
Maison >Périphériques technologiques >IA >SupFusion : Vous cherchez comment superviser efficacement les réseaux de détection 3D fusionnés Lidar-Caméra ?
SupFusion : Vous cherchez comment superviser efficacement les réseaux de détection 3D fusionnés Lidar-Caméra ?

- 王林avant
- 2023-09-28 21:41:071422parcourir
La détection 3D basée sur la fusion de caméras lidar est une tâche clé pour la conduite autonome. Ces dernières années, de nombreuses méthodes de fusion de caméras LiDAR ont émergé et ont atteint de bonnes performances, mais ces méthodes manquent toujours d'un processus de fusion bien conçu et efficacement supervisé.
Cet article présente une nouvelle stratégie de formation appelée SupFusion, qui fournit une fusion laser radar-caméra supervision auxiliaire au niveau des fonctionnalités et améliore considérablement les performances de détection. Le procédé comprend la méthode d'augmentation des données Polar Sampling pour chiffrer des cibles clairsemées et former des modèles auxiliaires afin de générer des fonctionnalités de haute qualité pour la supervision. Ces fonctionnalités sont utilisées pour entraîner le modèle de fusion de caméra lidar et optimiser les fonctionnalités fusionnées afin de simuler la génération de fonctionnalités de haute qualité. En outre, un module de fusion profonde simple mais efficace est proposé, qui atteint en permanence des performances supérieures par rapport aux méthodes de fusion précédentes utilisant la stratégie SupFusion. La méthode présentée dans cet article présente les avantages suivants : Premièrement, SupFusion introduit une supervision auxiliaire au niveau des fonctionnalités, qui peut améliorer les performances de détection des caméras lidar sans augmenter les coûts d'inférence supplémentaires. Deuxièmement, la fusion profonde proposée peut améliorer continuellement les capacités du détecteur. Les modules SupFusion et de fusion profonde proposés sont plug-and-play, et cet article démontre leur efficacité grâce à des expériences approfondies. Dans le benchmark KITTI pour la détection 3D basée sur plusieurs caméras lidar, une amélioration d'environ 2 % de la mAP 3D a été obtenue !
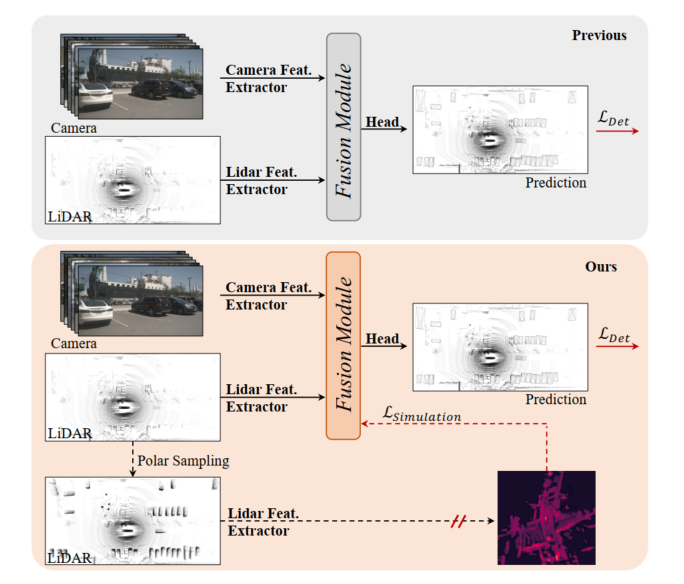
Figure 1 : En haut, précédent modèle de détection 3D de la caméra lidar, le module de fusion est optimisé par perte de détection. En bas : SupFusion proposé dans cet article introduit la supervision auxiliaire grâce à des fonctionnalités de haute qualité fournies par les modèles auxiliaires.
