
Maison >Périphériques technologiques >IA >Un artefact de spéléologie ? Drone autorotatif monorotor avec navigation autonome, plus efficace !
Un artefact de spéléologie ? Drone autorotatif monorotor avec navigation autonome, plus efficace !

- WBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBavant
- 2023-06-15 11:41:291211parcourir
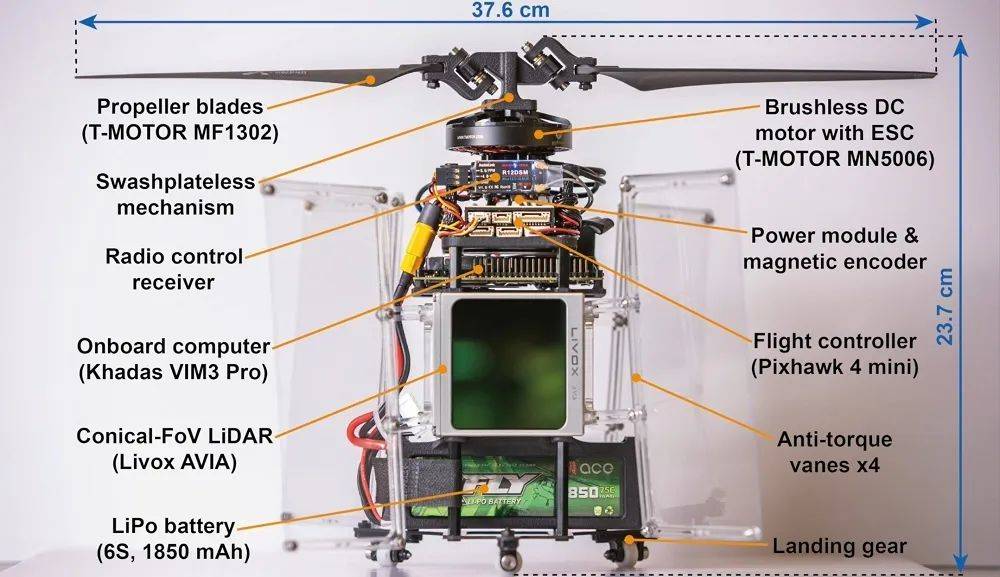
Schéma structurel de PULSAR
[Global Network Drone Comprehensive Report] Nouvelles de l'Université de Hong Kong, récemment, une équipe dirigée par le Dr Zhang Fu, professeur adjoint du Département de génie mécanique, École d'ingénierie de l'Université de Hong Kong (HKU), a a récemment conçu un drone qui utilise l'énergie pour voler sans transmettre de transmission radar. Un drone de détection appelé PULSAR. Les « pulsars » ont de multiples fonctions telles que la détection et la cartographie, tout comme la scène du film de science-fiction « Prométhée » où les humains utilisent des détecteurs de spin pour construire une carte tridimensionnelle d'une grotte en temps réel, devenant ainsi une réalité.
On rapporte que l'importance des drones augmente progressivement dans de nombreux domaines tels que la recherche et le sauvetage, l'exploration de grottes et la cartographie architecturale. L'équipe du Dr Zhang se concentre sur le mouvement de rotation. Les « pulsars » utilisent un vol propulsé et n'ont pas besoin de piloter la détection radar. En raison de leur mouvement de rotation et du mode de balayage des faisceaux lidar, ils sont intuitivement similaires aux pulsars en astronomie. similaire. "Pulsar" est équipé d'un micro-ordinateur de bord et d'un lidar, permettant une perception, une cartographie, une planification et un contrôle totalement autonomes, sans avoir besoin d'aide d'équipement externe dans des environnements intérieurs ou extérieurs. Un seul actionneur est utilisé sur le pulsar pour entraîner un mécanisme sans plateau cyclique capable de produire simultanément une poussée et un couple.
