
Maison >Périphériques technologiques >IA >Un article explique comment les capteurs du système ADAS doivent être disposés
Un article explique comment les capteurs du système ADAS doivent être disposés

- WBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBavant
- 2023-05-05 10:49:061606parcourir
Cet article présente d'abord l'importance de la stratégie de placement des capteurs dans les systèmes avancés d'aide à la conduite et propose des types de capteurs avancés pour les systèmes d'aide à la conduite, notamment des caméras intelligentes tournées vers l'avenir, des radars à ondes millimétriques orientés vers l'avant et latéraux. (77 GHz/22 GHz), radar à ultrasons et caméra à vision panoramique, décrivant brièvement les caractéristiques de performance de chaque capteur. Ensuite, en prenant comme exemple la solution d'un fournisseur de production de masse actuel, différents paramètres de performances des capteurs sont présentés en détail, notamment la distance de détection, la plage de détection et les exigences relatives à l'environnement de configuration externe. Cet article présente les fonctions qui peuvent être réalisées en utilisant différents capteurs sur les véhicules uniquement et les stratégies de fusion de différents capteurs avec différents niveaux d'assistance à la conduite et différentes combinaisons de fonctions. Enfin, il présente comment installer raisonnablement différents capteurs sur le véhicule, sur la base des exigences de performances requises et de la redondance de la plage de détection, un plan de mise en œuvre spécifique est proposé et ses exigences d'implantation sont analysées et expliquées en détail.
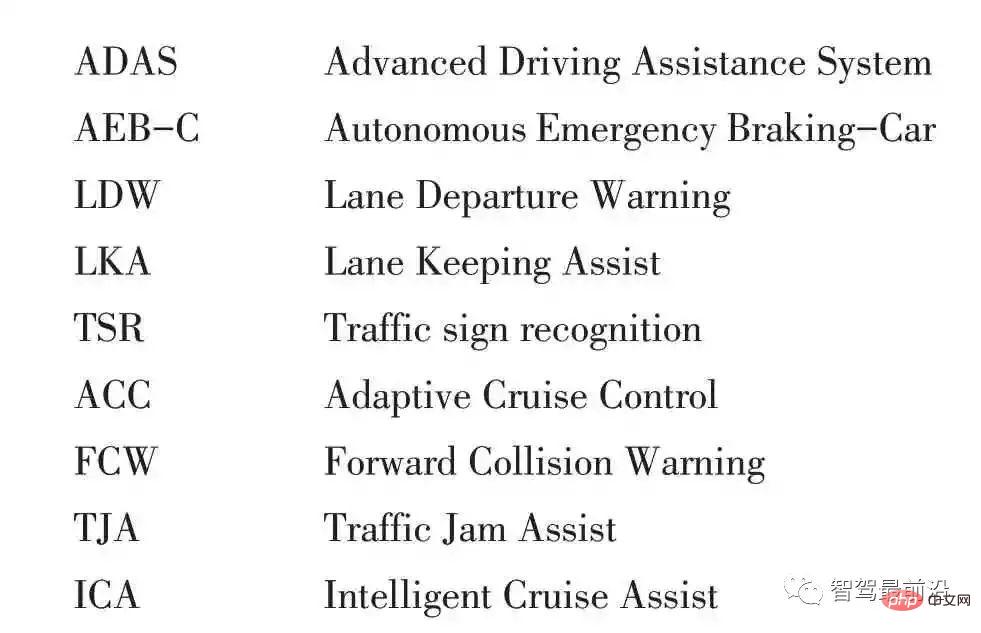
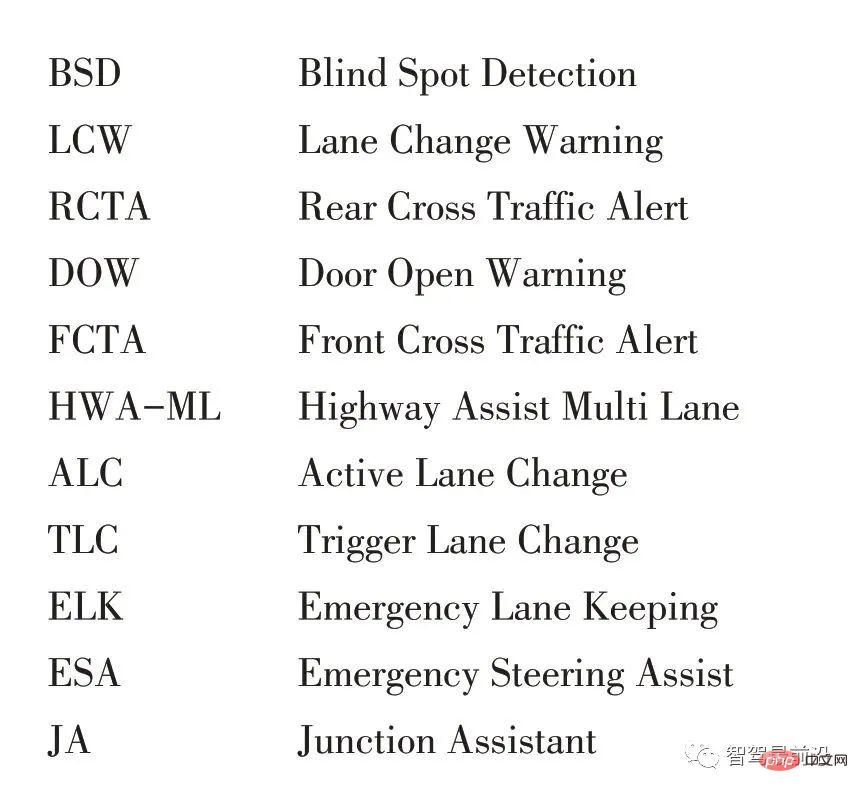
Abréviation#🎜 🎜## 🎜🎜#
Avec les progrès de la science et de la technologie et le développement rapide de la technologie de conduite autonome, de plus en plus de voitures sont actuellement équipées de systèmes avancés d'aide à la conduite ou de systèmes de conduite assistée. classé comme conduite autonome de niveau 5 dans le niveau de conduite autonome SAE J3016TM. La conduite autonome utilise une variété de capteurs (radar à ultrasons, radar à ondes millimétriques, caméras intelligentes, caméras haute définition/définition standard, lidar, etc.) Wang Tian et al. , et radar à ondes millimétriques dans le système de perception de conduite autonome. Yuan Xiuzhen a analysé l'industrie de la technologie des capteurs de véhicules autonomes et a développé les applications matérielles importantes, telles que le lidar, les caméras, la détection par ultrasons, etc. Dans la chaîne de valeur du développement de la conduite autonome, le développement de pièces de capteurs est principalement concentré chez les fournisseurs de pièces automobiles nationaux et étrangers, tandis que l'intégration des fonctions du véhicule est réalisée par les constructeurs OEM.Zhang Yanyong et al. ont proposé un algorithme de fusion de perception de conduite autonome basé sur la fusion multimodale. De nombreux ingénieurs ont tendance à concentrer leurs efforts de développement sur le développement d'algorithmes et la conception de systèmes, mais des problèmes surviennent souvent. La situation est que les stratégies matérielles et logicielles de capteurs appliquées avec succès fonctionnent bien sur certains modèles OEM, mais ont des effets moyens, voire négatifs, sur d'autres OEM. En effet, dans la recherche et le développement de la conduite autonome, la prise en compte de chaque maillon est essentielle. En tant que développement en boucle fermée, un bon algorithme est basé sur une détection précise de la détection frontale du capteur. Différents types de capteurs matériels ont des exigences différentes en matière de performances de détection des capteurs. Un point particulièrement important qui affecte les performances de détection est le placement et la disposition des capteurs. . Chemin. Cet article donne une brève introduction à la méthode de configuration basée sur les caractéristiques de performances de détection des capteurs couramment utilisés dans la conduite autonome.