La détection 3D basée sur la fusion de caméras lidar est une tâche critique et difficile en conduite autonome et en robotique. Les méthodes précédentes projetaient toujours l'entrée de la caméra dans l'espace lidar BEV ou voxel via des paramètres intrinsèques et extrinsèques, pour aligner les fonctionnalités du lidar et de la caméra. Ensuite, une simple concaténation ou sommation est utilisée pour obtenir les caractéristiques fusionnées pour la détection finale. De plus, certaines méthodes de fusion basées sur l’apprentissage profond ont atteint des performances prometteuses. Cependant, les méthodes de fusion précédentes optimisent toujours directement les modules d’extraction et de fusion de fonctionnalités 3D/2D via une perte de détection, qui manque de conception soignée et de supervision efficace au niveau des fonctionnalités, limitant leurs performances.
Ces dernières années, les méthodes de distillation ont montré de grandes améliorations en termes de supervision au niveau des fonctionnalités pour la détection 3D. Certaines méthodes fournissent des fonctionnalités lidar pour guider le squelette 2D afin d'estimer les informations de profondeur en fonction des entrées de la caméra. De plus, certaines méthodes offrent des capacités de fusion de caméras lidar pour superviser l’épine dorsale lidar afin d’apprendre des représentations globales et contextuelles à partir des entrées lidar. En introduisant une supervision auxiliaire au niveau des fonctionnalités en simulant des fonctionnalités plus robustes et de haute qualité, le détecteur peut promouvoir des améliorations marginales. Inspiré par cela, une solution naturelle pour gérer la fusion des fonctionnalités des caméras lidar consiste à fournir des fonctionnalités plus puissantes et de haute qualité et à introduire une supervision auxiliaire pour la détection 3D des caméras lidar !
Afin d'améliorer les performances de la détection 3D fusionnée basée sur les caméras lidar, cet article propose une méthode de fusion de caméras lidar supervisée appelée SupFusion. Cette méthode y parvient en générant des fonctionnalités de haute qualité et en fournissant une supervision efficace des processus de fusion et d'extraction de fonctionnalités. Tout d’abord, nous formons un modèle auxiliaire pour fournir des fonctionnalités de haute qualité. Contrairement aux méthodes précédentes qui exploitent des modèles plus grands ou des données supplémentaires, nous proposons une nouvelle méthode d'augmentation des données appelée Polar Sampling. L'échantillonnage polaire améliore dynamiquement la densité des cibles à partir de données lidar clairsemées, ce qui les rend plus faciles à détecter et améliore la qualité des caractéristiques, comme des résultats de détection précis. Nous formons ensuite simplement un détecteur basé sur la fusion de caméras lidar et introduisons une supervision auxiliaire au niveau des fonctionnalités. Au cours de cette étape, nous introduisons les entrées brutes du lidar et de la caméra dans le module de base et de fusion 3D/2D pour obtenir des fonctionnalités fusionnées. Les fonctionnalités fusionnées sont introduites dans la tête de détection pour la prédiction finale, tandis que la supervision auxiliaire modélise les fonctionnalités fusionnées en fonctionnalités de haute qualité. Ces fonctionnalités sont obtenues grâce à des modèles auxiliaires pré-entraînés et à des données lidar améliorées. De cette manière, la supervision proposée au niveau des fonctionnalités peut permettre au module de fusion de générer des fonctionnalités plus robustes et d’améliorer encore les performances de détection. Pour mieux fusionner les fonctionnalités du lidar et de la caméra, nous proposons un module de fusion profonde simple et efficace, composé de blocs MLP empilés et de blocs de fusion dynamique. SupFusion peut exploiter pleinement les capacités du module de fusion profonde et améliorer continuellement la précision de la détection !
Principales contributions de cet article :
- Propose une nouvelle stratégie de formation à la fusion supervisée SupFusion, qui consiste principalement en un processus de génération de fonctionnalités de haute qualité, et propose pour la première fois une perte supervisée auxiliaire au niveau des fonctionnalités pour une extraction robuste des fonctionnalités de fusion et une détection 3D précise.
