
Maison >Périphériques technologiques >IA >Un article expliquant les principales difficultés techniques de la conduite autonome
Un article expliquant les principales difficultés techniques de la conduite autonome

- 王林avant
- 2023-05-15 11:19:051074parcourir
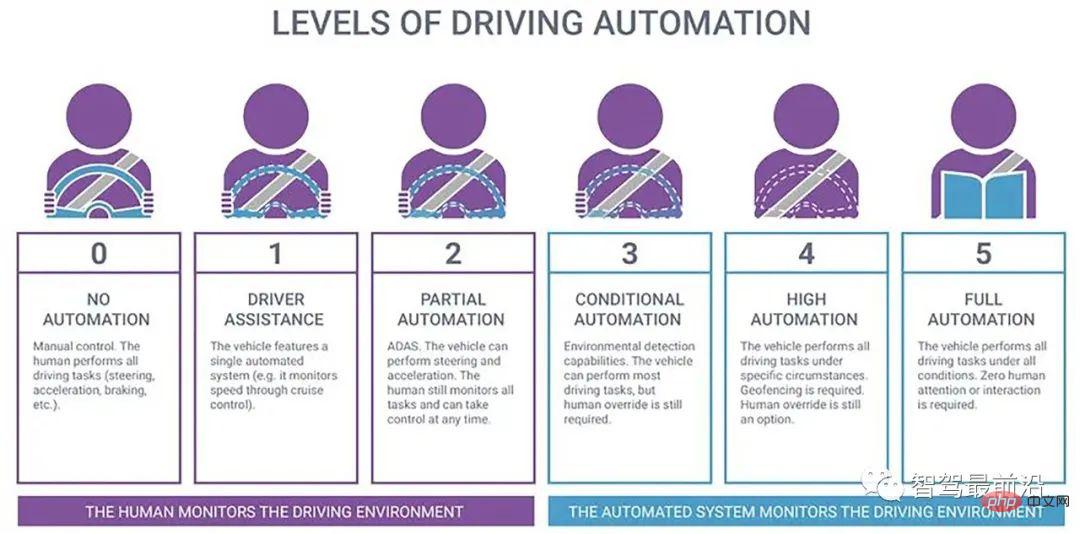
L'American Society of Automotive Engineers divise la conduite autonome en 6 niveaux, L0 à L5, en fonction du degré d'intelligence du véhicule :
-
L0 est No Automation (NA), c'est-à-dire une voiture traditionnelle, où le conducteur effectue toutes les opérations Tâches, telles que la direction, le freinage, l'accélération, la décélération ou le stationnement
-
L1 est un assistant de conduite (DA), qui peut fournir au conducteur un avertissement ou une assistance à la conduite, comme le volant ou l'accélération. en décélération est pris en charge, et le reste est actionné par le conducteur
-
L2 est une automatisation partielle (PA), le véhicule assure la conduite du volant et de multiples opérations en accélération et décélération, et le conducteur est responsable de autre opération de conduite ;
-
L3 est l'automatisation conditionnelle (CA), c'est-à-dire que le système de conduite automatique effectue la plupart des opérations de conduite et que le conducteur doit se concentrer en cas d'urgence
-
L4 ; Il s'agit d'une haute automatisation (HA), où toutes les opérations de conduite sont effectuées par le véhicule, et le conducteur n'a pas besoin de se concentrer, mais les conditions routières et environnementales sont limitées
- L5 est une automatisation complète (FA), où Dans toutes les conditions routières et environnementales, le système de conduite autonome effectue toutes les opérations de conduite et le conducteur n'a pas besoin de se concentrer.