Introduction au capteur du système avancé d'aide à la conduite
Le système avancé d'aide à la conduite (ADAS) utilise des capteurs pour surveiller le processus de conduite de la voiture. l'environnement environnant en temps réel, collecte des données, détecte la fusion et effectue une analyse décisionnelle sur les données détectées, et enfin contrôle le véhicule et fournit une alerte précoce au conducteur.Les caméras peuvent obtenir de riches informations environnementales, notamment la couleur, la forme, le matériau, etc. de l'objet, et la vision par ordinateur 2D a fait de nombreux progrès. ce champ. Détection de signal lumineux, classification d'objets, etc. Le radar à ondes millimétriques peut obtenir des informations précises sur la distance, a une forte capacité de pénétration, peut résister à l'influence des changements météorologiques et environnementaux et peut réaliser une détection et une détection à longue distance.
Actuellement, il existe 4 types de capteurs sur les véhicules autonomes produits en série, au nombre de 22 (Tableau 1).
Caméras intelligentes à vue frontale : les caméras simples, doubles et triples sont couramment utilisées. Elles sont principalement utilisées dans les scènes à moyenne et longue distance et peuvent identifier les lignes de voie claires, les panneaux de signalisation, les obstacles et les piétons, mais sont très sensibles à l'éclairage, aux conditions météorologiques et à d'autres conditions, et nécessitent la prise en charge d'algorithmes complexes et des exigences de processeur relativement élevées.
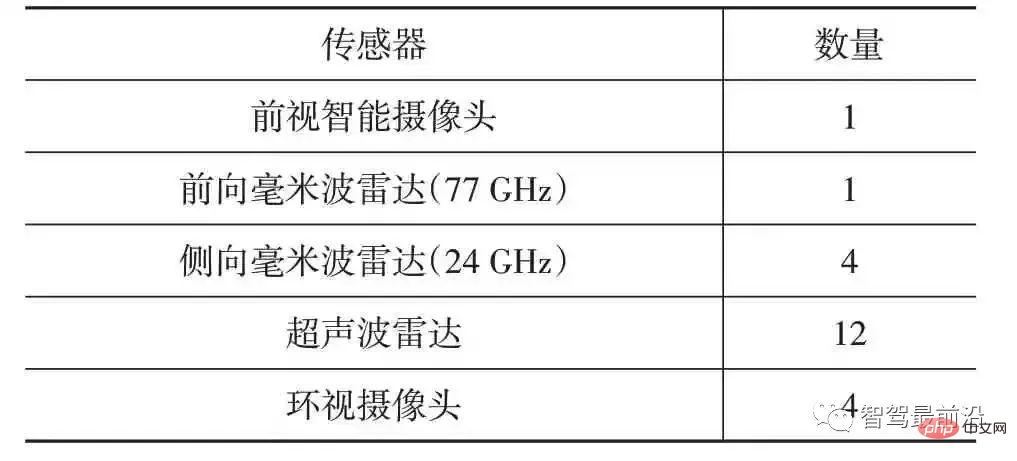
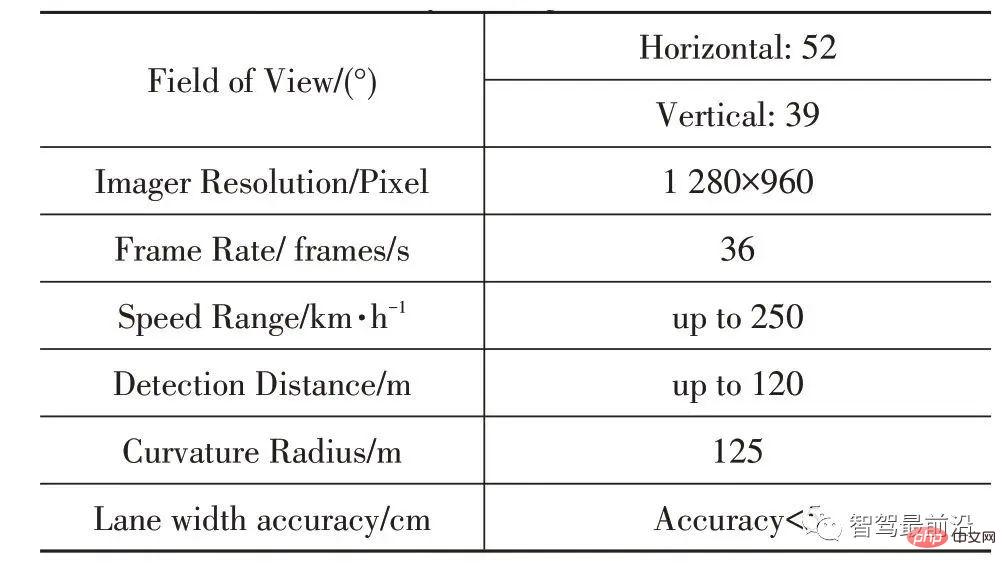
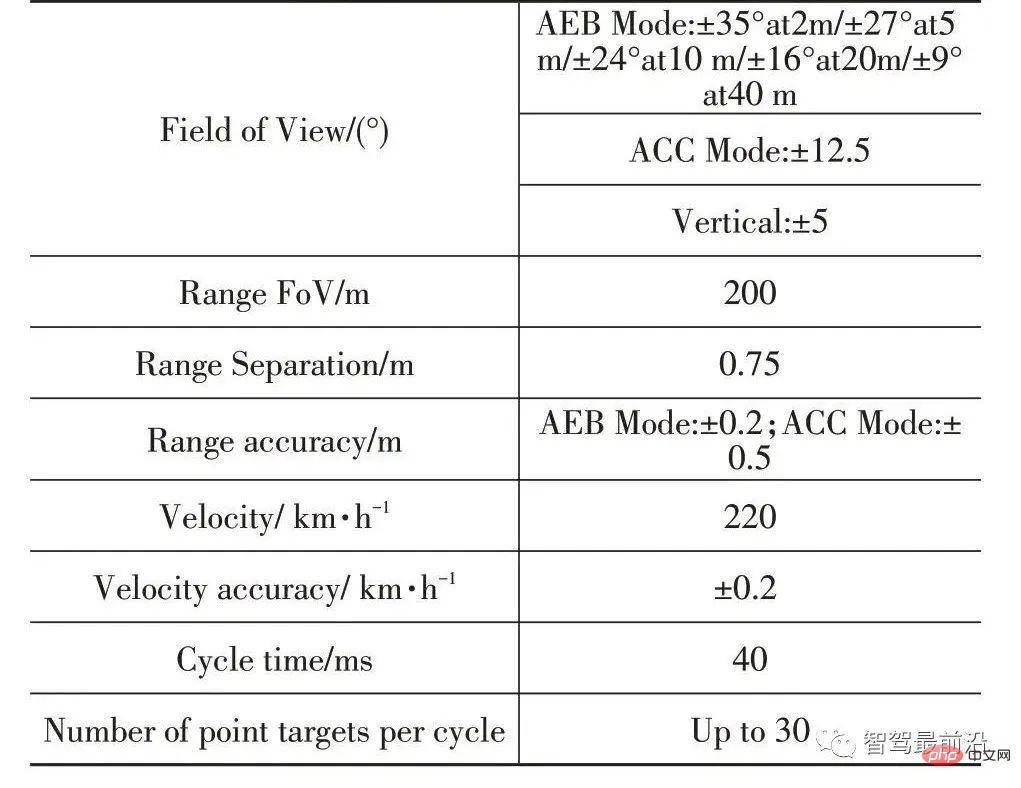
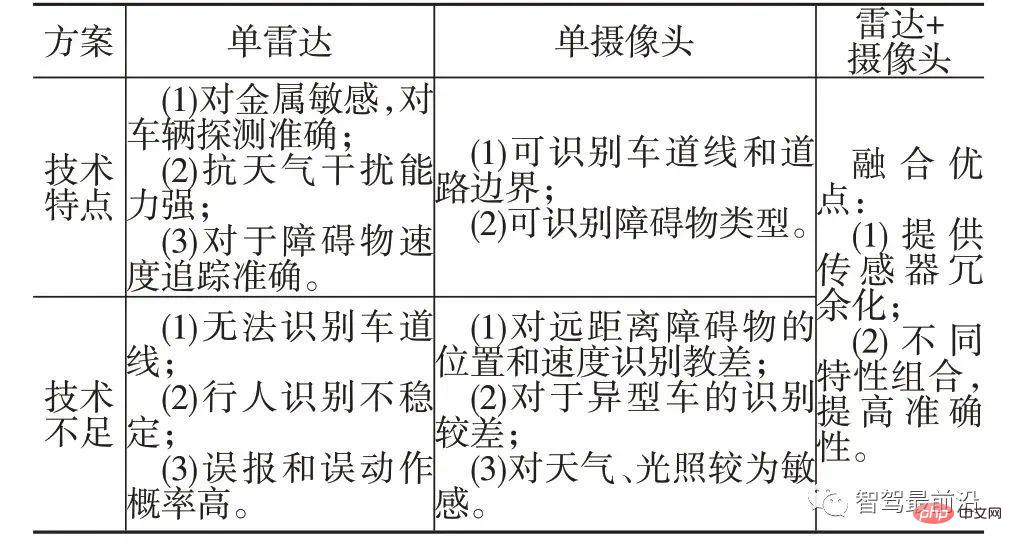
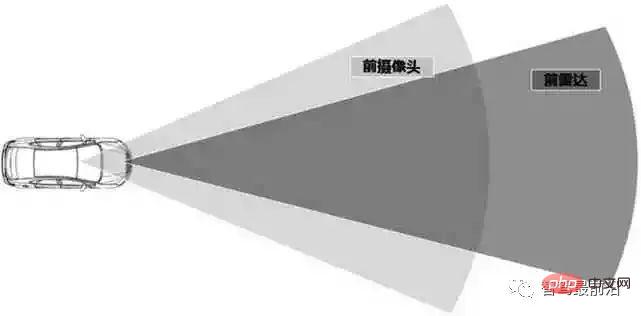
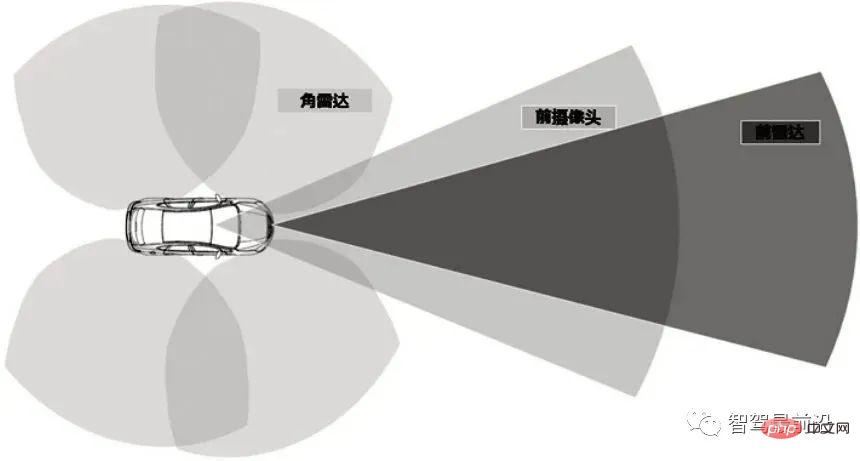
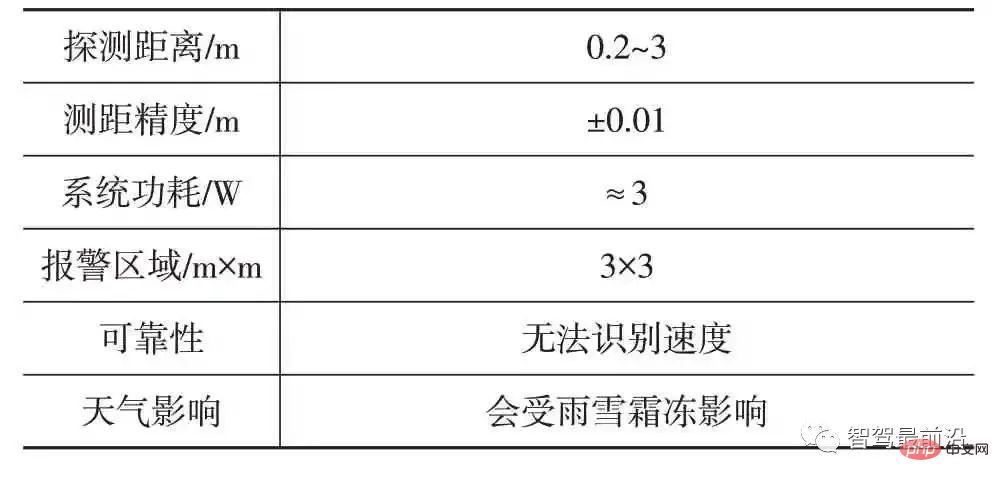
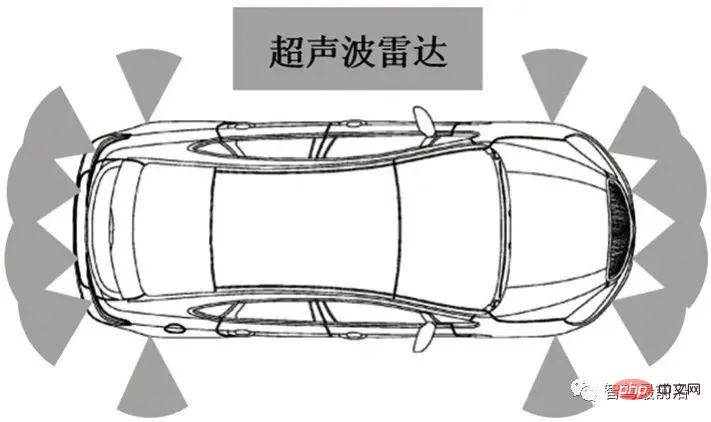
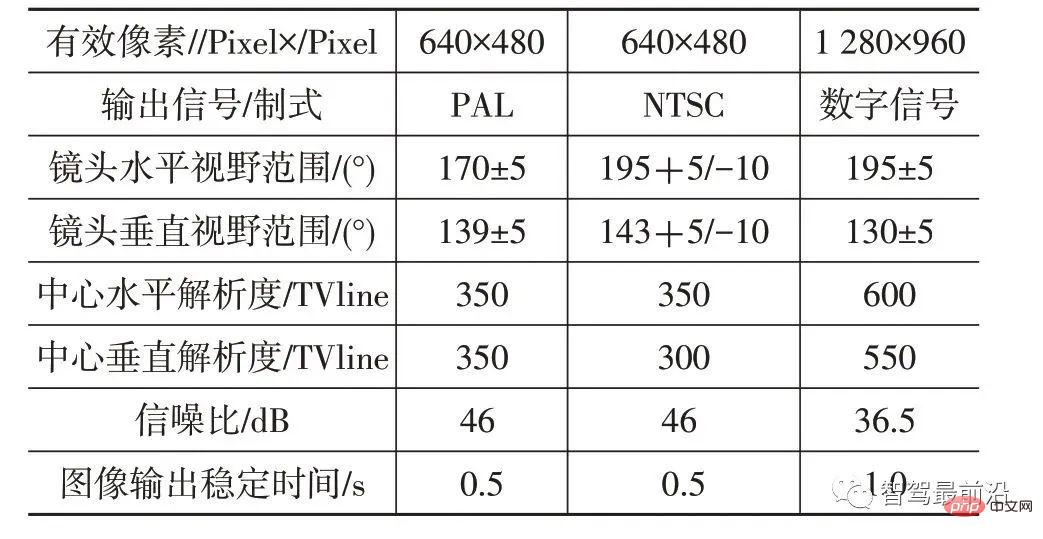
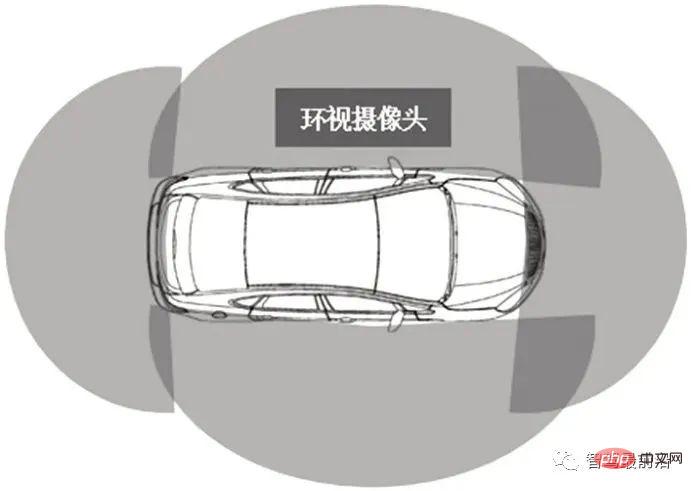
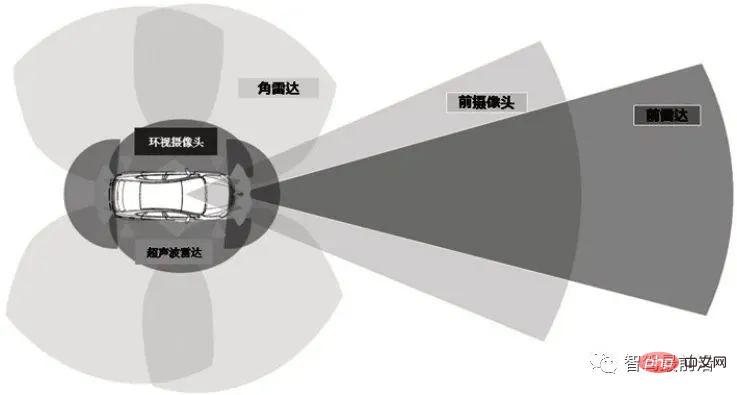
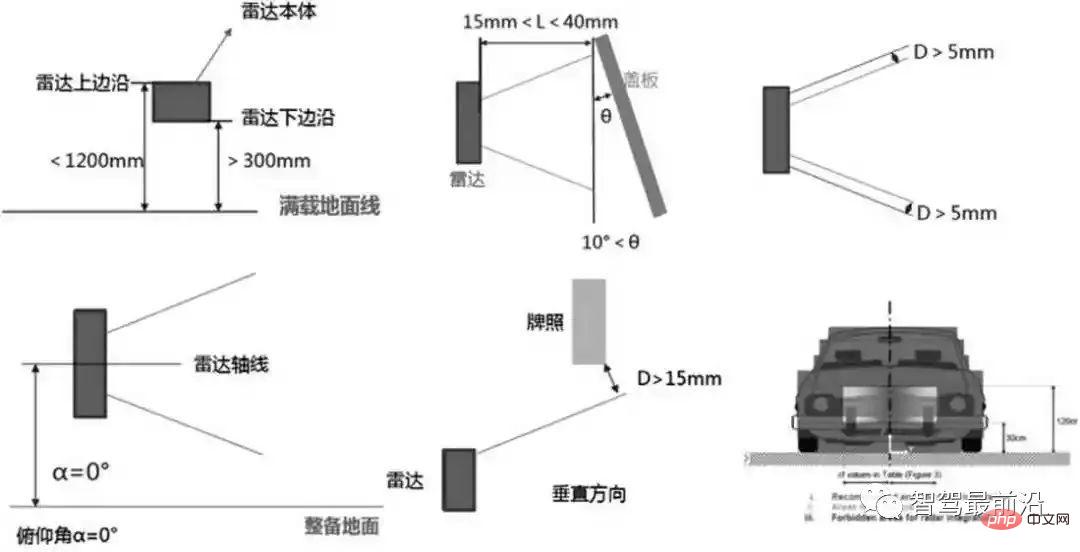
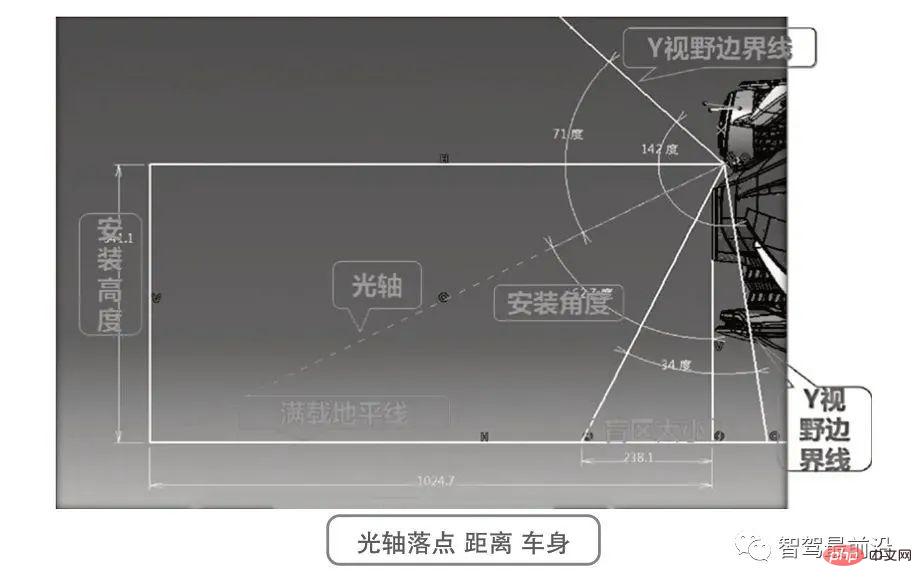
Tableau 1 Classification avancée des capteurs du système d'aide à la conduite #🎜 🎜# Radar à ondes millimétriques : Il existe deux types principaux : le radar 24 GHz pour les mesures à courte et moyenne portée et le radar 77 GHz pour les mesures à longue portée. Le radar à ondes millimétriques peut extraire efficacement des informations sur la profondeur de champ et la vitesse, identifier les obstacles et a une certaine capacité à pénétrer le brouillard, la fumée et la poussière. Cependant, dans le cas d'obstacles environnementaux complexes, car les ondes millimétriques dépendent des ondes sonores pour le positionnement, le son. les ondes apparaissent réfléchies de manière diffuse. En conséquence, le taux de détection manquée et le taux d’erreur sont relativement élevés. Radar à ultrasons : il est principalement utilisé dans des scénarios à courte distance pour envoyer des ondes ultrasonores et recevoir des signaux ultrasoniques réfléchis, et envoyer les résultats de détection au contrôleur. La consommation