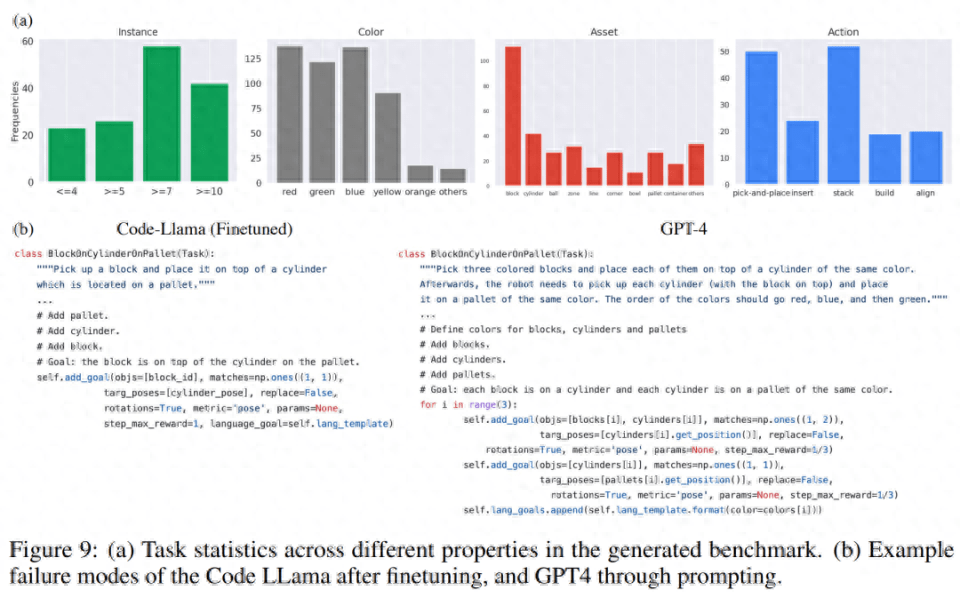
Générez des statistiques de tâches. Dans la figure 9 (a) ci-dessous, le chercheur montre les statistiques de tâches de différentes caractéristiques des 120 tâches générées par LLM. Il existe un équilibre intéressant entre les couleurs, les actifs, les actions et le nombre d'instances générées par le modèle LLM. Par exemple, le code généré contient de nombreuses scènes avec plus de 7 instances d'objet, ainsi que de nombreuses actions primitives de sélection et de placement et des actifs tels que des blocs.
Dans la comparaison de la génération de code, les chercheurs ont évalué qualitativement les cas d'échec dans les expériences descendantes de GPT-4 et Code Llama dans la figure 9(b) ci-dessous
Veuillez vous référer au document original pour plus de détails techniques.
Ce qui précède est le contenu détaillé de. pour plus d'informations, suivez d'autres articles connexes sur le site Web de PHP en chinois!
Articles Liés
Voir plus- Utiliser Python pour mettre en œuvre la réponse automatique des petits robots et le développement évolutif de petits robots pour les comptes publics WeChat
- Apprenez à implémenter un robot de service en utilisant Golang et Lua
- Dans quels aspects un robot est-il une application des ordinateurs ?
- Vivo a-t-il un robot vocal intelligent ?
- Le langage, le démantèlement de robots, le MIT et d'autres utilisent GPT-4 pour générer automatiquement des tâches de simulation et les migrer vers le monde réel