
Maison >Périphériques technologiques >IA >Une fois le matériel de conduite autonome pré-intégré, comment les constructeurs automobiles réalisent-ils une boucle fermée de données ?
Une fois le matériel de conduite autonome pré-intégré, comment les constructeurs automobiles réalisent-ils une boucle fermée de données ?

- 王林avant
- 2023-04-15 09:46:021454parcourir
Le pré-intégration matérielle est un nouveau modèle adopté par les constructeurs automobiles dans la tendance de la conduite autonome. Autrement dit, en pré-intégrant le matériel dans la voiture, les utilisateurs peuvent mieux utiliser les voitures suivantes simplement en mettant à jour continuellement le logiciel . expérience tout en réduisant la pression sur les équipementiers pour mettre leurs modèles sur le marché. Il existe un lien nécessaire entre le pré-intégration matérielle et la mise à niveau à distance OTA. Après avoir parlé de la pré-intégration matérielle, nous parlerons du principe de l'OTA.
Avant cela, abordons d'abord un sujet dont ni le pré-intégration matérielle ni l'OTA ne peuvent se débarrasser : comment les constructeurs automobiles réalisent-ils une boucle fermée de données pendant la recherche et le développement ?
En ce qui concerne le pré-intégration matérielle et l'OTA, lorsque vous sortez et tournez à gauche, vous pouvez voir le contenu qui a été trié à l'arrière.
Retour aux affaires, revenons au sujet de ce numéro : Une fois le matériel de conduite autonome pré-embarqué, comment les constructeurs automobiles réalisent-ils une boucle fermée de données ?

Les 5 étapes pour réaliser des données fermées en boucle
ni propose une méthode en 5 étapes pour la collecte / traitement des données pour créer une boucle fermée de données:
- Road test
- Gestion du Big data
- Virtualisation de scénarios
- Retour de données en boucle ouverte
- Données en boucle fermée
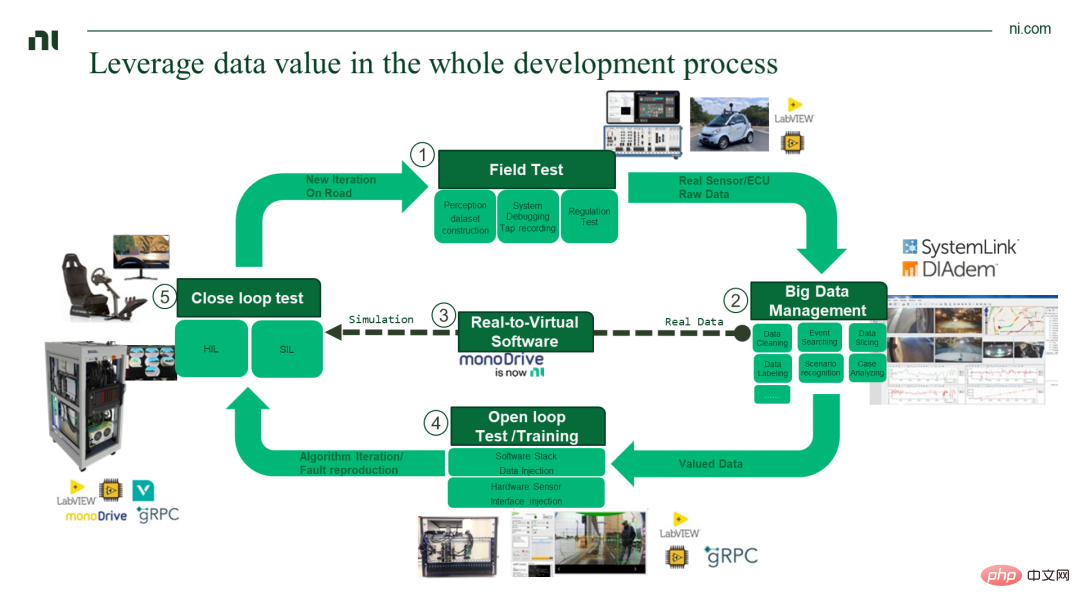
De la collecte de données aux données en boucle fermée, seulement 5 étapes
1. Essai routier - Système d'enregistrement de données AD
L'essai routier est une source importante de collecte de données de scène réelles, qu'il s'agisse de communication dans le véhicule ou de communication véhicule-route. , de gros lots de données doivent être traités dans des systèmes de test automatiques. Généralement, des équipements de collecte, de synchronisation et de stockage de données sont nécessaires.
