
Maison >développement back-end >Tutoriel Python >Cool, Python réalise la visualisation des données de trafic !
Cool, Python réalise la visualisation des données de trafic !

- WBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBavant
- 2023-04-11 19:52:042251parcourir

1. Introduction à TransBigData
TransBigData fournit une méthode rapide et concise pour traiter les mégadonnées spatio-temporelles de trafic courantes (telles que les données GPS des taxis, les données partagées des vélos et les données GPS des bus, etc.). TransBigData fournit une variété de méthodes de traitement pour chaque étape de l'analyse des mégadonnées spatio-temporelles du trafic. Le code est concis, efficace, flexible et facile à utiliser. Des tâches de données complexes peuvent être mises en œuvre avec un code concis.
Actuellement, TransBigData fournit principalement les méthodes suivantes :
- Prétraitement des données : fournit des méthodes pour calculer rapidement des informations de base telles que le volume de données, la période de temps, l'intervalle d'échantillonnage, etc. pour les ensembles de données, et fournit également les méthodes de nettoyage correspondantes pour diverses données. des bruits.
- Rastérisation des données : fournit un système de méthode pour générer et faire correspondre plusieurs types de rasters géographiques (rasters rectangulaires, triangulaires, hexagonaux et géohash) dans la zone d'étude, qui peut rapidement convertir algorithmiquement des points spatiaux de manière vectorisée. Les données sont cartographiées sur un trame géographique.
- Visualisation des données : basé sur le package de visualisation keplergl, vous pouvez afficher les données de manière interactive et visuelle sur Jupyter Notebook avec un code simple.
- Traitement de trajectoire : générez des types de lignes de trajectoire à partir des points GPS des données de trajectoire, densifiez et clairsemez les points de trajectoire, etc.
- Fond de carte, conversion de coordonnées et calcul : chargez et affichez la conversion de coordonnées entre le fond de carte et divers systèmes de coordonnées spéciaux.
- Méthodes de traitement spécifiques : fournir des méthodes de traitement correspondantes pour diverses données spécifiques, telles que l'extraction des points de départ et d'arrivée des commandes à partir des données GPS des taxis, l'identification de la résidence et du lieu de travail à partir des données de signalisation des téléphones portables, et la construction d'une topologie de réseau à partir des données SIG du réseau de métro et le calcul. le chemin le plus court, etc.
TransBigData peut être installé via pip ou conda. Exécutez le code suivant dans l'invite de commande pour installer :
pip install -U transbigdata
Une fois l'installation terminée, exécutez le code suivant en Python pour importer le package TransBigData.
import transbigdata as tbd
2. Prétraitement des données
TransBigData peut être connecté de manière transparente aux packages Pandas et GeoPandas couramment utilisés dans le traitement des données. Tout d'abord, nous introduisons le package Pandas et lisons les données GPS du taxi :
import pandas as pd
# 读取数据
data = pd.read_csv('TaxiData-Sample.csv',header = None)
data.columns = ['VehicleNum','time','lon','lat','OpenStatus','Speed']
data.head()Les résultats sont présentés dans la figure 2 :

▲ Figure 2 Données GPS du taxi
Ensuite, introduisons le package GeoPandas pour lire les informations régionales de la portée de la recherche Et montrer :
import geopandas as gpd # 读取研究范围区域信息 sz = gpd.read_file(r'sz/sz.shp') sz.plot()
Les résultats sont présentés dans la Figure 3 :
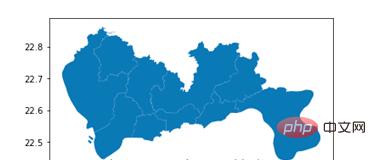
▲ Figure 3 Informations régionales sur la portée de la recherche
Le package TransBigData intègre certaines méthodes de prétraitement courantes pour les données spatio-temporelles du trafic. Parmi elles, la méthode tbd.clean_outofshape saisit les données et les informations sur la zone de recherche et peut éliminer les données en dehors du champ de recherche. La méthode tbd.clean_taxi_status peut éliminer les enregistrements de changements instantanés du statut des passagers dans les données GPS des taxis. Lorsque vous utilisez la méthode de prétraitement, vous devez transmettre les noms de colonnes correspondant aux colonnes d'informations importantes dans le tableau de données. Le code est le suivant :
# 数据预处理 #剔除研究范围外的数据,计算原理是在方法中先栅格化后栅格匹配研究范围后实现对应。因此这里需要同时定义栅格大小,越小则精度越高 data = tbd.clean_outofshape(data, sz, col=['lon', 'lat'], accuracy=500) # 剔除出租车数据中载客状态瞬间变化的数据 data = tbd.clean_taxi_status(data, col=['VehicleNum', 'time', 'OpenStatus'])
Après avoir traité le code ci-dessus, nous avons combiné les données en dehors de la recherche. la portée des données GPS du taxi avec les données sur les changements instantanés du statut des passagers sera éliminée.