d'énergie des ondes ultrasonores est lente, la pénétration est forte, la méthode de mesure de distance est simple et le coût est faible. Cependant, il présente certaines limites dans la mesure de la distance à grande vitesse. Lorsqu'une voiture roule à grande vitesse, la télémétrie ultrasonique ne peut pas suivre les changements en temps réel de la distance entre les voitures, et l'erreur est importante. Les ondes ultrasoniques ont un grand angle de diffusion et une faible directivité lors de la mesure de cibles distantes, leurs signaux d'écho seront relativement faibles, affectant la précision des mesures. Cependant, dans les mesures à courte distance, les capteurs de télémétrie à ultrasons présentent de grands avantages. Caméra à vision panoramique : elle est principalement utilisée dans les scènes à courte distance et peut identifier les obstacles, mais elle est très sensible aux conditions extérieures telles que la lumière et la météo. La technologie est mature et le prix est bas. Avec le développement et les progrès continus de la technologie, les pixels des caméras augmentent progressivement, passant des 300 000 pixels initiaux au million de pixels actuel. Au cours des trois prochaines années, les caméras à 2 millions de pixels deviendront populaires. La combinaison de différents capteurs du système avancé d'aide à la conduite peut réaliser différentes fonctions. Les 22 capteurs présentés ci-dessus sont tous installés sur le véhicule, qui peuvent réaliser ADASL1/L2/L3, comme suit. Introduire des sous-fonctions détaillées. La caméra intelligente orientée vers l'avant met en œuvre AEB-C (freinage d'urgence automatique - voiture), LDW (avertissement de sortie de voie), LKA (assistance au maintien de voie), Reconnaissance des panneaux TSR (Trafic) pour atteindre le niveau d'assistance à la conduite L1. La détection réelle de l'état de la route est précise (comme les lignes de voie, les tunnels, les rampes, les limites de vitesse, etc.), mais la détection de distance n'est pas précise. Ses paramètres de performance représentatifs sont présentés dans le tableau 2. Tableau 2 Quelques paramètres de performance du Mobileye EYEQ3 Le radar à ondes millimétriques avant (77 GHz) réalise ACC (Adaptive Cruise), AEB-C (Automatic Emergency Braking - Vehicle), FCW (Forward Collision Warning), atteignant le niveau d’assistance à la conduite L1. La détection de distance est précise, mais elle ne peut pas prédire les conditions réelles (telles que les lignes de voie, les tunnels, les rampes, les limites de vitesse, etc.). Ses paramètres de performance représentatifs sont présentés dans le tableau 3. Tableau 3 Quelques paramètres de performance de l'AC1000 Fusion d'une caméra intelligente orientée vers l'avant et d'un radar à ondes millimétriques orienté vers l'avant pour obtenir un freinage d'urgence automatique ACC, AEB-C/P - véhicule/personne ), LDW, LKA, TSR, TJA (Traffic Jam Assist), ICA (Intelligent Cruise Assist), qui peuvent atteindre une assistance à la conduite de niveau L2 (Figure 1). Les informations sur la distance et la route sont toutes des données fusionnées et la détection