
Maison >Périphériques technologiques >IA >Prédiction de contrôle pour le guidage de trajectoire en conduite autonome de bout en bout : une méthode de base simple et puissante TCP
Prédiction de contrôle pour le guidage de trajectoire en conduite autonome de bout en bout : une méthode de base simple et puissante TCP

- WBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBavant
- 2023-04-10 09:01:082175parcourir
Article arXiv « Prédiction de contrôle guidé par trajectoire pour la conduite autonome de bout en bout : une ligne de base simple mais solide », juin 2022, Laboratoire d'IA de Shanghai et Université Jiao Tong de Shanghai.
Les méthodes de conduite autonome de bout en bout actuelles exécutent des contrôleurs en fonction de trajectoires planifiées ou effectuent directement des prédictions de contrôle, ce qui couvre deux domaines de recherche. Compte tenu des avantages mutuels potentiels entre les deux, cet article explore activement la combinaison des deux, appelée TCP (Trajectory-guided Control Prediction). Plus précisément, la méthode d'ensemble comporte deux branches, respectivement pour la planification de trajectoire et le contrôle direct. La branche trajectoire prédit les trajectoires futures, tandis que la branche contrôle implique un nouveau schéma de prédiction en plusieurs étapes raisonnant sur la relation entre les actions actuelles et les états futurs. Les deux branches sont connectées de manière à ce que la branche de contrôle reçoive un guidage correspondant de la branche de trajectoire à chaque pas de temps. Les sorties des deux branches sont ensuite fusionnées pour obtenir des avantages complémentaires.
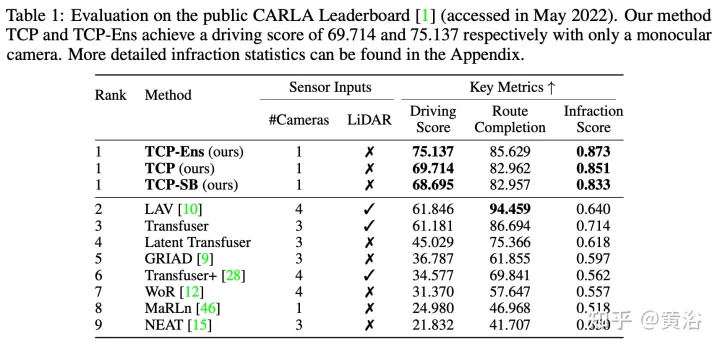
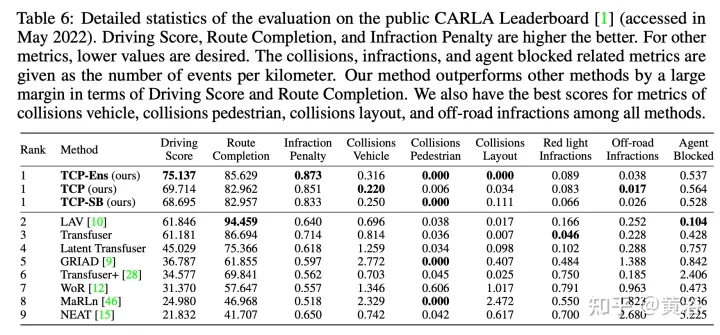
Évaluez l'utilisation du simulateur Carla dans un environnement de conduite urbaine en boucle fermée avec des scénarios difficiles. Même avec une entrée de caméra monoculaire, cette méthode occupe la première place dans le classement officiel CARLA. Le code source et les données seront open source : https://github.com/OpenPerceptionX/TCP
Select Roach ("Conduite urbaine de bout en bout en imitant un coach d'apprentissage par renforcement ". ICCV, 2021) en tant qu'experts. Roach est un modèle simple formé par RL avec des informations privilégiées comprenant les routes, les voies, les itinéraires, les véhicules, les piétons, les feux de circulation et les gares, le tout rendu sous forme d'images BEV 2D. Par rapport aux experts formés à la main, ces experts basés sur l'apprentissage peuvent transmettre plus d'informations en plus des signaux de supervision directs. Plus précisément, il y a une perte de fonctionnalités, qui oblige les fonctionnalités latentes avant la tête de sortie finale du modèle étudiant à être similaires à celles des experts. Une perte de valeur est également ajoutée en tant que tâche auxiliaire du modèle d'étudiant pour prédire les rendements attendus.