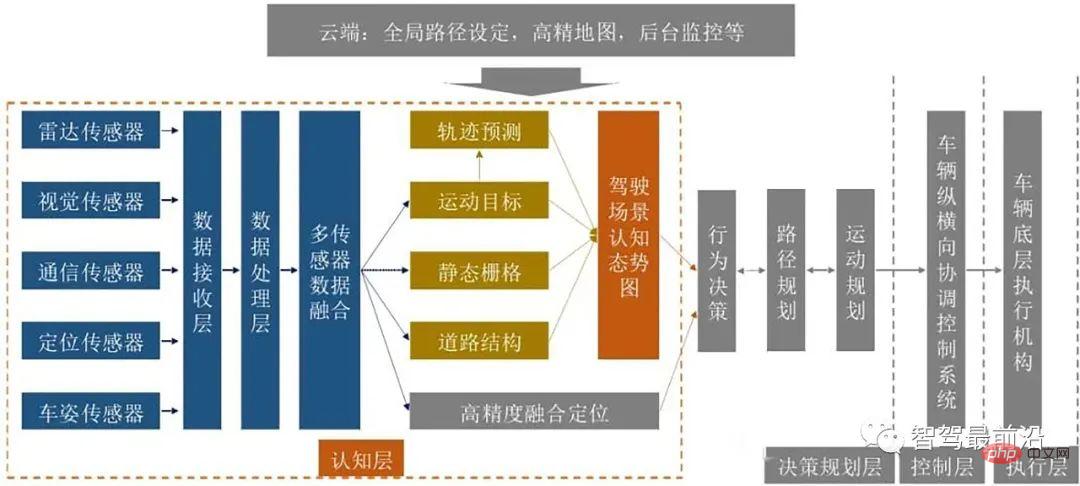
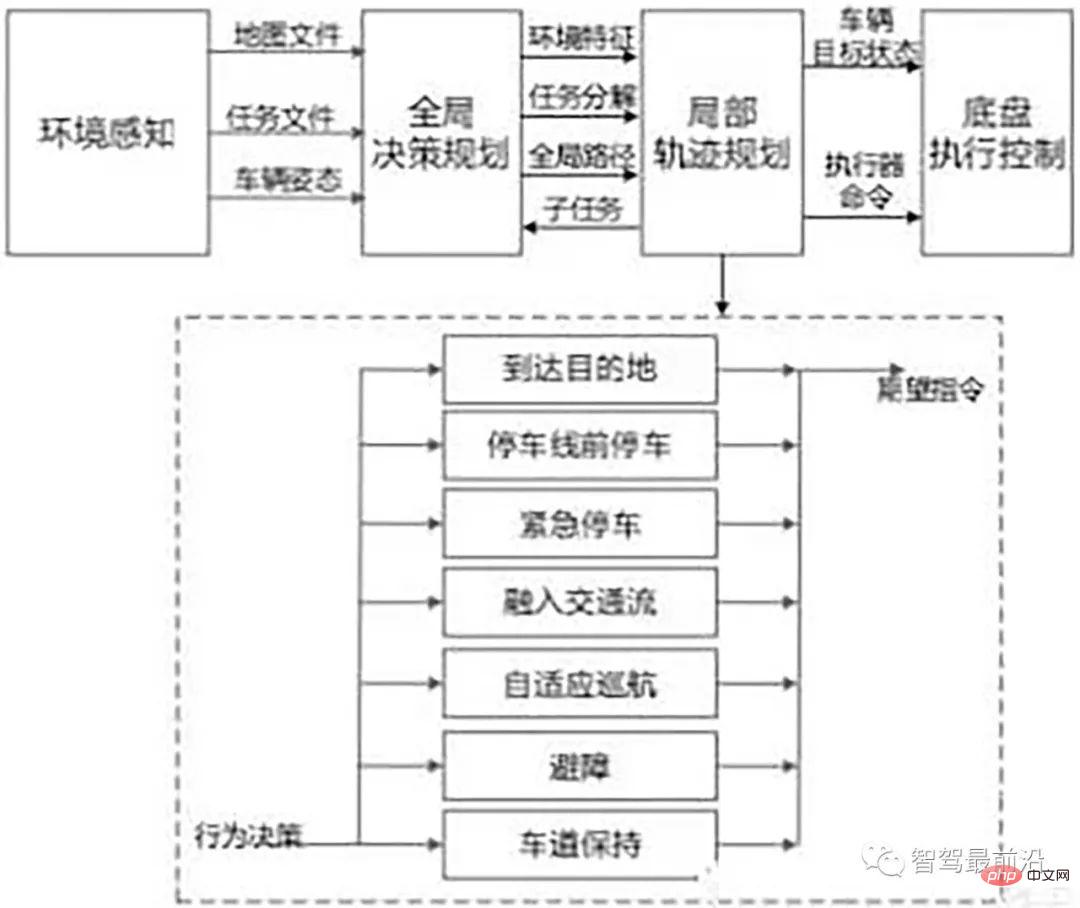
L'architecture logicielle et matérielle d'un véhicule autonome est présentée dans la figure 2, qui est principalement divisée en couche de sensibilisation à l'environnement, couche de prise de décision et de planification, couche de contrôle et couche d'exécution. La couche de reconnaissance (détection) de l'environnement obtient principalement les informations environnementales du véhicule et les informations sur l'état du véhicule via des capteurs tels que le lidar, le radar à ondes millimétriques, le radar à ultrasons, les caméras du véhicule, les systèmes de vision nocturne, le GPS et les gyroscopes. Plus précisément, elle comprend : la détection des lignes de voie. , reconnaissance des feux de circulation, reconnaissance des panneaux de signalisation, détection des piétons, détection des véhicules, reconnaissance des obstacles et positionnement des véhicules, etc. la couche de prise de décision et de planification est divisée en planification des tâches, planification du comportement et planification de la trajectoire, sur la base de la planification d'itinéraire définie et ; l'environnement et l'état du véhicule pour planifier les prochaines tâches de conduite spécifiques (maintien de voie, changement de voie, suivi, dépassement, évitement de collision, etc.), les comportements (accélération, décélération, virage, freinage, etc.) et les trajectoires (conduite). trajectoires) ; couche de contrôle et exécution. La couche contrôle la conduite, le freinage, la direction, etc. du véhicule en fonction du modèle du système dynamique du véhicule, afin que le véhicule suive la trajectoire de conduite prescrite.
La technologie de conduite autonome implique de nombreuses technologies clés. Cet article présente principalement la technologie de perception de l'environnement, la technologie de positionnement de haute précision, la technologie de prise de décision et de planification, ainsi que la technologie de contrôle et d'exécution.
01 Technologie de perception de l'environnement
La perception de l'environnement fait référence à la capacité de comprendre la scène de l'environnement, telle que les types d'obstacles, les panneaux et marquages routiers, la détection des véhicules en marche, la classification linguistique des informations routières et d'autres données. . Le positionnement est le post-traitement des résultats de perception, qui aide le véhicule à comprendre sa position par rapport à son environnement grâce à la fonction de positionnement. La perception de l'environnement nécessite d'obtenir une grande quantité d'informations sur l'environnement via des capteurs pour garantir une compréhension correcte de l'environnement du véhicule et prendre les décisions et planifications correspondantes sur cette base.