est précise. La comparaison d'un radar unique, d'une caméra unique et d'une solution de fusion est présentée dans le tableau 4. Tableau 4 Comparaison des solutions de radar unique, de caméra unique et de fusion Figure 1 Fusion d'une caméra intelligente avant et d'un radar à ondes millimétriques avant Le radar à ondes millimétriques latérales (24 GHz) met en œuvre la fonction de surveillance des zones aveugles et il existe 2 méthodes de mise en œuvre. Radars à ondes millimétriques sur la face arrière, réalisant les fonctions BSD (surveillance des angles morts), LCW (avertissement de collision par changement de voie), RCTA (avertissement de passage à niveau arrière) et DOW (avertissement d'ouverture de porte) sur la face arrière + ; 2 sur la face avant Un radar à ondes millimétriques, en plus de réaliser les fonctions ci-dessus, peut également réaliser le FCTA (forward cross traffic alert) et prendre en charge des fonctions avancées d'aide à la conduite au-dessus du niveau L2. Avec les progrès de la science et de la technologie, les performances des radars à ondes millimétriques latérales s'améliorent également progressivement, voir le tableau 5. Tableau 5 Paramètres partiels et développement du radar à ondes millimétriques latérales Radar à ondes millimétriques latérales (4), radar à ondes millimétriques avant (1), caméra intelligente avant (1) peuvent être utilisés en combinaison pour atteindre une conduite autonome de niveau L2+ (ou L3-). En conduite autonome de niveau L2, TJA/HWAML (Highway Driving Assist - Multi-lane), ALC (Active Lane Change Assist), TLC (Triggered Lane Change Assist), ELK (Emergency Lane Keeping) et ESA (Emergency Steering Assist) sont ajouté), JA (assistance aux intersections), avertissement général (y compris BSD/DOW/RCTA/FCTA/LCW) (Figure 2). Il peut réaliser une fonction de conduite automatique dans des conditions routières. Figure 2 Fusion d'une caméra avant, d'un radar à ondes millimétriques avant et d'un radar d'angle Selon les caractéristiques de détection de cibles à courte distance par radar à ultrasons (tableau 6), Le radar à ultrasons est basé sur différentes combinaisons de quantités qui peuvent réaliser les fonctions PDC (radar de recul), APA (aide au stationnement automatique) et BSD (surveillance des angles morts). Quatre radars à ultrasons sont installés sur le pare-chocs arrière pour réaliser la fonction PDC. Certains véhicules disposent de quatre radars à ultrasons installés simultanément sur le pare-chocs avant (un total de 8 radars à ultrasons à l'avant et à l'arrière) pour détecter les obstacles devant lors de la marche arrière. Quatre radars à ultrasons sont installés sur les côtés des pare-chocs avant et arrière pour réaliser la fonction de surveillance des angles morts à courte portée. En même temps, combinés à 8 radars à ultrasons avant et arrière, un total de 12 radars à ultrasons peuvent réaliser la fonction APA. . Si un radar à angle d'onde millimétrique est installé sur le côté du véhicule pour mettre en œuvre la fonction BSD, il n'est pas nécessaire d'installer le radar à ultrasons sur le côté. La principale raison pour