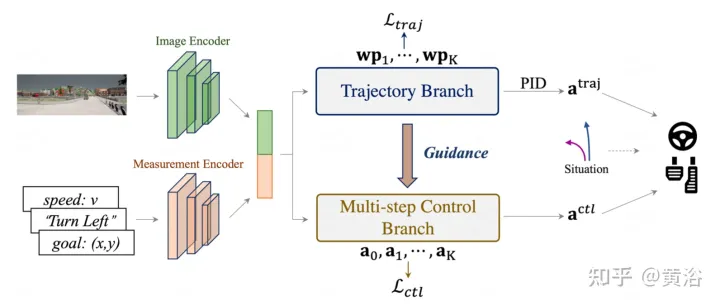
Comme le montre la figure, l'architecture entière se compose d'une étape de codage d'entrée et de deux branches suivantes : l'image d'entrée i passe par un encodeur d'image basé sur CNN, tel que ResNet, pour générer une carte de caractéristiques F. Dans le même temps, les informations de navigation g sont concaténées avec la vitesse actuelle v pour former l'entrée de mesure m, puis le codeur de mesure basé sur MLP prend m comme entrée et génère la caractéristique de mesure jm. Les fonctionnalités d'encodage sont ensuite partagées par les deux branches pour les prédictions ultérieures de trajectoire et de contrôle . Plus précisément, la branche de contrôle est une nouvelle conception de prédiction en plusieurs étapes avec les conseils de la branche de trajectoire. Enfin, un schéma de fusion basé sur des scénarios est adopté pour combiner le meilleur des deux paradigmes de sortie.
Comme le montre la figure, TCP demande l'aide de la branche de planification de trajectoire en apprenant la carte d'attention pour extraire des informations importantes de la carte de caractéristiques encodée. L'interaction entre les deux branches (trajectoire et contrôle) améliore la cohérence de ces deux paradigmes de sortie étroitement liés et élabore davantage l'esprit de l'apprentissage multitâche (MTL). Plus précisément, le codeur d'image F est utilisé pour extraire la carte de caractéristiques 2D au pas de temps t, et les états cachés correspondants de la branche de contrôle et de la branche de trajectoire sont utilisés pour calculer la carte d'attention.
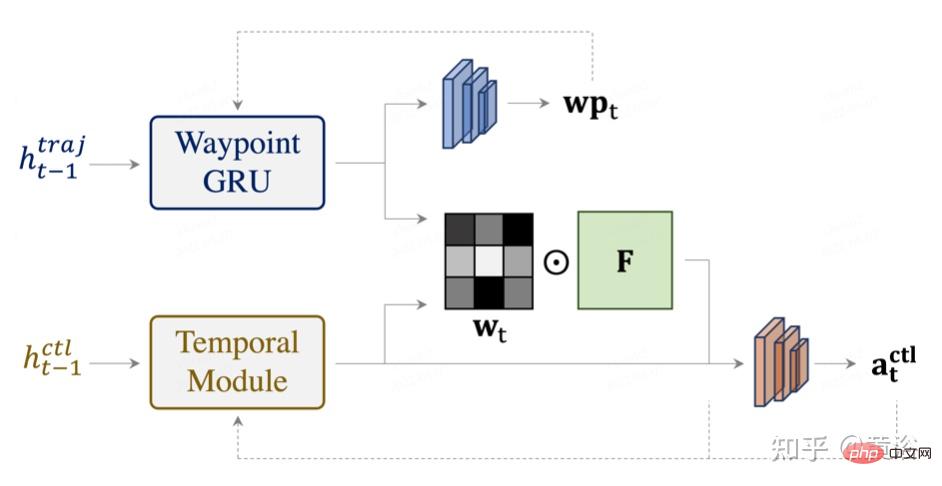
Les caractéristiques de représentation des informations sont saisies dans l'en-tête de la politique, qui est partagée entre toutes les étapes de temps t pour prédire les actions de contrôle correspondantes. Notez que pour l'étape initiale, seules les caractéristiques mesurées sont utilisées pour calculer la carte d'attention initiale, et les caractéristiques de l'image d'attention sont combinées avec les caractéristiques mesurées pour former un vecteur de caractéristiques initial. Pour garantir que les caractéristiques décrivent bien l'état de cette étape et contiennent des informations importantes pour contrôler les prédictions, une perte de caractéristiques est ajoutée à chaque étape afin que les vecteurs de caractéristiques initiaux soient également proches des caractéristiques de l'expert.