- Afin d'obtenir des fonctionnalités de haute qualité dans SupFusion, une méthode d'augmentation des données appelée "Polar Sampling" est proposée pour crypter des cibles clairsemées. De plus, un module de fusion profonde efficace est proposé pour améliorer continuellement la précision de la détection.
- Réalisation d'expériences approfondies basées sur plusieurs détecteurs avec différentes stratégies de fusion et obtenu une amélioration mAP d'environ 2 % par rapport au benchmark KITTI.
La méthode proposée
Le processus de génération de caractéristiques de haute qualité est illustré dans la figure ci-dessous pour tout échantillon LiDAR donné, la cible clairsemée est cryptée par collage polaire, et le collage polaire calcule l'orientation et la rotation à extraire. à partir de la base de données. Recherchez des cibles denses et ajoutez des points supplémentaires pour les cibles clairsemées en les collant. Cet article entraîne d'abord le modèle auxiliaire avec des données améliorées et introduit les données lidar améliorées dans le modèle auxiliaire pour générer des caractéristiques f* de haute qualité après sa convergence.
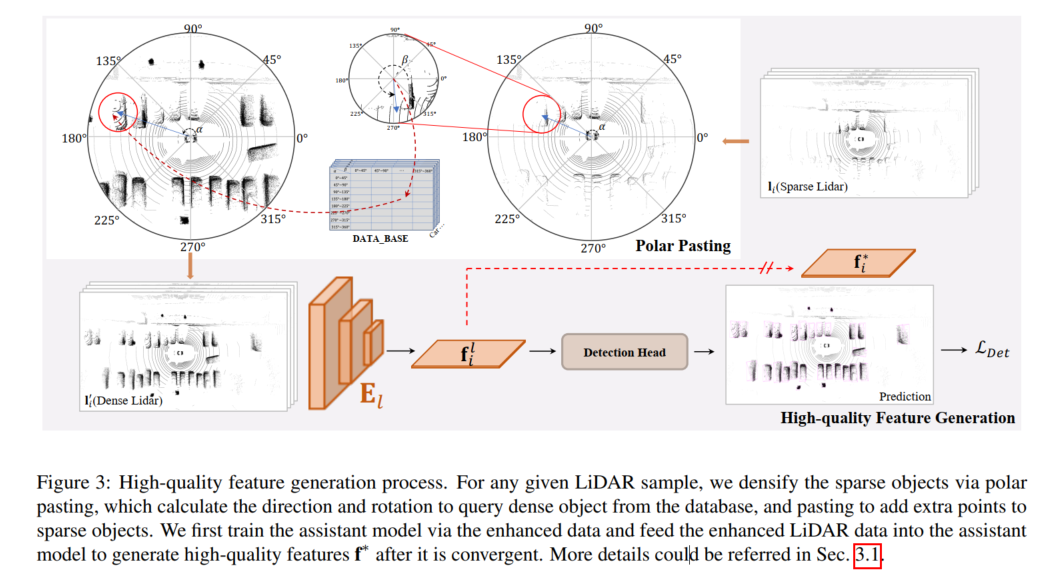
Génération de fonctionnalités de haute qualité
Pour fournir une supervision au niveau des fonctionnalités dans SupFusion, un modèle auxiliaire est adopté pour capturer des fonctionnalités de haute qualité à partir des données augmentées, comme le montre la figure 3. Tout d’abord, un modèle auxiliaire est formé pour fournir des fonctionnalités de haute qualité. Pour tout échantillon dans D, les données lidar clairsemées sont augmentées pour obtenir des données améliorées par collage polaire, qui crypte la cible alternative en ajoutant l'ensemble de points générés dans le groupement polaire. Ensuite, après la convergence du modèle auxiliaire, les échantillons améliorés sont entrés dans le modèle auxiliaire optimisé pour capturer des caractéristiques de haute qualité pour entraîner le modèle de détection 3D de la caméra lidar. Afin de mieux s'appliquer à un détecteur de caméra lidar donné et de faciliter sa mise en œuvre, nous adoptons ici simplement le détecteur de branche lidar comme modèle auxiliaire !