De quels types de capteurs les voitures autonomes ont-elles besoin ?
Les véhicules autonomes sont des véhicules autonomes qui intègrent des fonctions de détection, de prise de décision et de contrôle, parmi lesquels le système de détection remplace les fonctions de vue, d'audition, de toucher, etc. du conducteur humain, et intègre le trafic massif collecté par des caméras, radars et autres capteurs. Les données environnementales identifient avec précision divers éléments de trafic pour soutenir les systèmes de prise de décision des véhicules autonomes.
1. Caméra
Les caméras sont divisées en deux catégories selon les méthodes de collecte de vidéos : les caméras numériques et les caméras analogiques.
Les appareils photo numériques sont généralement utilisés dans les véhicules, qui peuvent convertir les signaux vidéo analogiques générés par l'équipement de capture vidéo en signaux numériques, puis les stocker dans l'ordinateur.
Une caméra analogique ne peut convertir le signal vidéo capturé en mode numérique que via une carte de capture vidéo spécifique, puis le compresser avant de le convertir en ordinateur pour l'utiliser.
Par exemple, le téléphone fixe que nous utilisons est un signal analogique, qui est sujet au bruit (son actuel ou inaudibilité) pendant l'appel. Afin de maintenir une bonne qualité d'appel, nos téléphones mobiles numérisent les signaux analogiques du téléphone. La qualité des appels entre téléphones mobiles est très claire. En utilisant le même principe, l'utilisation d'un appareil photo numérique peut réduire efficacement le bruit de l'image et l'améliorer. l’effet d’imagerie.
En une phrase : les signaux vidéo analogiques peuvent avoir une infinité de valeurs différentes dans une certaine plage de temps. Le signal vidéo numérique est formé par échantillonnage, quantification et codage sur la base du signal analogique. Les signaux analogiques sont sujets au bruit et aux interférences et ont été progressivement remplacés par des signaux numériques.

Source photo : Site officiel de Bosch
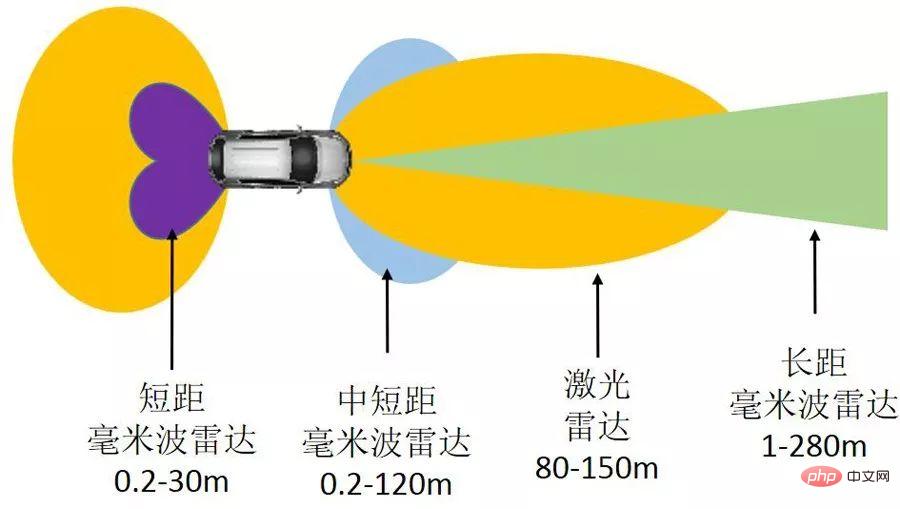
2. Radar
Le radar peut détecter activement l'environnement environnant et est moins affecté par l'environnement extérieur que les capteurs visuels. C'est l'un des capteurs importants pour les véhicules autonomes. Le radar émet des ondes électromagnétiques vers la cible et reçoit l'écho, obtenant ainsi des données telles que la distance de la cible, son orientation et le taux de changement de distance. Selon la bande d'ondes électromagnétiques, les radars peuvent être subdivisés en trois catégories : lidar, radar à ondes millimétriques et radar à ultrasons.