Les capteurs de perception de l'environnement couramment utilisés pour les véhicules autonomes comprennent : les caméras, le lidar, le radar à ondes millimétriques, le radar infrarouge et ultrasonique, etc. Les caméras sont les plus couramment utilisées, les plus simples et les plus proches du principe d’imagerie de l’œil humain des capteurs de perception de l’environnement pour les véhicules autonomes. En capturant l'environnement autour du véhicule en temps réel, la technologie CV est utilisée pour analyser les images capturées afin de réaliser des fonctions telles que la détection des véhicules et des piétons et la reconnaissance des panneaux de signalisation autour du véhicule.
Les principaux avantages de la caméra sont sa haute résolution et son faible coût. Cependant, par mauvais temps comme la nuit, la pluie, la neige, la brume, etc., les performances de la caméra diminueront rapidement. De plus, la distance de visualisation de la caméra est limitée et elle n'est pas adaptée à l'observation à longue distance.
Le radar à ondes millimétriques est également un capteur couramment utilisé pour les véhicules autonomes. Le radar à ondes millimétriques fait référence au radar qui fonctionne dans la bande d'ondes millimétriques (longueur d'onde 1-10 mm, domaine de fréquence 30-300 GHz). de vol). Les objets cibles sont détectés. Le radar à ondes millimétriques envoie en continu des signaux à ondes millimétriques au monde extérieur et reçoit le signal renvoyé par la cible. Il détermine la distance entre la cible et le véhicule en fonction de la différence de temps entre l'envoi et la réception du signal. Par conséquent, le radar à ondes millimétriques est principalement utilisé pour éviter les collisions entre les voitures et les objets environnants, comme la détection des angles morts, l'aide à l'évitement d'obstacles, l'aide au stationnement, la croisière adaptative, etc. Le radar à ondes millimétriques a une forte capacité anti-interférence, et sa capacité à pénétrer les précipitations, le sable, la poussière, la fumée et le plasma est beaucoup plus puissante que le laser et l'infrarouge, et il peut fonctionner par tous les temps. Cependant, il présente également des inconvénients tels qu'une atténuation importante du signal, une facilité de blocage par les bâtiments, les corps humains, etc., une courte distance de transmission, une faible résolution et des difficultés d'imagerie.