Formation des détecteurs
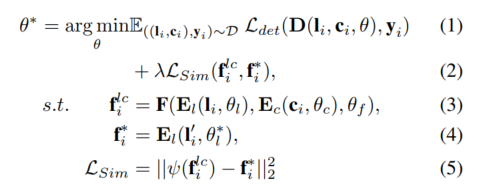
Pour tout détecteur de caméra lidar donné, le modèle est formé à l'aide de la supervision auxiliaire proposée au niveau des fonctionnalités. Étant donné un échantillon , , le lidar et la caméra sont d'abord entrés dans les encodeurs 3D et 2D et pour capturer les caractéristiques correspondantes et ces caractéristiques sont entrées dans le modèle de fusion pour générer les caractéristiques fusionnées et passer à la détection. Faire la prédiction finale dans ta tête. De plus, la supervision auxiliaire proposée est utilisée pour simuler des fonctionnalités fusionnées avec des fonctionnalités de haute qualité générées à partir du modèle auxiliaire pré-entraîné et des données lidar améliorées. Le processus ci-dessus peut être formulé comme :
Polar Sampling
Afin de fournir des fonctionnalités de haute qualité, cet article introduit une nouvelle méthode d'amélioration des données appelée Polar Sampling dans le SupFusion proposé pour résoudre le problème clairsemé. Ce problème provoque fréquemment des échecs de détection. À cette fin, nous effectuons un traitement dense des cibles clairsemées dans les données lidar, de la même manière que les cibles denses sont traitées. L'échantillonnage de coordonnées polaires se compose de deux parties : le regroupement de coordonnées polaires et le collage de coordonnées polaires. Dans le regroupement de coordonnées polaires, nous construisons principalement une base de données pour stocker les cibles denses, qui est utilisée pour le collage des coordonnées polaires, afin que les cibles clairsemées deviennent plus denses
Compte tenu des caractéristiques du capteur lidar, les données de nuage de points collectées sont naturellement Il existe un répartition de la densité. Par exemple, un objet a plus de points sur sa surface faisant face au capteur lidar et moins de points sur les côtés opposés. La distribution de la densité est principalement affectée par l'orientation et la rotation, tandis que la densité des points dépend principalement de la distance. Les objets plus proches du capteur lidar ont une densité de points plus dense. Inspiré par cela, l'objectif de cet article est de densifier les cibles clairsemées à longue distance et les cibles denses à courte distance en fonction de la direction et de la rotation des cibles clairsemées afin de maintenir la distribution de densité. Nous établissons un système de coordonnées polaires pour l'ensemble de la scène et la cible en fonction du centre de la scène et de la cible spécifique, et définissons la direction positive du capteur lidar comme 0 degré pour mesurer la direction et la rotation correspondantes. Nous collectons ensuite des cibles avec des distributions de densité similaires (par exemple avec une orientation et une rotation similaires) et générons une cible dense pour chaque groupe en groupements polaires et l'utilisons dans une pâte polaire pour denser des cibles clairsemées
Groupement polaire
Comme le montre la figure 4. , une base de données B est construite ici pour stocker l'ensemble de points d'objets denses généré l en fonction de la direction et de la rotation dans le groupement polaire, qui sont enregistrées comme α et β sur la figure 4 !