La solution modulaire de collecte de données basée sur la plate-forme PXI fournie par NI peut répondre à la collecte de données de plusieurs caméras, Ethernet du véhicule, CAN/CANFD, GPS, etc., et peut également répondre aux besoins de collecte de données de étapes successives. Par exemple, le contrôleur de domaine ADAS est essentiellement en phase de développement et d'itération. Vous pouvez utiliser l'équipement de test NI comme middleware pour collecter des données via la méthode de collecte de contournement de données, afin que le capteur ne soit pas détruit. . De plus, la solution de NI prend en charge des capacités de stockage de données allant de 15 To à 200 To.
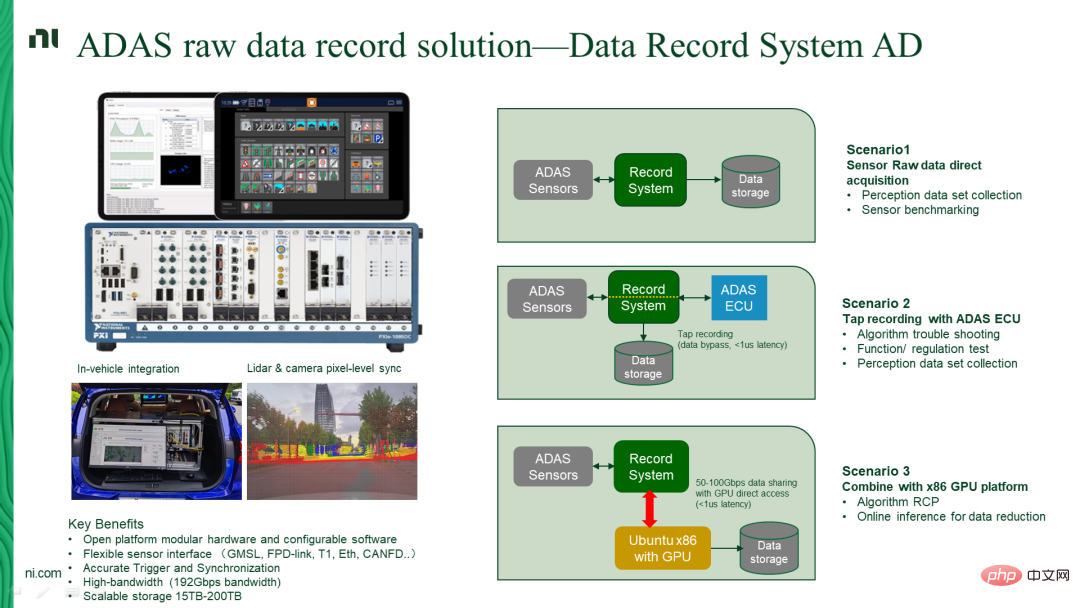
Afin de garantir l'exactitude des données collectées, le véhicule utilisé pour enregistrer les données doit être équipé de capteurs et de technologies de mesure qui répondent à son niveau spécifique de conduite intelligente. Les principaux types de capteurs comprennent les caméras, les radars à ondes millimétriques et les lidars. Au cœur du système se trouve le contrôleur de fusion, qui acquiert les données de tous les capteurs et calcule un modèle de l'environnement actuel en temps réel, qui est ensuite utilisé pour contrôler les systèmes de conduite, de direction et de freinage.
Un système d'acquisition de données haute performance qui répond aux besoins de divers capteurs, calculateurs et enregistrement de données de communication doit être spécialement conçu pour un fonctionnement continu, fournissant des dispositifs de stockage RAID très fiables capables de mesurer les données brutes des caméras, à ondes millimétriques. radar et lidar, avec le test du contrôleur de fusion comprend également des données vidéo de caméra de référence supplémentaires ainsi que des données du système de navigation inertielle qui fournissent la position précise du véhicule et du véhicule Ethernet, CAN, CANFD, FlexRay et de nombreuses autres données de bus.
2. Gestion du Big Data - DIAdem
En termes de processus, la gestion du Big Data est divisée en trois parties : la gestion de flotte, le centre de données et l'utilisation des données du terminal. Dans le processus de transmission des données du véhicule au centre de données, des méthodes de liaison telles que la migration des données sont couramment utilisées, et le volume de données peut atteindre 10 à 100 To/chaque véhicule/jour. À son tour, le centre de données peut également surveiller le véhicule en temps réel, ce qui se fait principalement via le réseau 4G ou 5G du véhicule.