3. Rastérisation des données
Le format raster (grilles de même taille dans l'espace géographique) est le moyen le plus basique d'exprimer la distribution des données. Une fois les données GPS rastérisées, chaque point de données contient le raster où il se trouve. Lorsque le raster est utilisé pour exprimer la distribution des données, la distribution qu'il représente est proche de la situation réelle.
L'outil TransBigData nous fournit un système de traitement raster complet, rapide et pratique. Lorsque vous utilisez TransBigData pour la division raster, vous devez d'abord déterminer les paramètres de rastérisation (qui peuvent être compris comme définissant un système de coordonnées raster). Les paramètres peuvent nous aider à rastériser rapidement :
# 定义研究范围边界 bounds = [113.75, 22.4,114.62, 22.86] # 通过边界获取栅格化参数 params = tbd.area_to_params(bounds,accuracy = 1000) params
Sortie :
{'slon': 113.75,
'slat': 22.4,
'deltalon': 0.00974336289289822,
'deltalat': 0.008993210412845813,
'theta': 0,
'method': 'rect',
'gridsize': 1000} Le contenu. du paramètre de rastérisation params sorti à ce moment stocke les coordonnées d'origine du système de coordonnées raster (slon, slat), la longitude et la latitude, la longueur et la largeur d'un seul raster (deltalon, deltalat), l'angle de rotation du raster (thêta) , le raster La forme de la grille (le paramètre de méthode, dont la valeur peut être un carré rect, un triangle tri et un hexagone hexa) et la taille de la grille (le paramètre gridsize, en mètres).
Après avoir obtenu les paramètres de rastérisation, nous pouvons utiliser les méthodes fournies dans TransBigData pour effectuer des opérations telles que la correspondance raster et la génération sur les données GPS.
Le système complet de méthode de traitement raster est illustré dans la figure 4 :
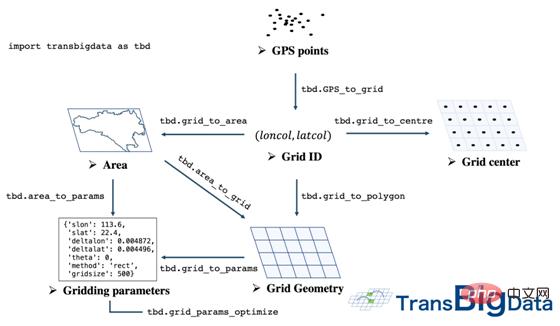
▲ Figure 4 Le système de traitement raster fourni par TransBigData
En utilisant la méthode tbd.GPS_to_grid, vous pouvez générer des points GPS pour chaque taxi. Cette méthode Les colonnes numérotées. LONCOL et LATCOL seront générés, et ces deux colonnes précisent conjointement le raster :