L'équipe du Dr Zhang a utilisé « Pulsar » pour mener des expériences d'exploration environnementale et d'évitement dynamique d'obstacles multidirectionnels. Les résultats ont montré qu'il peut effectuer une navigation autonome et une détection en temps réel dans des environnements inconnus sans recourir à l'aide d'un quelconque équipement externe. Obstacles statiques et dynamiques dans l'environnement.
« Pulsar » a la capacité d'effectuer une navigation entièrement automatique la nuit, indiquant que ses performances de navigation ne sont pas limitées par les conditions d'éclairage. De plus, il peut gérer les perturbations extérieures dues au vent. Même s'il est perturbé par une vitesse de vent maximale de 4,5 mètres par seconde, le "Pulsar" peut toujours maintenir une position stationnaire dans une petite plage. Ces caractéristiques rendent l'avion plus sûr et plus stable dans un environnement sauvage.
Le capteur peut également augmenter le champ de vision grâce à un mouvement de rotation intrinsèque, améliorant ainsi les capacités de perception et l'efficacité de la mission du drone, en plus des capacités ci-dessus. Il existe actuellement deux méthodes principales utilisées pour élargir le champ de vision du capteur, et leur caractéristique commune est une consommation d’énergie globale élevée. Une approche possible consiste à utiliser des capteurs avec un large champ de vision, tels que des objectifs fisheye, des caméras réfléchissantes ou un lidar à 360 degrés. Cependant, les caméras fisheye et les caméras auto-réfléchissantes souffrent souvent d'une déformation importante, et le champ de vision du lidar à 360 degrés dans la direction verticale est encore étroit et la résolution est faible. Une autre méthode consiste à utiliser plusieurs capteurs simultanément, comme un système multi-caméras ou un système multi-lidar. Cependant, les systèmes multi-capteurs entraîneront des coûts supplémentaires et un temps de traitement des données plus long. De même, l’utilisation d’un système de cardan pour élargir le champ de vision entraînera également des problèmes similaires.
L'équipe du Dr Zhang a découvert que « Pulsar » peut économiser 26,7 % de la consommation d'énergie tout en conservant une bonne flexibilité par rapport aux drones quadricoptères ayant la même surface de pale et la même charge. Le système d'alimentation du pulsar utilise un seul actionneur pour atteindre une efficacité de conversion d'énergie plus élevée, avec une efficacité globale allant jusqu'à 6,65 grammes par watt. Avec seulement un diamètre d'hélice de seulement 37,6 centimètres et une batterie de petite capacité d'une capacité de 41 wattheures, ce drone de 1 234 grammes a réalisé un temps de vol stationnaire de plus de 12 minutes. Si le lidar est remplacé par des hélices et des batteries plus grandes, le temps de vol stationnaire du « Pulsar » peut être prolongé à plus de 40 minutes.
Les résultats de la recherche ont été publiés dans Science Robotics. L'article est intitulé "Un drone auto-rotatif à actionnement unique avec un champ de vision étendu du capteur pour une navigation autonome" et a été publié sur la page d'accueil de l'image du site Web Science.
Le Dr Zhang a déclaré que la plateforme de recherche établie par son équipe est propice à des recherches plus approfondies sur les drones à rotation : « Nous pensons que la création de cette plateforme sera propice à l'exploration de la méthode de contrôle des drones en rotation à grande vitesse. positionnement et contrôle simultanés sous mouvement violent. » Technologie de cartographie (SLAM).
Ce qui précède est le contenu détaillé de. pour plus d'informations, suivez d'autres articles connexes sur le site Web de PHP en chinois!
Articles Liés
Voir plus- Tendances technologiques à surveiller en 2023
- Comment l'intelligence artificielle apporte un nouveau travail quotidien aux équipes des centres de données
- L'intelligence artificielle ou l'automatisation peuvent-elles résoudre le problème de la faible efficacité énergétique des bâtiments ?
- Co-fondateur d'OpenAI interviewé par Huang Renxun : les capacités de raisonnement de GPT-4 n'ont pas encore atteint les attentes
- Bing de Microsoft surpasse Google en termes de trafic de recherche grâce à la technologie OpenAI