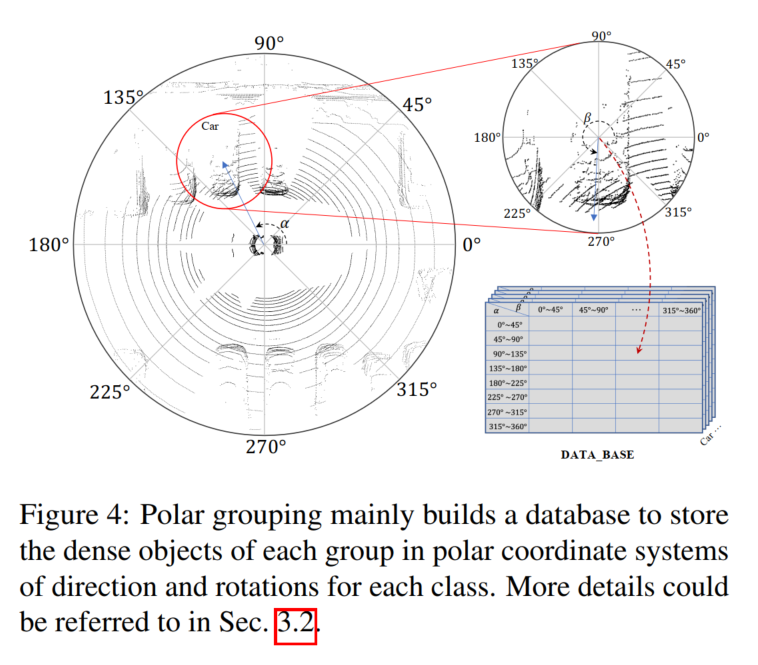
Tout d'abord, recherchez l'intégralité de l'ensemble de données, calculez l'angle polaire de toutes les cibles par position et fournissez une rotation dans le benchmark. Deuxièmement, divisez les cibles en groupes en fonction de leurs angles polaires. Divisez manuellement l'orientation et la rotation en N groupes, et pour tout point cible défini l, vous pouvez le mettre dans le groupe correspondant en fonction de l'index :

Polar Pasting
Comme le montre la figure 2, le collage polaire est utilisé pour améliorer les données lidar clairsemées afin de former des modèles auxiliaires et de générer des fonctionnalités de haute qualité. Étant donné qu'un échantillon LiDAR ,,,, contient des cibles, pour toute cible, la même orientation et la même rotation que le processus de regroupement peuvent être calculées et les cibles denses sont interrogées à partir de B en fonction de l'étiquette et de l'index, qui peuvent être obtenus à partir de l'équation. 6 pour des échantillons améliorés Toutes les cibles et obtenez des statistiques améliorées.
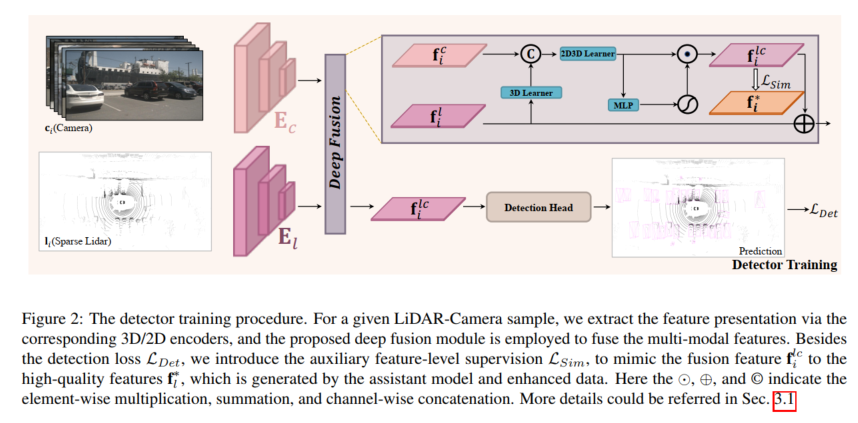
Deep Fusion
Pour simuler les caractéristiques de haute qualité générées par les données lidar améliorées, le modèle de fusion est conçu pour extraire les informations manquantes des cibles clairsemées des riches couleurs et des caractéristiques contextuelles de l'entrée de la caméra. À cette fin, cet article propose un module de fusion profonde pour utiliser les caractéristiques de l'image et des démonstrations lidar complètes. La fusion profonde proposée consiste principalement en un apprenant 3D et un apprenant 2D-3D. L'apprenant 3D est une simple couche convolutive utilisée pour transférer des rendus 3D dans un espace 2D. Ensuite, pour connecter les fonctionnalités 2D et les rendus 3D (par exemple, dans un espace 2D), un apprenant 2D-3D est utilisé pour fusionner les fonctionnalités de la caméra LiDAR. Enfin, les fonctionnalités fusionnées sont pondérées par les fonctions MLP et d'activation, qui sont rajoutées aux fonctionnalités lidar d'origine en tant que sortie du module de fusion profonde. L'apprenant 2D-3D se compose de blocs MLP empilés de profondeur K et apprend à exploiter les fonctionnalités de la caméra pour compléter les représentations lidar de cibles clairsemées afin de simuler des caractéristiques de haute qualité de cibles lidar denses.
