



概述 之前的文章SURF和SIFT算子实现特征点检测简单地讲了利用SIFT和SURF算子检测特征点,在检测的基础上可以使用SIFT和SURF算子对特征点进行特征提取并使用匹配函数进行特征点的匹配。具体实现是首先采用SurfFeatureDetector检测特征点,再使用SurfDescripto
概述
之前的文章SURF和SIFT算子实现特征点检测简单地讲了利用SIFT和SURF算子检测特征点,在检测的基础上可以使用SIFT和SURF算子对特征点进行特征提取并使用匹配函数进行特征点的匹配。具体实现是首先采用SurfFeatureDetector检测特征点,再使用SurfDescriptorExtractor计算特征点的特征向量,最后采用BruteForceMatcher暴力匹配法或者FlannBasedMatcher选择性匹配法(二者的不同)来进行特征点匹配。
实验所用环境是opencv2.4.0+vs2008+win7,需要注意opencv2.4.X版本中SurfFeatureDetector是包含在opencv2/nonfree/features2d.hpp中,BruteForceMatcher是包含在opencv2/legacy/legacy.hpp中,FlannBasedMatcher是包含在opencv2/features2d/features2d.hpp中。
BruteForce匹配法
首先使用BruteForceMatcher暴力匹配法,代码如下:
/**
* @采用SURF算子检测特征点,对特征点进行特征提取,并使用BruteForce匹配法进行特征点的匹配
* @SurfFeatureDetector + SurfDescriptorExtractor + BruteForceMatcher
* @author holybin
*/
#include <stdio.h>
#include <iostream>
#include "opencv2/core/core.hpp"
#include "opencv2/nonfree/features2d.hpp" //SurfFeatureDetector实际在该头文件中
#include "opencv2/legacy/legacy.hpp" //BruteForceMatcher实际在该头文件中
//#include "opencv2/features2d/features2d.hpp" //FlannBasedMatcher实际在该头文件中
#include "opencv2/highgui/highgui.hpp"
using namespace cv;
using namespace std;
int main( int argc, char** argv )
{
Mat src_1 = imread( "D:\\opencv_pic\\cat3d120.jpg", CV_LOAD_IMAGE_GRAYSCALE );
Mat src_2 = imread( "D:\\opencv_pic\\cat0.jpg", CV_LOAD_IMAGE_GRAYSCALE );
if( !src_1.data || !src_2.data )
{
cout keypoints_1, keypoints_2;
detector.detect( src_1, keypoints_1 );
detector.detect( src_2, keypoints_2 );
cout > matcher;
vector matches;
matcher.match( descriptors_1, descriptors_2, matches );
cout<br>
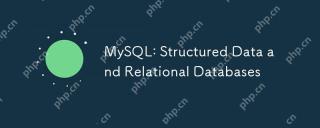
<p>实验结果:</p>
<img src="/static/imghwm/default1.png" data-src="/inc/test.jsp?url=http%3A%2F%2Fimg.blog.csdn.net%2F20141115151204375%3Fwatermark%2F2%2Ftext%2FaHR0cDovL2Jsb2cuY3Nkbi5uZXQvaG9seWJpbg%3D%3D%2Ffont%2F5a6L5L2T%2Ffontsize%2F400%2Ffill%2FI0JBQkFCMA%3D%3D%2Fdissolve%2F70%2Fgravity%2FSouthEast&refer=http%3A%2F%2Fblog.csdn.net%2Fu012564690%2Farticle%2Fdetails%2F17370511" class="lazy" alt="OpenCV中feature2D学习SIFT和SURF算子实现特征点提取与匹配" ><br>
<p><span><br>
</span></p>
<h1 id="span-FLANN匹配法-span"><span>FLANN匹配法</span></h1>
<p>使用暴力匹配的结果不怎么好,下面使用FlannBasedMatcher进行特征匹配,只保留好的特征匹配点,代码如下:</p>
<pre class="brush:php;toolbar:false">/**
* @采用SURF算子检测特征点,对特征点进行特征提取,并使用FLANN匹配法进行特征点的匹配
* @SurfFeatureDetector + SurfDescriptorExtractor + FlannBasedMatcher
* @author holybin
*/
#include <stdio.h>
#include <iostream>
#include "opencv2/core/core.hpp"
#include "opencv2/nonfree/features2d.hpp" //SurfFeatureDetector实际在该头文件中
//#include "opencv2/legacy/legacy.hpp" //BruteForceMatcher实际在该头文件中
#include "opencv2/features2d/features2d.hpp" //FlannBasedMatcher实际在该头文件中
#include "opencv2/highgui/highgui.hpp"
using namespace cv;
using namespace std;
int main( int argc, char** argv )
{
Mat src_1 = imread( "D:\\opencv_pic\\cat3d120.jpg", CV_LOAD_IMAGE_GRAYSCALE );
Mat src_2 = imread( "D:\\opencv_pic\\cat0.jpg", CV_LOAD_IMAGE_GRAYSCALE );
if( !src_1.data || !src_2.data )
{
cout keypoints_1, keypoints_2;
detector.detect( src_1, keypoints_1 );
detector.detect( src_2, keypoints_2 );
cout allMatches;
matcher.match( descriptors_1, descriptors_2, allMatches );
cout maxDist )
maxDist = dist;
}
printf(" max dist : %f \n", maxDist );
printf(" min dist : %f \n", minDist );
//-- 过滤匹配点,保留好的匹配点(这里采用的标准:distance goodMatches;
for( int i = 0; i (),
DrawMatchesFlags::NOT_DRAW_SINGLE_POINTS //不显示未匹配的点
);
imshow("matching result", matchImg );
//-- 输出匹配点的对应关系