laquelle BSD a installé un radar à ultrasons est son avantage en termes de coût. Les différentes combinaisons et fonctions du radar à ultrasons sont présentées dans la figure 3. Tableau 6 Quelques paramètres et caractéristiques du radar à ultrasons Figure 3 Disposition de la solution radar à ultrasons système d’imagerie de surveillance de type AVM) via le avant et arrière Les quatre capteurs d'image gauche et droit (caméras à vision panoramique) collectent des données sur l'environnement du véhicule et transmettent les images au contrôleur d'image panoramique via CVBS (définition standard)/LVDS (haute définition). Si une seule caméra est installée à l'arrière, la fonction d'image inversée peut être réalisée. Si quatre caméras sont installées simultanément à l'avant, à l'arrière, à gauche et à droite, la correction de la distorsion et le recadrage des images d'entrée des quatre caméras seront effectués pour obtenir l'intégration de quatre vues et des effets de vue de dessus 2D, l'intégration de la 3D. effets de rotation (solution HD), et enfin affichage via MP5. Certains paramètres importants de la caméra à vision panoramique sont présentés dans le tableau 7 et leur disposition est illustrée dans la figure 4 de l'ensemble du véhicule. La disposition combinée entre les différents capteurs du système avancé d'aide à la conduite doit prendre en compte la couverture et la redondance. Les plages de détection des différents capteurs ont leurs propres avantages et limites. La tendance actuelle en matière de développement consiste à utiliser la technologie de fusion des informations des capteurs pour combler les lacunes d'un seul capteur et améliorer la sécurité et la fiabilité de l'ensemble du système de conduite intelligent. Couverture : 360° de la carrosserie du véhicule doivent être couverts. Selon l'importance, la distance de détection à l'avant est plus longue (120 m), la distance de détection à l'arrière est légèrement plus courte (80 m) et la distance de détection à l'arrière. les côtés gauche et droit sont les plus courts (20 m). Afin de garantir la sécurité, chaque zone doit être couverte par 2 capteurs ou plus pour une vérification mutuelle. La figure 5 montre le plan d'aménagement. Tableau 7 Quelques paramètres de la caméra à vue panoramique Figure 4 Disposition de la solution de caméra à vue panoramique disposition et fusion des capteurs La position d'installation du radar avant est définie en fonction des exigences des paramètres de performance du radar et de la forme du corps, et la position de disposition raisonnable est définie. Il est recommandé que la hauteur du radar au-dessus du sol (la distance entre l'axe de l'antenne radar et le sol) soit de 50 cm, et toute hauteur comprise entre 30 cm et 120 cm est acceptable. À des hauteurs proches de 30 cm au-dessus du sol, des signaux réfléchis par le sol excessifs peuvent interférer avec la réception directe des signaux et réduire le risque de détection. La distance entre le radar et le capot de protection est supérieure à 15 mm (2 fois la longueur d'onde, ce qui permet d'éviter l'influence de champs proches complexes