
Maison >Périphériques technologiques >IA >Présentation : Technologie de détection collaborative pour la conduite autonome
Présentation : Technologie de détection collaborative pour la conduite autonome

- WBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBavant
- 2023-04-08 15:01:091471parcourir
Article de synthèse arXiv « Collaborative Perception for Autonomous Driving : Current Status and Future Trend », 23 août 2022, Université Jiao Tong de Shanghai.
La perception est l'un des modules clés du système de conduite autonome. Cependant, les capacités limitées des vélos créent un goulot d'étranglement pour améliorer les performances de perception. Afin de briser les limites de la perception unique, une perception collaborative est proposée pour permettre aux véhicules de partager des informations et de percevoir l'environnement en dehors de la ligne de vue et en dehors du champ de vision. Cet article passe en revue les travaux prometteurs liés à la technologie de détection collaborative, y compris les concepts de base, les modèles collaboratifs ainsi que les éléments et applications clés. Enfin, les défis et les problèmes ouverts dans ce domaine de recherche sont discutés et d'autres orientations sont données.
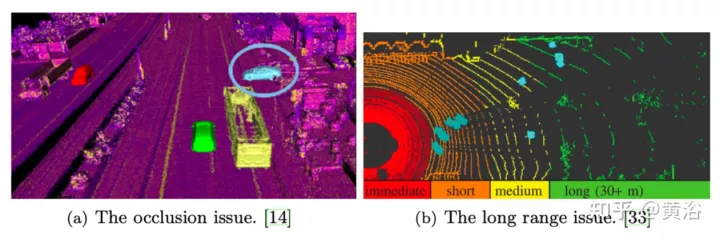
Comme le montre la figure, deux problèmes importants liés à la perception unique sont l'occlusion à longue portée et la rareté des données. La solution à ces problèmes est que les véhicules situés dans la même zone partagent entre eux des informations de perception communes (CPM, message de perception collective) et perçoivent l'environnement de manière collaborative, ce que l'on appelle détection collaborative ou détection coopérative.
Grâce à la construction d'infrastructures de communication et au développement de technologies de communication telles que V2X, les véhicules peuvent échanger des informations de manière fiable, réalisant ainsi une collaboration. Des travaux récents ont montré que la détection collaborative entre véhicules peut améliorer la précision de la perception environnementale ainsi que la robustesse et la sécurité des systèmes de transport.
De plus, les véhicules autonomes sont souvent équipés de capteurs haute fidélité pour une perception fiable, ce qui entraîne des coûts élevés. La détection collaborative peut alléger les exigences strictes d'un seul véhicule en matière d'équipement de détection.
La détection coopérative partage des informations avec les véhicules et les infrastructures à proximité, permettant aux véhicules autonomes de surmonter certaines limitations de perception telles que l'occlusion et le champ de vision court. Cependant, pour parvenir à une détection collaborative robuste et en temps réel, il faut résoudre certains problèmes liés à la capacité de communication et au bruit. Récemment, certains travaux ont étudié les stratégies de détection collaborative, notamment ce qu'est la collaboration, quand collaborer, comment collaborer, l'alignement des informations partagées, etc.
Semblable à la fusion, il existe 4 catégories de collaboration :
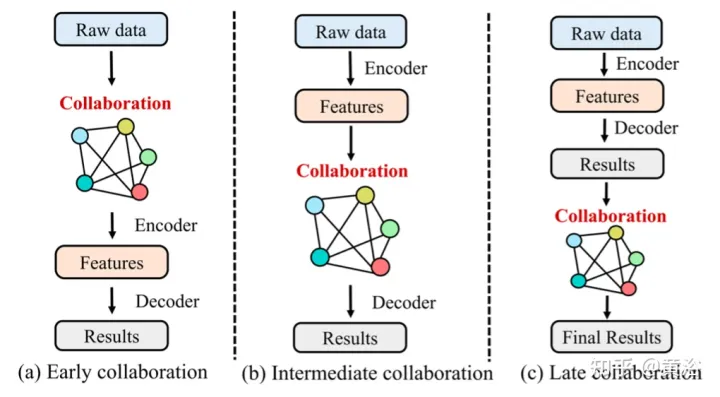
1 Collaboration précoce
La collaboration précoce collabore dans l'espace d'entrée, partageant des données sensorielles brutes entre les véhicules et l'infrastructure. Il regroupe les mesures brutes de tous les véhicules et infrastructures pour obtenir une vue globale. Par conséquent, chaque véhicule peut effectuer le traitement suivant et compléter la perception sur la base de la perspective globale, ce qui peut fondamentalement résoudre les problèmes d'occlusion et de longue distance qui surviennent dans la perception unique.