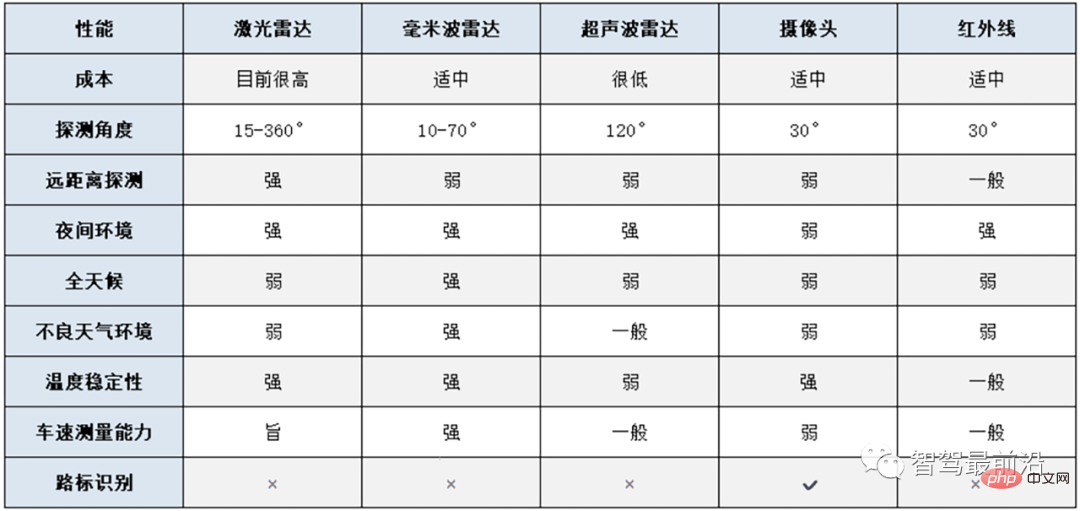
Lidar utilise également la technologie ToF pour déterminer l'emplacement et la distance de la cible. Le LiDAR détecte les cibles en émettant des faisceaux laser. Sa précision et sa sensibilité de détection sont plus élevées et sa plage de détection est plus large. Cependant, le LiDAR est plus sensible aux interférences de la pluie, de la neige, de la brume, etc. dans l'air, et son coût élevé limite également. son application. Le lidar monté sur véhicule peut être divisé en lidar à une ligne, 4 lignes, 8 lignes, 16 lignes et 64 lignes en fonction du nombre de faisceaux laser émis. Vous pouvez utiliser le tableau suivant (Tableau 1) pour comparer les avantages et les inconvénients des capteurs traditionnels.
La perception de l'environnement de conduite autonome adopte généralement deux voies techniques : « perception faible + super intelligence » et « perception forte + intelligence forte ». La technologie « perception faible + super intelligence » s'appuie principalement sur des caméras et une technologie d'apprentissage profond pour obtenir une perception environnementale, plutôt que sur le lidar. Cette technologie estime que les humains peuvent conduire avec une paire d'yeux et que la voiture peut également s'appuyer sur des caméras pour voir clairement l'environnement. Si la super intelligence est temporairement difficile à atteindre, afin de parvenir à une conduite sans conducteur, il est nécessaire d'améliorer les capacités de perception. Il s'agit de la voie technique dite « perception forte + intelligence forte ».
Par rapport à la voie technologique « perception faible + super intelligence », la plus grande caractéristique de la voie technologique « perception forte + intelligence forte » est l'ajout d'un capteur lidar, améliorant ainsi considérablement les capacités de perception. Tesla adopte la voie technique « intelligence faible + super intelligence », tandis que Google Waymo, Baidu Apollo, Uber, Ford Motor et d'autres sociétés d'intelligence artificielle, agences de voyage et constructeurs automobiles traditionnels adoptent toutes la voie technique « perception forte + intelligence forte ».