for( int i = 0; i <br>
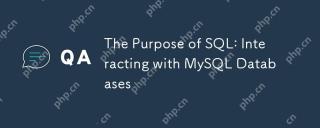
<p>实验结果:</p>
<img src="/static/imghwm/default1.png" data-src="/inc/test.jsp?url=http%3A%2F%2Fimg.blog.csdn.net%2F20141115151359125%3Fwatermark%2F2%2Ftext%2FaHR0cDovL2Jsb2cuY3Nkbi5uZXQvaG9seWJpbg%3D%3D%2Ffont%2F5a6L5L2T%2Ffontsize%2F400%2Ffill%2FI0JBQkFCMA%3D%3D%2Fdissolve%2F70%2Fgravity%2FSouthEast&refer=http%3A%2F%2Fblog.csdn.net%2Fu012564690%2Farticle%2Fdetails%2F17370511" class="lazy" alt="OpenCV中feature2D学习SIFT和SURF算子实现特征点提取与匹配" ><br>
<p><br>
</p>
<p>从第二个实验结果可以看出,经过过滤之后特征点数目从49减少到33,匹配的准确度有所上升。当然也可以使用SIFT算子进行上述两种匹配实验,只需要将SurfFeatureDetector换成SiftFeatureDetector,将SurfDescriptorExtractor换成SiftDescriptorExtractor即可。</p>
<p><br>
</p>
<h1 id="span-拓展-span"><span>拓展</span></h1>
<p> 在FLANN匹配法的基础上,还可以进一步利用透视变换和空间映射找出已知物体(目标检测),具体来说就是利用findHomography函数利用匹配的关键点找出相应的变换,再利用perspectiveTransform函数映射点群。具体可以参考这篇文章:OpenCV中feature2D学习——SIFT和SURF算法实现目标检测。</p>
<p><br>
</p>
</iostream></stdio.h>
 MySQL: Compétences essentielles pour les débutants à maîtriserApr 18, 2025 am 12:24 AM
MySQL: Compétences essentielles pour les débutants à maîtriserApr 18, 2025 am 12:24 AMMySQL convient aux débutants pour acquérir des compétences de base de données. 1. Installez les outils MySQL Server et Client. 2. Comprendre les requêtes SQL de base, telles que SELECT. 3. 掌握数据操作: : 创建表、插入、更新、删除数据。 4. 学习高级技巧: : 子查询和窗口函数。 5. 调试和优化: : 检查语法、使用索引、避免 Sélectionner * , 并使用 Limite。
 MySQL: données structurées et bases de données relationnellesApr 18, 2025 am 12:22 AM
MySQL: données structurées et bases de données relationnellesApr 18, 2025 am 12:22 AMMySQL gère efficacement les données structurées par la structure de la table et la requête SQL, et met en œuvre des relations inter-tableaux à travers des clés étrangères. 1. Définissez le format de données et tapez lors de la création d'une table. 2. Utilisez des clés étrangères pour établir des relations entre les tables. 3. Améliorer les performances par l'indexation et l'optimisation des requêtes. 4. Bases de données régulièrement sauvegarde et surveillent régulièrement la sécurité des données et l'optimisation des performances.
 MySQL: fonctionnalités et capacités clés expliquésApr 18, 2025 am 12:17 AM
MySQL: fonctionnalités et capacités clés expliquésApr 18, 2025 am 12:17 AMMySQL est un système de gestion de base de données relationnel open source qui est largement utilisé dans le développement Web. Ses caractéristiques clés incluent: 1. Prend en charge plusieurs moteurs de stockage, tels que InNODB et Myisam, adaptés à différents scénarios; 2. Fournit des fonctions de réplication à esclave maître pour faciliter l'équilibrage de la charge et la sauvegarde des données; 3. Améliorez l'efficacité de la requête grâce à l'optimisation des requêtes et à l'utilisation d'index.
 Le but de SQL: interagir avec les bases de données MySQLApr 18, 2025 am 12:12 AM
Le but de SQL: interagir avec les bases de données MySQLApr 18, 2025 am 12:12 AMSQL est utilisé pour interagir avec la base de données MySQL pour réaliser l'ajout de données, la suppression, la modification, l'inspection et la conception de la base de données. 1) SQL effectue des opérations de données via des instructions SELECT, INSERT, UPDATE, DELETE; 2) Utiliser des instructions Create, Alter, Drop pour la conception et la gestion de la base de données; 3) Les requêtes complexes et l'analyse des données sont mises en œuvre via SQL pour améliorer l'efficacité de la prise de décision commerciale.