Pour les véhicules à différents niveaux, la quantité de données à collecter a également augmenté de façon exponentielle. En prenant comme exemple l'étape L3 actuellement courante, avec l'introduction de caméras 4K ultra haute définition, d'un lidar à 128 lignes et d'autres capteurs, la quantité de données enregistrées par le système de collecte de données pendant 8 heures par jour atteint 30 To. .
Le système d'acquisition doit fournir une bande passante élevée et un stockage de données de grande capacité, et il doit également réfléchir à la manière de transmettre les données au centre de données de manière simple. Par exemple, les données sont transmises à un centre de données d'une capacité de PB via une machine de téléchargement de données dédiée.
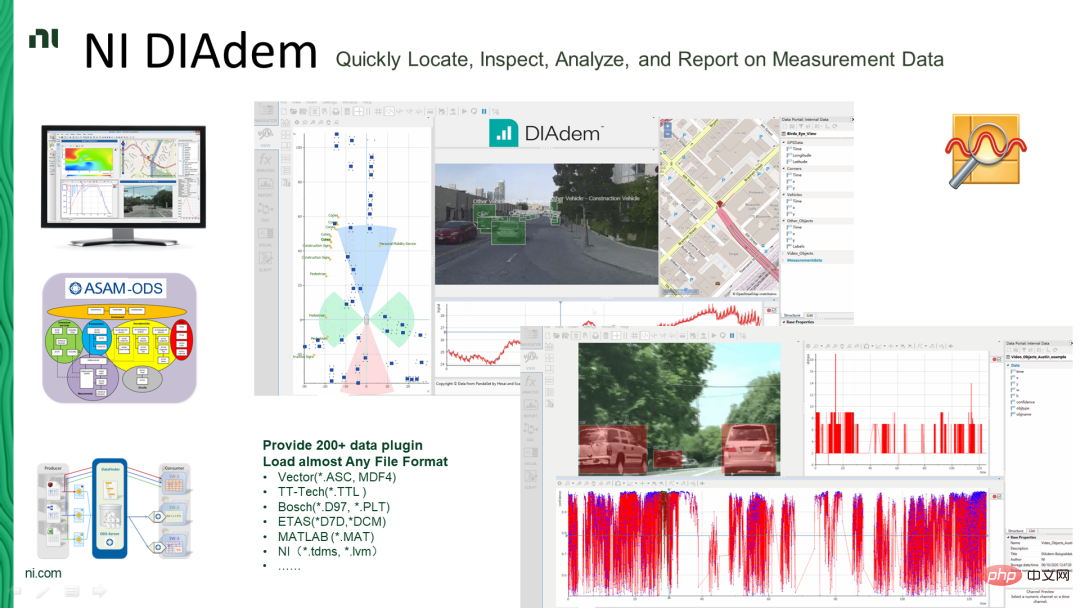
En plus de ces outils basés sur le cloud, voici un autre artefact d'exploration de données - DIAdem. Il peut être déployé dans le cloud pour mettre en œuvre la visualisation et l'exploration de données correspondantes pour les données d'essais routiers, les images de données multi-sources, les nuages de points et certaines données de bus. DIAdem peut fournir plus de 200 plug-ins de données et est compatible avec différents types de formats de données des fabricants de tests, tels que ASC, MDF4, TTL, MAT, etc.
3. Virtualisation de scène - monoDrive
Après avoir collecté des données via des essais routiers, il est nécessaire de nettoyer et de classer les données, de sélectionner des scènes et enfin de combiner des essais routiers réels et des tests de simulation virtuelle. monoDrive est un outil capable de réaliser une modélisation physique de capteur haute fidélité et une segmentation sémantique de scène. Il prend également en charge les fonctions de simulation dans le cloud et peut déployer un grand nombre de cas de test dans le cloud pour accélérer la progression de la simulation. Un autre avantage important de monoDrive est la fonctionnalité étendue de génération automatique de scènes virtuelles réelles.