sur le faisceau radar) et inférieure à 40 mm (pour éviter une surface d'intersection trop grande des ondes radar ). Les coordonnées de position latérale du radar sont comprises entre -30 cm et 30 cm. Si le radar est installé avec un capot avant, il a également des exigences particulières pour le capot, comme un rayon de courbure > 600 mm, une épaisseur uniforme à l'intersection entre le faisceau et le capot, un profil qui doit subir des tests de simulation. , un matériau dont les propriétés électriques doivent être testées, et des pièces non pulvérisées, etc. La distance entre le faisceau radar à ondes millimétriques et les structures environnantes est > 5 mm, l'angle avec le véhicule - angle de tangage, angle de lacet et angle de roulis est de 0°. La distance entre le champ de vision du radar et le cadre de la plaque d'immatriculation est supérieure. que 15 mm, afin d'éviter d'affecter la détection radar après l'installation de la plaque d'immatriculation, etc. Comme le montre la figure 6. Figure 6 Schéma de configuration du radar à ondes millimétriques avant Disposition et intégration du radar à ondes millimétriques latérales (radar angulaire) Le radar d'angle définit une position de disposition raisonnable en fonction de ses exigences en matière de paramètres de performance et de la forme du corps, et le corps doit réserver de l'espace pour l'aménagement. Exigences de hauteur pour la disposition angulaire du radar : trop basse, la boue, l'eau et la saleté affecteront le radar trop haut, la zone aveugle à proximité du véhicule deviendra plus grande (peut entraîner l'absence de champ de vision au-delà de ±20°), la hauteur recommandée ; est compris entre 400 mm et 1 000 mm. Pour minimiser la zone aveugle, l'angle entre le radar et l'axe longitudinal du véhicule doit être compris entre 30° et 45°, et l'angle entre le radar et le plan horizontal du véhicule est mieux contrôlé à 90°. Il n'y a pas de métal, de crêtes, de structures multicouches ou de matériaux dans le champ de vision du radar. L'angle maximum entre le champ de vision et le couvercle est de 70°. Le couvercle doit être plat et la courbure doit être supérieure à 350 mm. Figure 7 Schéma de disposition de la caméra avant Afin de réaliser la fonction APA, 12 radars à ultrasons doivent être déployés sur l'ensemble du véhicule, et le nombre de les mises en page sont relativement grandes. Le capteur radar à ultrasons est monté sur le support de montage et fixé par collage avec la peau du pare-chocs. Afin de répondre au maximum aux exigences de détection, l'emplacement de la configuration du radar à ultrasons fournit des exigences spécifiques, voir Figure 8. Les exigences spécifiques pour l'aménagement comprennent : éviter de placer le radar sur la surface du pare-chocs de la voiture, éviter de prendre des photos qui interfèrent avec la zone de détection du radar, se tenir à l'écart des tuyaux d'échappement des sources de chaleur, des lampes à haute puissance, etc. Figure 8 Exigences relatives à l'emplacement de la configuration du radar à ultrasons Le système de vision panoramique AVM nécessite un total de 4 caméras