# 将GPS数据对应至栅格,将生成的栅格编号列赋值到数据表上作为新的两列 data['LONCOL'],data['LATCOL']= tbd.GPS_to_grids(data['lon'],data['lat'],params)
下一步,聚合集计每一栅格内的数据量,并为栅格生成地理几何图形,构建GeoDataFrame:
# 聚合集计栅格内数据量 grid_agg=data.groupby(['LONCOL','LATCOL'])['VehicleNum'].count().reset_index() # 生成栅格的几何图形 grid_agg['geometry']=tbd.grid_to_polygon([grid_agg['LONCOL'],grid_agg['LATCOL']],params) # 转换为GeoDataFrame grid_agg=gpd.GeoDataFrame(grid_agg) # 绘制栅格 grid_agg.plot(column = 'VehicleNum',cmap = 'autumn_r')
结果如图5所示:
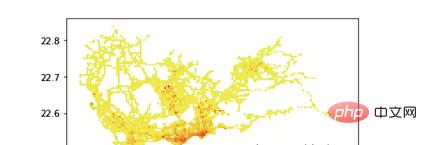
▲图5 数据栅格化的结果
对于一个正式的数据可视化图来说,我们还需要添加底图、色条、指北针和比例尺。TransBigData也提供了相应的功能,代码如下:
import matplotlib.pyplot as plt
fig =plt.figure(1,(8,8),dpi=300)
ax =plt.subplot(111)
plt.sca(ax)
# 添加行政区划边界作为底图
sz.plot(ax=ax,edgecolor=(0,0,0,0),facecolor=(0,0,0,0.1),linewidths=0.5)
# 定义色条位置
cax = plt.axes([0.04, 0.33, 0.02, 0.3])
plt.title('Data count')
plt.sca(ax)
# 绘制数据
grid_agg.plot(column = 'VehicleNum',cmap = 'autumn_r',ax = ax,cax = cax,legend = True)
# 添加指北针和比例尺
tbd.plotscale(ax,bounds = bounds,textsize = 10,compasssize = 1,accuracy = 2000,rect = [0.06,0.03],zorder = 10)
plt.axis('off')
plt.xlim(bounds[0],bounds[2])
plt.ylim(bounds[1],bounds[3])
plt.show()结果如图6所示:
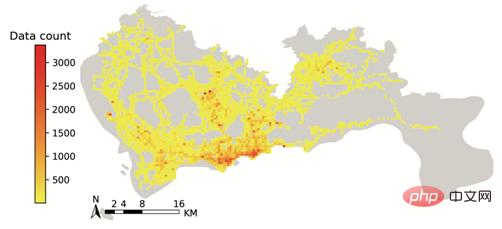
▲图6 tbd包绘制的出租车GPS数据分布
4、订单起讫点OD提取与聚合集计
针对出租车GPS数据,TransBigData提供了直接从数据中提取出出租车订单起讫点(OD)信息的方法,代码如下:
# 从GPS数据提取OD oddat=tbd.taxigps_to_od(data,col=['VehicleNum','time','Lng','Lat','OpenStatus']) oddata
结果如图7所示:
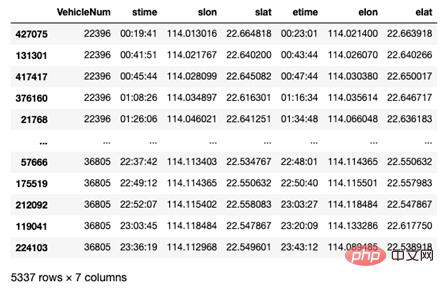
▲图7 tbd包提取的出租车OD
TransBigData包提供的栅格化方法可以让我们快速地进行栅格化定义,只需要修改accuracy参数,即可快速定义不同大小粒度的栅格。我们重新定义一个2km*2km的栅格坐标系,将其参数传入tbd.odagg_grid方法对OD进行栅格化聚合集计并生成GeoDataFrame:
# 重新定义栅格,获取栅格化参数 params=tbd.area_to_params(bounds,accuracy = 2000) # 栅格化OD并集计 od_gdf=tbd.odagg_grid(oddata,params) od_gdf.plot(column = 'count')
结果如图8所示:
▲图8 tbd集计的栅格OD
添加地图底图,色条与比例尺指北针:
# 创建图框
import matplotlib.pyplot as plt
fig =plt.figure(1,(8,8),dpi=300)
ax =plt.subplot(111)
plt.sca(ax)
# 添加行政区划边界作为底图
sz.plot(ax=ax,edgecolor=(0,0,0,1),facecolor=(0,0,0,0),linewidths=0.5)
# 绘制colorbar
cax=plt.axes([0.05, 0.33, 0.02, 0.3])
plt.title('Data count')
plt.sca(ax)
# 绘制OD
od_gdf.plot(ax = ax,column = 'count',cmap = 'Blues_r',linewidth = 0.5,vmax = 10,cax = cax,legend = True)