Il convient de mentionner que pendant le processus de reconstruction de scène ou de modélisation de capteurs, NI peut étiqueter les données de capteurs réels et les données de capteurs virtuels en conséquence.
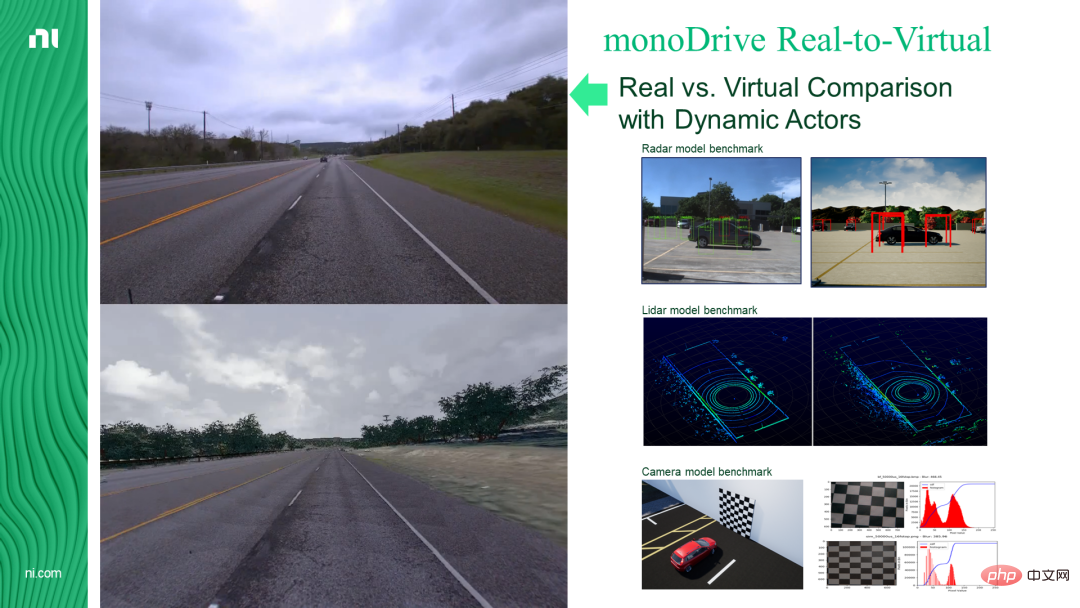
Un outil qui convertit les données réelles des véhicules en scénarios de simulation et met en œuvre un modèle de R&D basé sur les données et basé sur l'accumulation de grandes quantités de données réelles sur les véhicules.

▲ Collecte des effets de conversion de scène
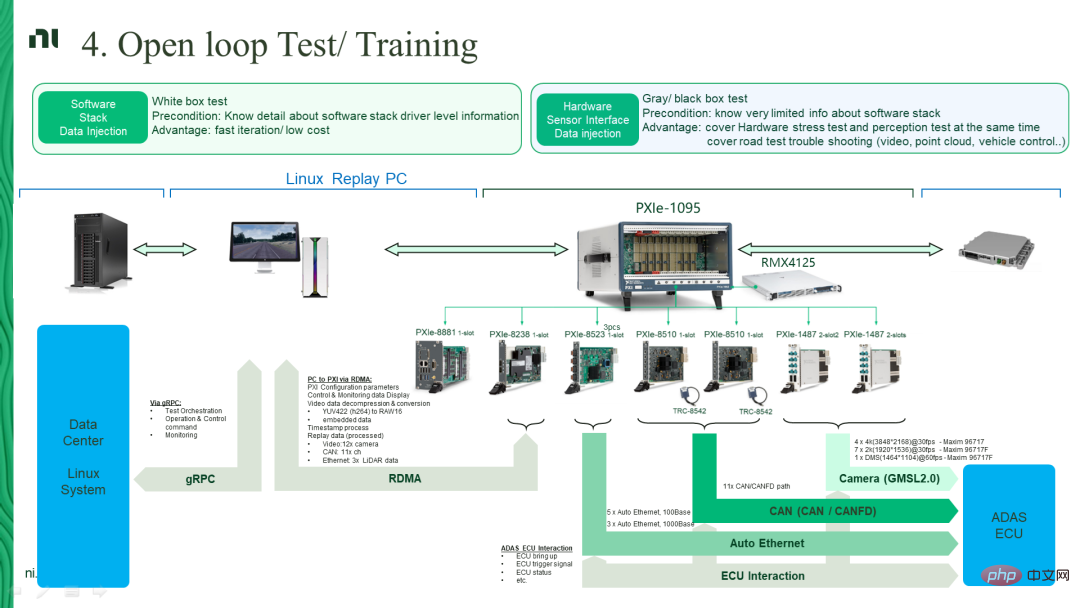
de déviation entre conception de cas et situation réelle De grandes questions rapprochent la simulation de la conduite autonome du monde réel. 4. Retour de données en boucle ouverte - architecture système basée sur la plateforme PXI
 Cette étape pour faire l'original les données sont réinjectées dans le logiciel de perception ADAS, et une partie est directement réinjectée dans la pile logicielle pour effectuer un retour logiciel, principalement pour la partie test de certains modèles. Une autre partie est directement renvoyée au calculateur réel, ce qui permet de reproduire de manière plus réaliste certaines des situations découvertes lors de l'essai routier.