02 Technologie de positionnement de haute précision
Le but du positionnement est d'obtenir la position précise d'un véhicule autonome par rapport à l'environnement extérieur, ce qui constitue une base essentielle pour les véhicules autonomes. Lors de la conduite sur des routes urbaines complexes, la précision du positionnement nécessite une erreur ne dépassant pas 10 cm. Par exemple : ce n'est qu'en connaissant avec précision la distance entre le véhicule et l'intersection que nous pouvons faire des prévisions et des préparations plus précises. Ce n'est qu'en positionnant avec précision le véhicule que nous pouvons déterminer la voie dans laquelle se trouve le véhicule ; Si l'erreur de positionnement est élevée, cela peut provoquer un accident de la route complet.
Le GPS est actuellement la méthode de positionnement la plus utilisée. Plus la précision du GPS est élevée, plus le capteur GPS est cher. Cependant, la précision de positionnement actuelle de la technologie GPS commerciale est loin d'être suffisante. Sa précision n'est que d'un mètre et est facilement perturbée par des facteurs tels que l'obstruction du tunnel et le retard du signal. Afin de résoudre ce problème, Qualcomm a développé une technologie de positionnement de haute précision (VEPP) améliorée par la vision, qui intègre les informations de plusieurs composants automobiles tels que la navigation globale GNSS, les caméras, la navigation inertielle IMU et les capteurs de vitesse de roue et l'étalonnage mutuel. fusion pour obtenir un positionnement global en temps réel précis par rapport aux lignes de voie.
03 Technologie de décision et de planification
La planification décisionnelle est l'un des éléments clés de la conduite autonome. Elle fusionne d'abord les informations multicapteurs, puis prend des décisions de tâches en fonction des besoins de conduite, puis peut éviter les obstacles existants ci-dessous. , à travers certaines contraintes spécifiques, planifier plusieurs chemins sûrs qui peuvent être sélectionnés entre deux points, et sélectionner un chemin optimal parmi ces chemins comme trajectoire de conduite du véhicule, c'est-à-dire la planification. Selon différents niveaux de division, elle peut être divisée en deux types : la planification globale et la planification locale consiste à planifier un chemin optimal sans collision dans des conditions spécifiques sur la base des informations cartographiques obtenues. Par exemple, il existe de nombreuses routes entre Shanghai et Pékin. En planifier une comme itinéraire routier est la planification globale.
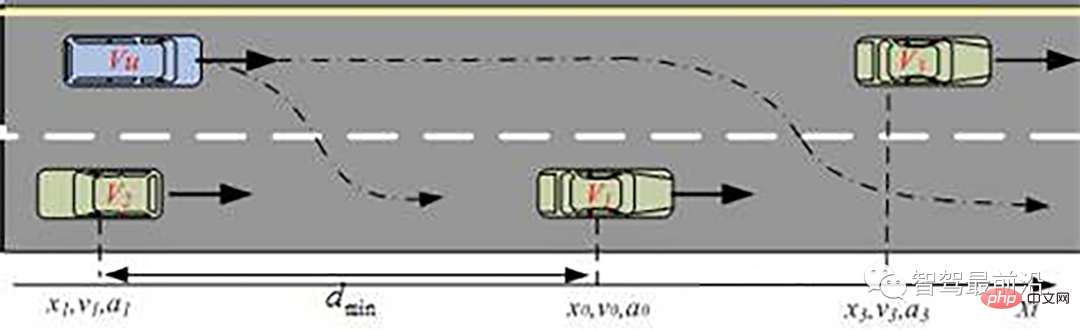
Algorithmes de planification de chemin statique tels que la méthode de la grille, la méthode du diagramme visuel, la méthode de la topologie, la méthode de l'espace libre, la méthode du réseau neuronal, etc. La planification locale est basée sur la planification globale et sur la base de certaines informations environnementales locales, c'est un processus qui peut éviter une collision avec des obstacles inconnus et finalement atteindre le point cible. Par exemple, il y aura d'autres véhicules ou obstacles sur l'itinéraire planifié globalement de Shanghai à Pékin. Si vous souhaitez éviter ces obstacles ou véhicules, vous devez tourner et ajuster la voie. Il s'agit d'une planification d'itinéraire locale. Les méthodes de planification de chemin local comprennent : la méthode du champ de potentiel artificiel, la méthode de l'histogramme de domaine vectoriel, la méthode du champ de force virtuel, l'algorithme génétique et d'autres algorithmes de planification de chemin dynamique.