disposées à l'avant, à l'arrière, à gauche et à droite de la carrosserie. La caméra frontale est installée dans la zone proche de la calandre. La caméra arrière est installée sur ou à proximité de l'éclairage de plaque d'immatriculation de porte arrière. Les caméras gauche et droite doivent être installées au bas du boîtier du rétroviseur, et un trou pour caméra doit être réservé dans les rétroviseurs gauche et droit pour faciliter l'installation des caméras gauche et droite. L'étalonnage optique doit être effectué lorsque les caméras sont disposées de manière à garantir que les images des caméras adjacentes se chevauchent suffisamment, et l'épissage des images doit pouvoir garantir qu'il n'y a pas de bords noirs dans l'erreur d'assemblage de 1° de la caméra, et le la zone aveugle ne doit pas dépasser les exigences des normes de l’entreprise. Afin d'éviter que l'image panoramique ne soit épissée en raison de modifications de l'image capturée, la caméra doit avoir une structure de positionnement anti-rotation. Exigences de disposition des caméras avant et arrière : Lorsque le véhicule est complètement chargé, la hauteur au-dessus du sol est ≥ 600 mm et la distance par rapport au plan central est ≤ 50 ; mm Il est recommandé de le placer sur le plan central ; l'axe visuel est entre le véhicule et le véhicule. Il est recommandé que l'angle entre l'axe visuel et l'axe Z du véhicule soit de 45° ; 75° Le point d'intersection de l'axe optique et de la ligne au sol est situé à 1 000 à 2 000 mm du côté le plus extérieur de la carrosserie du véhicule ; le champ de vision de l'angle mort est ≤ 200 mm ; à 3 000 mm Les objets jusqu'à 3 000 mm de hauteur au sol sont entièrement visibles. La figure 9 montre les exigences de disposition pour la caméra à vision panoramique (avant). Figure 9 Exigences de disposition de la caméra à vue panoramique (avant) # 🎜🎜# En plus d'assurer la redondance de couverture de la plage de détection, les capteurs du système avancé d'aide à la conduite doivent également respecter les conditions d'installation de chaque capteur et véhicule lors des opérations réelles. installation. Les paramètres de disposition des capteurs introduits dans cet article sont résumés et fusionnés en fonction d'un certain modèle de voiture et de produits de capteurs d'un fournisseur spécifique. Différents fournisseurs de capteurs auront des exigences de configuration légèrement différentes. Au cours du processus de configuration du modèle de véhicule, des ajustements adaptatifs doivent être effectués en fonction des exigences de configuration fournies par le fournisseur, ainsi que de la configuration et de la forme du véhicule. Les capteurs réalisent une combinaison de configuration fonctionnelle
Caméra intelligente orientée vers l'avant et radar à ondes millimétriques orienté vers l'avant
Radar à ondes millimétriques latérales (radar d'angle)

Radar à ultrasons
Caméra à vue panoramique
Fusion de la disposition des véhicules des capteurs
 intelligence avancée L'intégration de la caméra et de la disposition du radar à ondes millimétriques avant