Le framework TCP a deux formes de représentation des résultats : la trajectoire de planification et le contrôle prédictif. Pour une combinaison plus poussée, une stratégie de fusion basée sur des scénarios est conçue, comme le montre le pseudocode de l'algorithme 1.
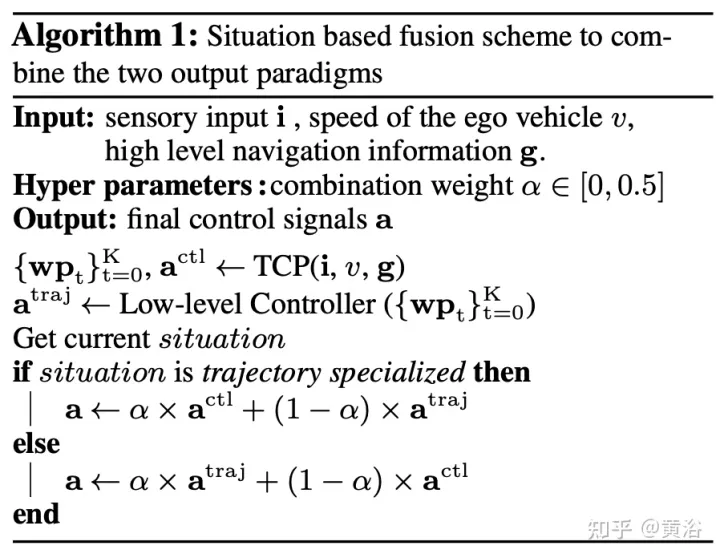
Plus précisément, α est représenté comme un poids combiné, avec une valeur comprise entre 0 et 0,5. Selon la croyance antérieure, dans certains cas, une représentation est plus appropriée. En faisant la moyenne du poids α, les prédictions de trajectoire et de contrôle sont combinées. , et le plus approprié occupe plus de poids (1 − α). Notez que le poids combiné α n'a pas besoin d'être constant ou symétrique, ce qui signifie qu'il peut être défini sur différentes valeurs dans différentes situations ou pour des signaux de commande spécifiques. Dans l'expérience, la scène a été sélectionnée en fonction du fait que le véhicule autonome tournait, ce qui signifie que s'il tournait, la scène était spécifique au contrôle, sinon elle était spécifique à la trajectoire.
Les résultats expérimentaux sont les suivants :
Ce qui précède est le contenu détaillé de. pour plus d'informations, suivez d'autres articles connexes sur le site Web de PHP en chinois!
Articles Liés
Voir plus- Tendances technologiques à surveiller en 2023
- Comment l'intelligence artificielle apporte un nouveau travail quotidien aux équipes des centres de données
- L'intelligence artificielle ou l'automatisation peuvent-elles résoudre le problème de la faible efficacité énergétique des bâtiments ?
- Co-fondateur d'OpenAI interviewé par Huang Renxun : les capacités de raisonnement de GPT-4 n'ont pas encore atteint les attentes
- Bing de Microsoft surpasse Google en termes de trafic de recherche grâce à la technologie OpenAI