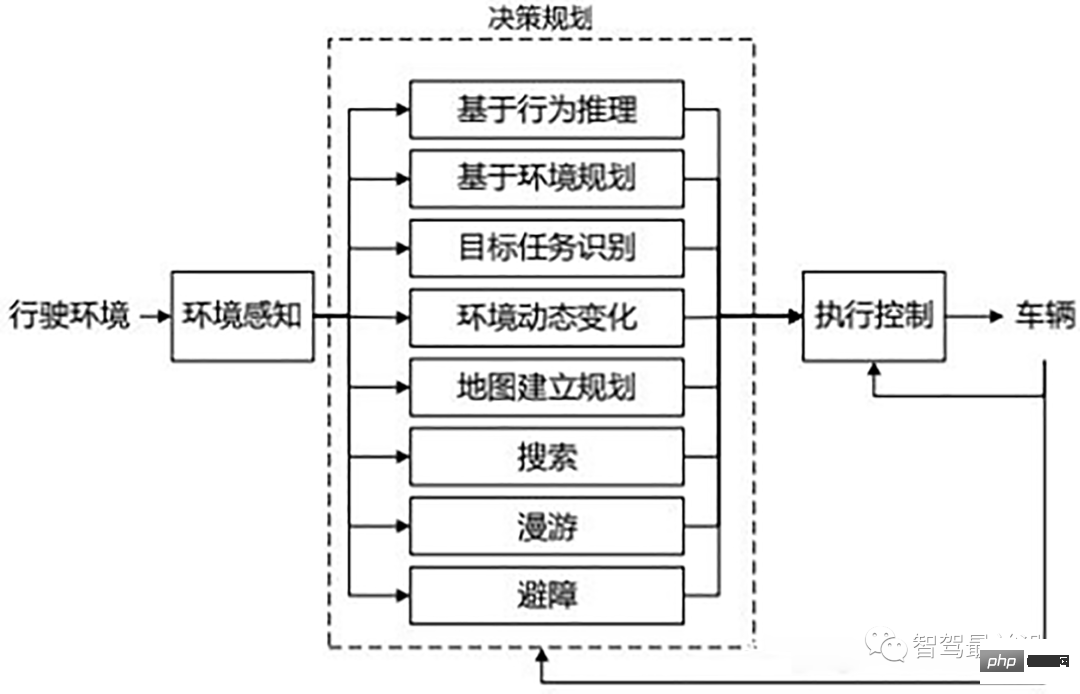
La couche de prise de décision et de planification est le système de conduite autonome. Elle est le reflet direct de l'intelligence et joue un rôle décisif dans la sécurité de conduite du véhicule et de l'ensemble du véhicule. Les architectures de planification décisionnelle communes incluent une hiérarchie progressive. et réactif et un hybride des deux.
L'architecture progressive hiérarchique est la structure d'un système en série. Dans ce système, les modules du système de conduite intelligent sont dans un ordre clair. La sortie du module précédent est donc l'entrée du module suivant. appelée structure d’action de planification perceptive. Cependant, la fiabilité de cette structure n'est pas élevée. Lorsqu'une panne logicielle ou matérielle se produit dans un certain module, l'ensemble du flux d'informations sera affecté et l'ensemble du système risque de s'effondrer, voire d'être paralysé.

L'architecture réactive adopte une structure parallèle. La couche de contrôle peut prendre des décisions directement en fonction de l'entrée du capteur. Par conséquent, les actions qu'elle génère sont le résultat de l'action directe des données du capteur, qui peut mettre en évidence les fonctionnalités des actions perçues, adaptées à des environnements totalement inconnus. De nombreux comportements dans l'architecture réactive impliquent principalement une tâche spéciale simple, il semble donc que la planification et le contrôle peuvent être étroitement intégrés, et l'espace de stockage occupé n'est pas grand, ce qui permet de produire des réponses rapides et de fortes performances en temps réel. En même temps, chaque couche doit seulement être responsable d'un certain comportement du système. L'ensemble du système peut réaliser la transition du niveau bas au niveau haut de manière pratique et flexible. De plus, si l'un des modules présente une panne inattendue, le reste. Même si les différentes couches de contrôle peuvent encore produire des résultats significatifs, la robustesse du système a été grandement améliorée. La difficulté est qu'en raison de la flexibilité de l'exécution des actions du système, un mécanisme de coordination spécifique est nécessaire pour résoudre les conflits entre les différentes boucles de contrôle et s'entendre sur les résultats. contention de l'actionneur, afin d'obtenir un résultat significatif.