Analyse comparative expérimentale
Résultats expérimentaux (mAP@R40%). Voici trois catégories de cas faciles, moyens (mod.) et difficiles, ainsi que les performances globales. Ici, L, LC, LC* représentent le détecteur lidar correspondant, le détecteur de fusion de caméra lidar et les résultats de la proposition de cet article. Δ représente l’amélioration. Les meilleurs résultats sont affichés en gras, où L devrait être le modèle auxiliaire et testé sur l'ensemble de validation augmenté. MVXNet est réimplémenté sur la base de mmdetection3d. PV-RCNN-LC et Voxel RCNN LC sont réimplémentés sur la base du code open source de VFF.
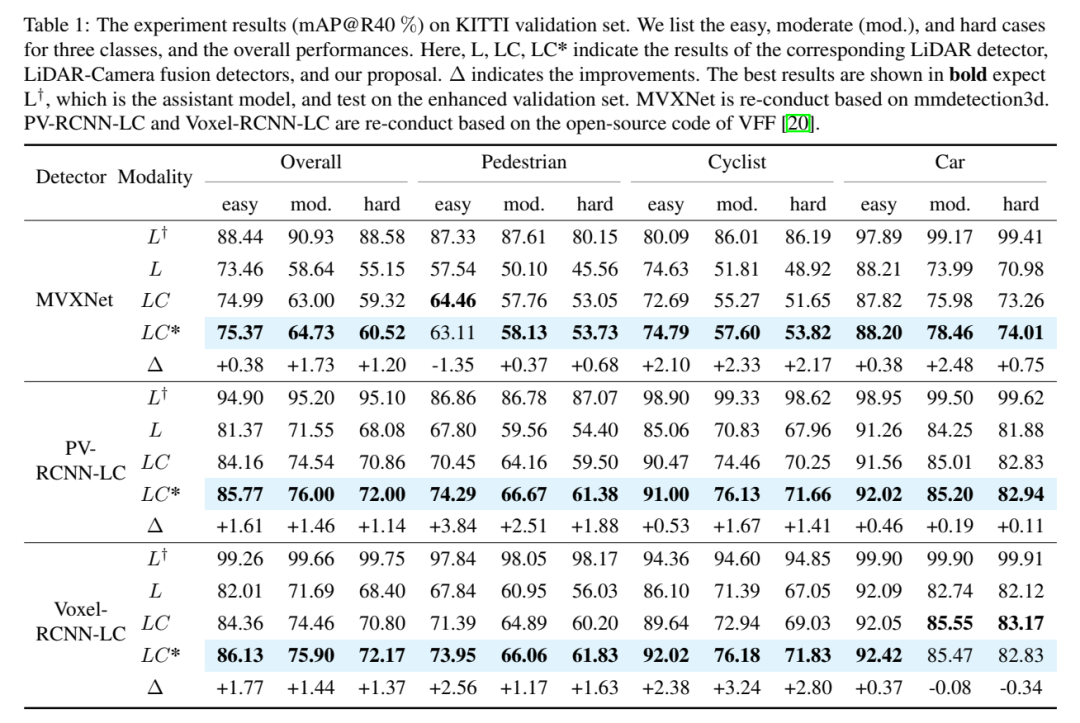
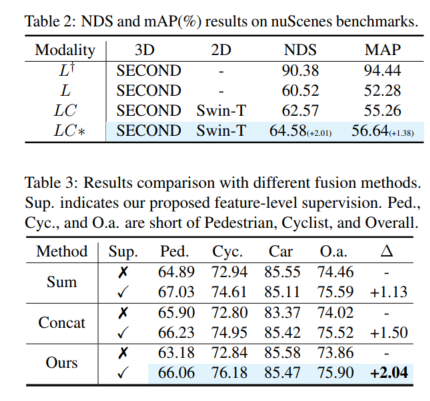
Contenu réécrit : Performance globale. Selon les résultats de la comparaison dans le tableau 1, la comparaison du 3DmAP@R40 basée sur trois détecteurs montre les performances globales de chaque catégorie et de chaque division de difficulté. On peut clairement observer qu'en introduisant une entrée de caméra supplémentaire, la méthode de caméra lidar (LC) surpasse le détecteur basé sur lidar (L) en termes de performances. En introduisant l'échantillonnage polaire, le modèle auxiliaire (L†) montre des performances admirables sur l'ensemble de validation augmenté (par exemple, plus de 90 % de mAP). Avec une supervision auxiliaire dotée de fonctionnalités de haute qualité et le module de fusion profonde proposé, notre proposition améliore continuellement la précision de la détection. Par exemple, par rapport au modèle de base (LC), notre proposition permet d'obtenir des améliorations mAP 3D de +1,54 % et +1,24 % sur les cibles moyennes et dures, respectivement. De plus, nous avons également mené des expériences sur le benchmark nuScenes basé sur SECOND-LC. Comme le montre le tableau 2, NDS et mAP ont été améliorés de +2,01 % et +1,38 % respectivement
