
Home >Technology peripherals >AI >Haomo Cam4DOcc was selected for CVPR2024: using only cameras for 4D network prediction, giving autonomous driving the ability to predict space and time
Haomo Cam4DOcc was selected for CVPR2024: using only cameras for 4D network prediction, giving autonomous driving the ability to predict space and time

- WBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBforward
- 2024-03-07 14:19:021111browse
On February 27, 2024, the paper "Cam4DOcc: Benchmark for Camera-Only 4D Occupancy Forecasting in Autonomous Driving Applications" submitted by the HaoMo Zhixing artificial intelligence technology team was successfully selected for the top international conference CVPR 2024.
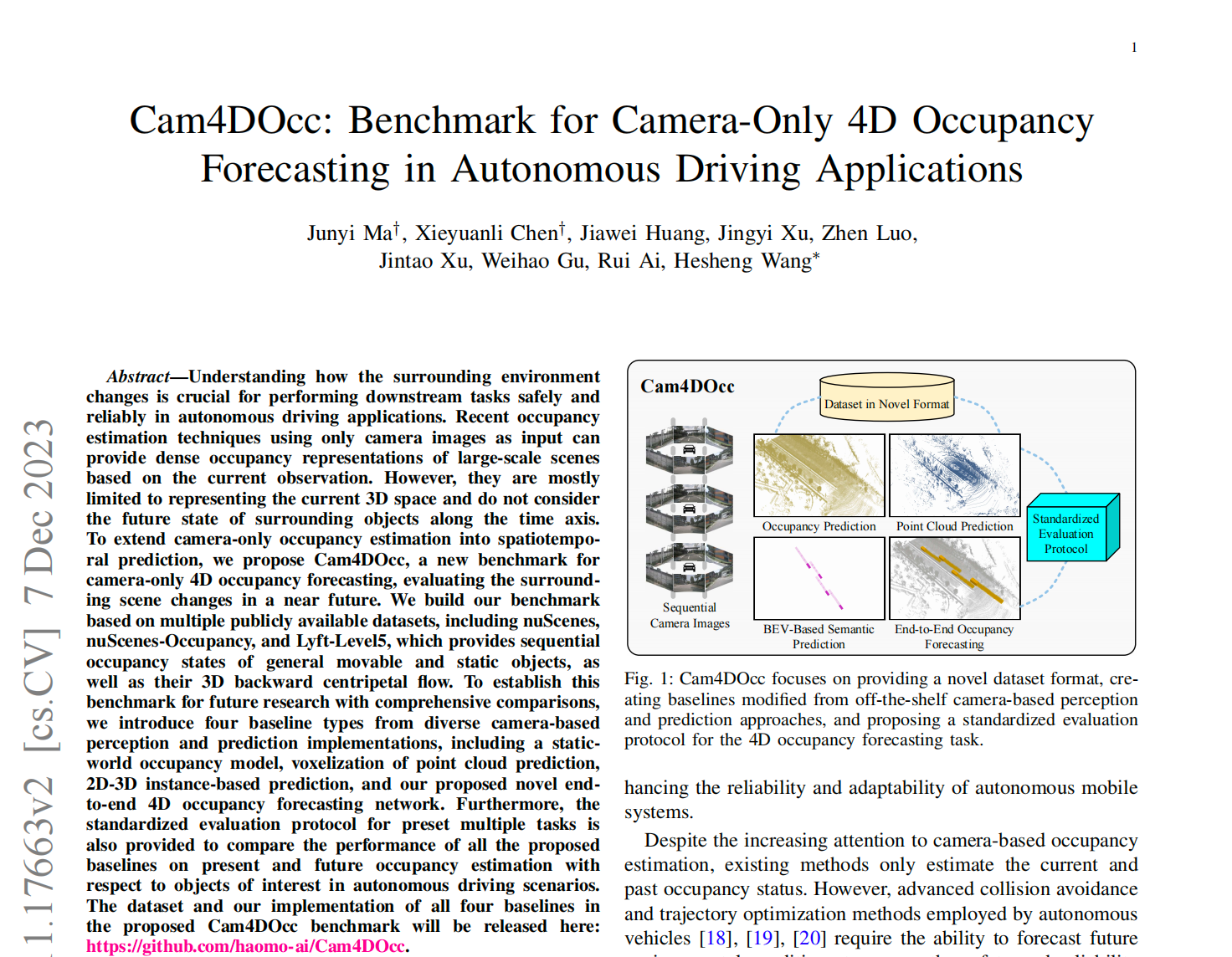
Cam4DOcc is a new benchmark proposed by Hao Mo, which uses cameras for 4D occupancy grid prediction. This method can assess changes in the surrounding scene in the near future, extending camera occupancy grid estimation to spatiotemporal prediction. In this way, the autonomous driving system's ability to perceive and predict dynamic changes in the surrounding environment has been improved.
First, Hao Mo created a new format data set based on several publicly available data sets, and further proposed a standardized evaluation protocol and four baseline types to provide a basic reference for the Cam4DOcc benchmark. Secondly, Haimo proposed the first camera-based 4D occupancy prediction network OCFNet to estimate future occupancy status in an end-to-end manner. Finally, Haomo conducted multiple experiments based on the Cam4DOcc benchmark, involving four different tasks, to comprehensively evaluate the proposed baseline as well as OCFNet. Experimental results show that OCFNet outperforms all baselines and produces reasonable future occupancy even when seeing limited training data. By comparing four different types of baselines, Haomo demonstrates that end-to-end spatiotemporal networks may be the most promising research direction for occupancy prediction using only cameras. Furthermore, the use of dilated GMO annotations and additional 3D reverse radial flow has also been shown to be beneficial for 4D occupancy predictions.

The IEEE Conference on Computer Vision and Pattern Recognition (CVPR) is one of the three top conferences in the field of computer vision and pattern recognition. Organized by top universities and institutions such as the University of Newcastle, University of Technology Sydney, and Johns Hopkins University. CVPR has very strict admission standards. Hao Mo’s paper proposing the Cam4DOcc method was successfully selected for CVPR2024, which represents recognition of Hao Mo’s technological exploration achievements.
Since its establishment, Feimo has always been based on technological innovation, and has continuously obtained many technological patents that lead the industry. It has taken the lead in laying out the development direction of autonomous driving technology with large models, large computing power, and big data in China. The industry's first self-driving generative model DriveGPT, Xuehu·Hairuo, released by Haimo, has brought huge technological improvements in the development process of the self-driving system, making the development of Haimo's self-driving system completely enter a new mode, and it has also greatly accelerated The development process of automobile intelligence.
The above is the detailed content of Haomo Cam4DOcc was selected for CVPR2024: using only cameras for 4D network prediction, giving autonomous driving the ability to predict space and time. For more information, please follow other related articles on the PHP Chinese website!
Related articles
See more- Tesla plans to set up an electric vehicle factory in India to activate the Indian electric vehicle industry
- To help the development of the Yuanverse industry, this mobile communication innovative application competition has been launched
- Xiaoyu Yilian appeared at the China International Intelligent Industry Expo
- The scale of my country's computing industry reaches 2.6 trillion yuan, with more than 20.91 million general-purpose servers and 820,000 AI servers shipped in the past six years.
- The 2023 First Yangtze River Delta Robot Industry Chain Collaborative Development Summit Forum was successfully held in Wuhu, Anhui