La structure du système hiérarchique et la structure du système réactif ont toutes deux leurs propres avantages et inconvénients, et il leur est difficile de répondre seuls aux exigences complexes et changeantes de l'environnement de conduite, donc De plus en plus de professionnels de l'industrie ont commencé à étudier les architectures hybrides, combinant efficacement les avantages des deux pour générer des comportements hiérarchiques définis par des objectifs au niveau de la planification globale et une recherche orientée vers les objectifs au niveau de la planification locale des systèmes réactifs.
04 Technologie de contrôle et d'exécution
La technologie de contrôle de base de la conduite autonome est le contrôle longitudinal, le contrôle latéral, le contrôle longitudinal et le contrôle de conduite et de freinage du véhicule, et le contrôle latéral est la direction roue Le réglage de l'angle et le contrôle de la force des pneus réalisent un contrôle automatique longitudinal et transversal, et le fonctionnement du véhicule peut être automatiquement contrôlé en fonction d'objectifs et de contraintes donnés.
Le contrôle longitudinal du véhicule est le contrôle dans le sens de la vitesse de conduite, c'est-à-dire le contrôle automatique de la vitesse du véhicule et de la distance entre le véhicule et les véhicules qui le précèdent ou le suivent ou obstacles. Le régulateur de vitesse et le contrôle du freinage d’urgence sont tous deux des exemples typiques de contrôle longitudinal en conduite autonome. De tels problèmes de contrôle peuvent être attribués au contrôle des entraînements motorisés, des moteurs, des systèmes de transmission et de freinage. Divers modèles de moteur-moteur-transmission, modèles de fonctionnement de véhicule et modèles de processus de freinage sont combinés avec différents algorithmes de contrôleur pour former divers modes de commande longitudinale.
Le contrôle latéral du véhicule fait référence au contrôle perpendiculaire à la direction du mouvement. L'objectif est de contrôler la voiture pour maintenir automatiquement l'itinéraire de conduite souhaité et obtenir un bon confort de conduite et une bonne stabilité sous différentes vitesses, charges, résistance au vent et conditions routières du véhicule. Il existe deux méthodes de conception de base pour le contrôle latéral du véhicule. L'une est basée sur la simulation du conducteur (l'une consiste à utiliser un modèle dynamique plus simple et des règles de manipulation du conducteur pour concevoir le contrôleur ; l'autre consiste à utiliser le processus de manipulation du conducteur. Le contrôleur de formation des données obtient le algorithme de contrôle) ; l'autre est une méthode de contrôle qui donne le modèle mécanique de mouvement latéral de la voiture (un modèle précis de mouvement latéral d'une voiture doit être établi. Un modèle typique est tel qu'un modèle à voie unique, qui prend en compte les caractéristiques de la gauche et les côtés droits de la voiture doivent être identiques)
Résumé 05
En plus de la perception environnementale, du positionnement précis, de la planification des décisions et de l'exécution des contrôles présentés ci-dessus, les véhicules autonomes impliquent également des technologies clés telles que des cartes de haute précision , V2X et tests de véhicules autonomes. La technologie de conduite autonome est une combinaison d'intelligence artificielle, de puces hautes performances, de technologie de communication, de technologie de capteurs, de technologie de contrôle des véhicules, de technologie Big Data et d'autres technologies multi-domaines. En outre, pour la mise en œuvre de la technologie de conduite autonome, il est nécessaire de mettre en place des installations de transport de base répondant aux exigences de la conduite autonome et de prendre en compte les lois et réglementations concernant la conduite autonome.
Ce qui précède est le contenu détaillé de. pour plus d'informations, suivez d'autres articles connexes sur le site Web de PHP en chinois!
Articles Liés
Voir plus- Tendances technologiques à surveiller en 2023
- Comment l'intelligence artificielle apporte un nouveau travail quotidien aux équipes des centres de données
- L'intelligence artificielle ou l'automatisation peuvent-elles résoudre le problème de la faible efficacité énergétique des bâtiments ?
- Co-fondateur d'OpenAI interviewé par Huang Renxun : les capacités de raisonnement de GPT-4 n'ont pas encore atteint les attentes
- Bing de Microsoft surpasse Google en termes de trafic de recherche grâce à la technologie OpenAI