# 添加比例尺和指北针
tbd.plotscale(ax,bounds=bounds,textsize=10,compasssize=1,accuracy=2000,rect = [0.06,0.03],zorder = 10)
plt.axis('off')
plt.xlim(bounds[0],bounds[2])
plt.ylim(bounds[1],bounds[3])
plt.show()结果如图9所示:
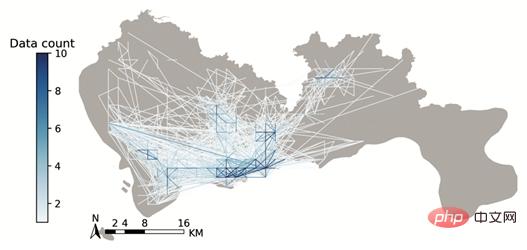
▲ 图9 TransBigData绘制的栅格OD数据
同时,TransBigData包也提供了将OD直接聚合集计到区域间的方法:
# OD集计到区域 # 方法1:在不传入栅格化参数时,直接用经纬度匹配 od_gdf = tbd.odagg_shape(oddata,sz,round_accuracy=6) # 方法2:传入栅格化参数时,程序会先栅格化后匹配以加快运算速度,数据量大时建议使用 od_gdf = tbd.odagg_shape(oddata,sz,params = params) od_gdf.plot(column = 'count')
结果如图10所示:
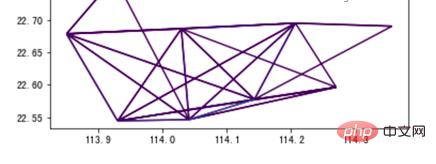
▲图10 tbd集计的小区OD
加载地图底图并调整出图参数:
# 创建图框
import matplotlib.pyplot as plt
import plot_map
fig =plt.figure(1,(8,8),dpi=300)
ax =plt.subplot(111)
plt.sca(ax)
# 添加行政区划边界作为底图
sz.plot(ax = ax,edgecolor = (0,0,0,0),facecolor = (0,0,0,0.2),linewidths=0.5)
# 绘制colorbar
cax = plt.axes([0.05, 0.33, 0.02, 0.3])
plt.title('count')
plt.sca(ax)
# 绘制OD
od_gdf.plot(ax = ax,vmax = 100,column = 'count',cax = cax,cmap = 'autumn_r',linewidth = 1,legend = True)
# 添加比例尺和指北针
tbd.plotscale(ax,bounds = bounds,textsize = 10,compasssize = 1,accuracy = 2000,rect = [0.06,0.03],zorder = 10)
plt.axis('off')
plt.xlim(bounds[0],bounds[2])
plt.ylim(bounds[1],bounds[3])
plt.show()结果如图11所示:

▲ 图11区域间OD可视化结果
5、交互可视化
在TransBigData中,我们可以对出租车数据使用简单的代码在jupyter notebook中快速进行交互可视化。这些可视化方法底层依托了keplergl包,可视化的结果不再是静态的图片,而是能够与鼠标响应交互的地图应用。
tbd.visualization_data方法可以实现数据分布的可视化,将数据传入该方法后,TransBigData会首先对数据点进行栅格集计,然后生成数据的栅格,并将数据量映射至颜色上。代码如下:
结果如图12所示:
# 可视化数据点分布 tbd.visualization_data(data,col = ['lon','lat'],accuracy=1000,height = 500)
▲ 图12数据分布的栅格可视化
对于出租车数据中所提取出的出行OD,也可使用tbd.visualization_od方法实现OD的弧线可视化。该方法也会对OD数据进行栅格聚合集计,生成OD弧线,并将不同大小的OD出行量映射至不同颜色。代码如下:
# 可视化数据点分布 tbd.visualization_od(oddata,accuracy=2000,height = 500)
结果如图13所示:
▲ 图13 OD分布的弧线可视化
对个体级的连续追踪数据,tbd.visualization_trip方法可以将数据点处理为带有时间戳的轨迹信息并动态地展示,代码如下:
# 动态可视化轨迹 tbd.visualization_trip(data,col = ['lon','lat','VehicleNum','time'],height = 500)
结果图14所示。点击其中的播放键,可以看到出租车运行的动态轨迹效果。
Ce qui précède est le contenu détaillé de. pour plus d'informations, suivez d'autres articles connexes sur le site Web de PHP en chinois!