intelligence avancée L'intégration de la caméra et de la disposition du radar à ondes millimétriques avant
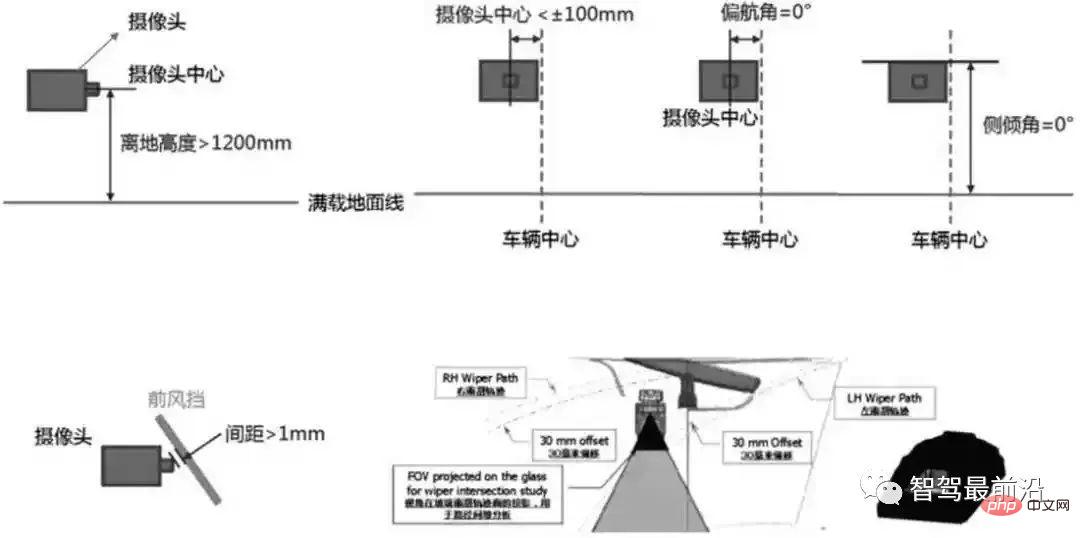
 La meilleure position d'installation verticale de la caméra avant est au centre du pare-brise, la hauteur est de préférence supérieure à 1 200 mm et le décalage est autorisé Déplacez la ligne médiane du pare-brise à moins de 10 cm. L'angle de lacet, l'angle de roulis et l'angle de tangage sont de préférence proches de 0° (± 3°). Le support doit être installé dans une zone vitrée propre et la zone de visualisation ne doit pas être bloquée par une sérigraphie ou une impression. La distance entre la fenêtre de la caméra et la ligne de piste d'essuie-glace doit être supérieure à 30 mm et l'espace entre le module d'objectif et le pare-brise doit être d'au moins 1 mm. Les ouvertures doivent être déterminées par l'angle de vue projeté sur chaque couche du pare-brise. Des trous de ventilation (zone d'ouverture supérieure à 120 mm2) doivent être conçus sur le support et le couvercle de la caméra pour assurer la circulation de l'air. La tolérance de position du support lorsqu'il est monté sur le pare-brise est généralement de ±1 mm (positionnement) et de ±2,5° (rotation) (Fig. 7).
La meilleure position d'installation verticale de la caméra avant est au centre du pare-brise, la hauteur est de préférence supérieure à 1 200 mm et le décalage est autorisé Déplacez la ligne médiane du pare-brise à moins de 10 cm. L'angle de lacet, l'angle de roulis et l'angle de tangage sont de préférence proches de 0° (± 3°). Le support doit être installé dans une zone vitrée propre et la zone de visualisation ne doit pas être bloquée par une sérigraphie ou une impression. La distance entre la fenêtre de la caméra et la ligne de piste d'essuie-glace doit être supérieure à 30 mm et l'espace entre le module d'objectif et le pare-brise doit être d'au moins 1 mm. Les ouvertures doivent être déterminées par l'angle de vue projeté sur chaque couche du pare-brise. Des trous de ventilation (zone d'ouverture supérieure à 120 mm2) doivent être conçus sur le support et le couvercle de la caméra pour assurer la circulation de l'air. La tolérance de position du support lorsqu'il est monté sur le pare-brise est généralement de ±1 mm (positionnement) et de ±2,5° (rotation) (Fig. 7).
 Fusion de disposition de radar à ultrasons
Fusion de disposition de radar à ultrasons 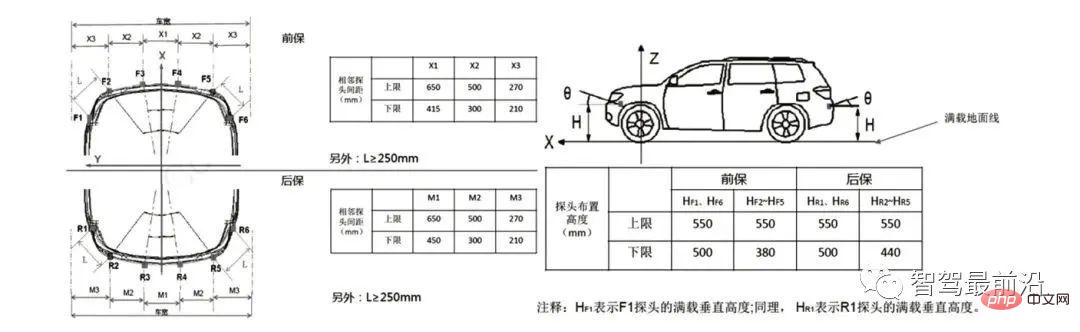
#🎜🎜 #surroundviewcamera
Ce qui précède est le contenu détaillé de. pour plus d'informations, suivez d'autres articles connexes sur le site Web de PHP en chinois!
Articles Liés
Voir plus- Tendances technologiques à surveiller en 2023
- Comment l'intelligence artificielle apporte un nouveau travail quotidien aux équipes des centres de données
- L'intelligence artificielle ou l'automatisation peuvent-elles résoudre le problème de la faible efficacité énergétique des bâtiments ?
- Co-fondateur d'OpenAI interviewé par Huang Renxun : les capacités de raisonnement de GPT-4 n'ont pas encore atteint les attentes
- Bing de Microsoft surpasse Google en termes de trafic de recherche grâce à la technologie OpenAI