Cependant, le partage de données sensorielles brutes nécessite une communication étendue et encombre facilement le réseau de communication avec une charge de données excessive, ce qui entrave son application pratique dans la plupart des cas.
2. Collaboration tardive
La collaboration tardive collabore dans l'espace de sortie, ce qui favorise la fusion des résultats de perception produits par chaque agent et permet le raffinement.
Bien que la collaboration à un stade avancé soit économique en termes de bande passante, elle est très sensible aux erreurs de positionnement des agents et souffre d'erreurs d'estimation élevées et de bruit dus à des observations locales incomplètes.
3 Collaboration intermédiaire
La collaboration intermédiaire effectue une collaboration dans l'espace de fonctionnalités intermédiaire. Il est capable de transmettre des caractéristiques intermédiaires générées par des modèles de prédiction d'agents individuels. Après avoir fusionné ces caractéristiques, chaque agent décode les caractéristiques fusionnées et produit un résultat perceptuel. Conceptuellement, les informations représentatives peuvent être compressées dans ces fonctionnalités, économisant ainsi la bande passante de communication par rapport à une collaboration précoce et améliorant la perception par rapport à une collaboration tardive.
En pratique, la conception de cette stratégie collaborative est un défi algorithmique sous deux aspects : i) comment sélectionner les fonctionnalités les plus efficaces et les plus compactes à partir des mesures originales pour la transmission et ii) comment maximiser l'intégration d'autres renseignements. Les caractéristiques de le corps pour améliorer la capacité de perception de chaque corps intelligent.
4 Synergie Hybride
Comme mentionné ci-dessus, chaque mode de synergie a ses avantages et ses inconvénients. Par conséquent, certains travaux adoptent une collaboration hybride, combinant deux ou plusieurs modes de collaboration pour optimiser les stratégies de collaboration.
Les principaux facteurs de co-conscience comprennent :
1 Graphe de collaboration
Le graphe est un outil puissant pour la modélisation de co-conscience car il modélise des structures de données non euclidiennes avec une bonne interprétabilité. Dans certains travaux, les véhicules participant à la détection collaborative forment un graphe collaboratif complet, dans lequel chaque véhicule est un nœud et la relation collaborative entre deux véhicules est la limite entre les deux nœuds.
2 Pose Alignment
Étant donné que la détection collaborative nécessite la fusion de données provenant de véhicules et d'infrastructures situés à différents endroits et à différents moments, il est essentiel d'obtenir un alignement précis des données pour une collaboration réussie.
3 Fusion d'informations
La fusion d'informations est le composant central du système multi-agents, et son objectif est de fusionner la plus grande partie des informations provenant d'autres agents de manière efficace.
4 Allocation de ressources basée sur l'apprentissage par renforcement
La bande passante de communication limitée dans les environnements réels nécessite la pleine utilisation des ressources de communication disponibles, ce qui rend l'allocation des ressources et le partage du spectre très importants. Dans les environnements de communication véhiculaires, l'évolution rapide des conditions des canaux et la demande croissante de services rendent l'optimisation des problèmes d'allocation très complexe et difficile à résoudre à l'aide des méthodes d'optimisation traditionnelles. Certains travaux utilisent l'apprentissage par renforcement multi-agents (MARL) pour résoudre des problèmes d'optimisation.