Cette étape pour faire l'original les données sont réinjectées dans le logiciel de perception ADAS, et une partie est directement réinjectée dans la pile logicielle pour effectuer un retour logiciel, principalement pour la partie test de certains modèles. Une autre partie est directement renvoyée au calculateur réel, ce qui permet de reproduire de manière plus réaliste certaines des situations découvertes lors de l'essai routier.
La composition de l'architecture système NI : centre de données utilisateur, Replay PC basé sur plateforme Linux, plateforme NI PXI
Afin de former une boucle fermée de données et d'utiliser pleinement les valeur des données brutes, de plus en plus De plus en plus de constructeurs automobiles construisent un tel système de retour de données en cluster. Lorsque de nombreux constructeurs automobiles définissent la fonction AEB, ils exigent généralement que la fonction AEB ne se déclenche pas faussement sur 100 000 kilomètres ou 200 000 kilomètres.
Donnez-moi un exemple -
Si vous courez 80 000 kilomètres lors de l'essai routier et que soudain un faux déclenchement se produit, vous devrez revenir en arrière et modifier le logiciel correspondant. Après avoir modifié le logiciel, dois-je encore parcourir 100 000 kilomètres ? Évidemment, recommencer serait une perte de temps et d’expérience. Face à un tel défi, quelles sont les méthodes efficaces ?
Wang Shuai a expliqué : « Si un problème survient lors du premier essai routier à 80 000 kilomètres, nous pouvons nous assurer que les données de kilométrage précédentes sont enregistrées. Ensuite, une fois le problème découvert, nous modifions itérativement le logiciel. Après avoir modifié le logiciel, nous utilisons les données originales collectées pour effectuer un test de régression afin de tester si le logiciel peut fonctionner normalement sur les données originales. Cela réduit notre besoin d'investissement sur route, accélérant ainsi le développement »
5. Fermé-. tests en boucle – SIL et HIL
Les tests en boucle fermée incluent généralement le logiciel dans la boucle (SIL) et le matériel dans la boucle (HIL). En termes de logiciel dans la boucle, la solution de NI consiste à utiliser la plateforme monoDrive pour fournir un environnement pouvant être déployé par lots sur le cloud. En termes de matériel dans la boucle, la solution de NI consiste à utiliser la plate-forme PXI et les avantages de NI en matière de caméras, de bus de véhicules et de synchronisation de données pour mettre en œuvre un système en boucle fermée avec des fonctions d'injection de données pour plusieurs types de capteurs.
Ce qui précède est le contenu détaillé de. pour plus d'informations, suivez d'autres articles connexes sur le site Web de PHP en chinois!
Articles Liés
Voir plus- Tendances technologiques à surveiller en 2023
- Comment l'intelligence artificielle apporte un nouveau travail quotidien aux équipes des centres de données
- L'intelligence artificielle ou l'automatisation peuvent-elles résoudre le problème de la faible efficacité énergétique des bâtiments ?
- Co-fondateur d'OpenAI interviewé par Huang Renxun : les capacités de raisonnement de GPT-4 n'ont pas encore atteint les attentes
- Bing de Microsoft surpasse Google en termes de trafic de recherche grâce à la technologie OpenAI