analyse d'amélioration de la perception de classe. Par rapport au modèle de base, SupFusion et la fusion profonde améliorent non seulement les performances globales, mais également les performances de détection de chaque catégorie, y compris les piétons. En comparant l'amélioration moyenne dans trois catégories (par exemple, cas moyen), les observations suivantes peuvent être faites : Les cyclistes ont vu. la plus forte amélioration (+2,41%), tandis que les piétons et les voitures ont connu des améliorations de +1,35% et +0,86% respectivement. Les raisons sont évidentes : (1) Les voitures sont plus faciles à repérer et obtiennent de meilleurs résultats que les piétons et les cyclistes, et donc plus difficiles à améliorer. (2) Les cyclistes obtiennent plus d'améliorations que les piétons car les piétons ne sont pas en grille et génèrent des cibles moins denses que les cyclistes et obtiennent donc des améliorations de performances moindres !

Veuillez cliquer sur le lien suivant pour voir le contenu original : https://mp.weixin.qq.com/s/vWew2p9TrnzK256y-A4UFw
Ce qui précède est le contenu détaillé de. pour plus d'informations, suivez d'autres articles connexes sur le site Web de PHP en chinois!
Articles Liés
Voir plus- Entraînez-vous une seule fois pour générer de nouvelles scènes 3D ! L'histoire de l'évolution du « Light Field Neural Rendering » de Google
- Combien de temps faudra-t-il pour parvenir à la conduite autonome ?
- La conduite autonome est difficile à attaquer par la réduction de dimensionnalité
- Comment développer la conduite autonome et l'Internet des véhicules en PHP ?
- Conduite autonome et technologie de réseau intelligent en Java