Applications de la détection collaborative :
1 Détection de cibles 3D
La détection de cibles 3D basée sur un nuage de points lidar est le problème le plus préoccupant dans la recherche en détection collaborative. Les raisons sont les suivantes : i) Les nuages de points LiDAR ont plus de dimensions spatiales que les images et les vidéos. ii) Les nuages de points LiDAR peuvent conserver dans une certaine mesure des informations personnelles, telles que les visages et les numéros de plaque d'immatriculation. iii) Les données de nuages de points sont un type de données approprié pour la fusion car elles perdent moins de pixels lorsqu'elles sont alignées à partir de différentes poses. iv) La détection d'objets 3D est une tâche fondamentale pour la perception de la conduite autonome, sur laquelle reposent de nombreuses tâches telles que le suivi et la prédiction de mouvement.
2 Segmentation sémantique
La segmentation sémantique des scènes 3D est également une tâche clé requise pour la conduite autonome. Segmentation sémantique collaborative d'objets de scène 3D. À partir d'observations de scènes 3D (images, nuages de points lidar, etc.) provenant de plusieurs agents, un masque de segmentation sémantique est généré pour chaque agent.
Problèmes difficiles :
1 Robustesse de la communication
Une co-unification efficace repose sur une communication fiable entre les agents. Cependant, la communication n'est pas parfaite en pratique : i) à mesure que le nombre de véhicules dans le réseau augmente, la bande passante de communication disponible de chaque véhicule est limitée ii) en raison des inévitables retards de communication, il est difficile pour les véhicules de recevoir des informations en temps réel ; provenant d'autres véhicules ; iii) la communication peut parfois être interrompue, entraînant une interruption de la communication ; iv) la communication V2X est endommagée et des services fiables ne peuvent pas toujours être fournis ; Bien que les technologies de communication continuent de se développer et que la qualité des services de communication continue de s'améliorer, les problèmes ci-dessus persisteront pendant longtemps. Cependant, la plupart des travaux existants supposent que les informations peuvent être partagées en temps réel et sans perte. Il est donc très important de poursuivre les travaux afin de prendre en compte ces contraintes de communication et de concevoir des systèmes de détection collaboratifs robustes.
2 Hétérogénéité et multimodalité
La plupart des travaux de perception co-unifiée se concentrent sur la perception basée sur des nuages de points LiDAR. Cependant, il existe de nombreux autres types de données disponibles pour la détection, telles que des images et des nuages de points radar à ondes millimétriques. Il s’agit d’un moyen potentiel d’exploiter les données des capteurs multimodaux pour une collaboration plus efficace. De plus, dans certains scénarios, il existe différents niveaux de véhicules autonomes fournissant différentes qualités d’informations. Par conséquent, la manière de collaborer dans des réseaux de véhicules hétérogènes constitue un problème pour une application pratique ultérieure de la détection collaborative. Malheureusement, peu de travaux se concentrent sur la détection collaborative hétérogène et multimodale, ce qui constitue également un défi ouvert.
3 Ensembles de données à grande échelle
Le développement d'ensembles de données à grande échelle et de méthodes d'apprentissage en profondeur a amélioré les performances perceptuelles. Cependant, les ensembles de données existants dans le domaine de la recherche collaborative en matière de détection sont soit de petite taille, soit non accessibles au public.
Le manque d’ensembles de données publics à grande échelle entrave le développement ultérieur de la détection collaborative. De plus, la plupart des ensembles de données sont basés sur des simulations. Bien que la simulation soit un moyen économique et sûr de vérifier les algorithmes, des ensembles de données réelles sont également nécessaires pour appliquer la détection collaborative dans la pratique.
Ce qui précède est le contenu détaillé de. pour plus d'informations, suivez d'autres articles connexes sur le site Web de PHP en chinois!
Articles Liés
Voir plus- Tendances technologiques à surveiller en 2023
- Comment l'intelligence artificielle apporte un nouveau travail quotidien aux équipes des centres de données
- L'intelligence artificielle ou l'automatisation peuvent-elles résoudre le problème de la faible efficacité énergétique des bâtiments ?
- Co-fondateur d'OpenAI interviewé par Huang Renxun : les capacités de raisonnement de GPT-4 n'ont pas encore atteint les attentes
- Bing de Microsoft surpasse Google en termes de trafic de recherche grâce à la technologie OpenAI