 MySQL pour les débutants: commencer la gestion de la base de donnéesApr 18, 2025 am 12:10 AM
MySQL pour les débutants: commencer la gestion de la base de donnéesApr 18, 2025 am 12:10 AMLes opérations de base de MySQL incluent la création de bases de données, les tables et l'utilisation de SQL pour effectuer des opérations CRUD sur les données. 1. Créez une base de données: CreatedAtAbaseMy_First_DB; 2. Créez un tableau: CreateTableBooks (idIntauto_inCmentPrimaryKey, TitleVarchar (100) notnull, AuthorVarchar (100) notnull, publied_yearint); 3. Données d'insertion: INSERTINTOBOOKS (titre, auteur, publié_year) VA
 Rôle de MySQL: Bases de données dans les applications WebApr 17, 2025 am 12:23 AM
Rôle de MySQL: Bases de données dans les applications WebApr 17, 2025 am 12:23 AMLe rôle principal de MySQL dans les applications Web est de stocker et de gérer les données. 1.MySQL traite efficacement les informations utilisateur, les catalogues de produits, les enregistrements de transaction et autres données. 2. Grâce à SQL Query, les développeurs peuvent extraire des informations de la base de données pour générer du contenu dynamique. 3.MySQL fonctionne basé sur le modèle client-serveur pour assurer une vitesse de requête acceptable.
 MySQL: Construire votre première base de donnéesApr 17, 2025 am 12:22 AM
MySQL: Construire votre première base de donnéesApr 17, 2025 am 12:22 AMLes étapes pour construire une base de données MySQL incluent: 1. Créez une base de données et une table, 2. Insérer des données et 3. Conduisez des requêtes. Tout d'abord, utilisez les instructions CreateDatabase et CreateTable pour créer la base de données et la table, puis utilisez l'instruction InsertInto pour insérer les données, et enfin utilisez l'instruction SELECT pour interroger les données.
 MySQL: une approche adaptée aux débutants du stockage de donnéesApr 17, 2025 am 12:21 AM
MySQL: une approche adaptée aux débutants du stockage de donnéesApr 17, 2025 am 12:21 AMMySQL convient aux débutants car il est facile à utiliser et puissant. 1.MySQL est une base de données relationnelle et utilise SQL pour les opérations CRUD. 2. Il est simple à installer et nécessite la configuration du mot de passe de l'utilisateur racine. 3. Utilisez l'insertion, la mise à jour, la suppression et la sélection pour effectuer des opérations de données. 4. OrderBy, où et jointure peut être utilisé pour des requêtes complexes. 5. Le débogage nécessite de vérifier la syntaxe et d'utiliser Expliquez pour analyser la requête. 6. Les suggestions d'optimisation incluent l'utilisation d'index, le choix du bon type de données et de bonnes habitudes de programmation.


Outils d'IA chauds

Undresser.AI Undress
Application basée sur l'IA pour créer des photos de nu réalistes

AI Clothes Remover
Outil d'IA en ligne pour supprimer les vêtements des photos.

Undress AI Tool
Images de déshabillage gratuites

Clothoff.io
Dissolvant de vêtements AI

AI Hentai Generator
Générez AI Hentai gratuitement.

Article chaud
Outils chauds

Version Mac de WebStorm
Outils de développement JavaScript utiles

SublimeText3 Linux nouvelle version
Dernière version de SublimeText3 Linux

Télécharger la version Mac de l'éditeur Atom
L'éditeur open source le plus populaire

SublimeText3 version anglaise
Recommandé : version Win, prend en charge les invites de code !

Adaptateur de serveur SAP NetWeaver pour Eclipse
Intégrez Eclipse au serveur d'applications SAP NetWeaver.

