

Can Linux run on 8-bit MCU?

We often see beginners asking on microcontroller forums whether their puny 8-bit microcontrollers can run Linux. These questions often elicit a burst of laughter. We often see people on Linux forums asking what are the minimum requirements to run Linux. The common answer is that Linux requires a 32-bit architecture and an MMU (Memory Management Unit), and at least 1MB of RAM to satisfy the kernel.
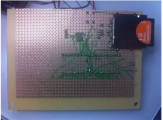
However, this project aims to (and has succeeded in) shattering these perceptions. The development board shown in the picture below is based on ATmega1284P. I (a foreigner) also made a development board based on ATmega644a, which was also successful. This development board does not use another processor and can boot the Linux 2.6.34 kernel. In fact, it can even run a full Ubuntu stack, including X (if you're willing to wait for it to boot) and the gnome desktop environment.

▍RAM (random access memory)
Yes, that's right, a full Linux installation requires several megabytes of RAM and a 32-bit CPU with an MMU. This project has it all. First, let's access the RAM. As you can see, there is an antique 30-pin SIMM memory module in the circuit. These are what 80286 based PCs once used. It interfaces with the ATmega and I write code to access it and refresh it as per specs (SDRAM needs constant rate refresh to avoid losing data).
How fast is it? The refresh interrupt occurs every 62ms and takes up 1.5ms, so it takes up less than 3% of the CPU. Access RAM, for ease of programming, one byte at a time. The maximum bandwidth this produces is about 300KBps.

***▍*Storage
For RAM to work in sleep state, we have two things to deal with. Storage is not a problem that is too difficult to solve. It is very easy to interact with the SD card using SPI, which I did in my project. A 1GB SD card will work just fine, although 512MB is sufficient for this particular file system (Ubuntu Jaunty).
ATmega has a hardware SPI module, but for whatever reason, it didn't work very smoothly, so I bit-stripped the interface. It's still chunky enough - about 200KBps. It also makes perfect sense for the project - it can be implemented on any microcontroller with enough pins, without using additional hardware modules.
***▍*CPU (Central Processing Unit)
All that remains is that 32-bit CPU and MMU requirements. However, the AVR does not have an MMU, and it is 8-bit. To overcome this difficulty, I wrote an ARM emulator. ARM is the architecture I'm most familiar with, and it's simple enough for me to feel comfortable writing an emulator for it. Why write one instead of porting one?
Well, porting someone else's code is no fun, plus I've seen no documented documentation of easily porting emulators to 8-bit devices. One reason: the AVR compiler's insistence on 16 bits for handling integers will cause you trouble with simple "(1
***▍*Other functions
The board communicates with the real world through a serial port. Currently it's connected via a serial port to a minicom running on my PC, but an alternative connection it could test would be a keyboard and character LCD connected to the circuit that would make it completely standalone. There are two more LEDs on the board. They indicate access to the SD card. One represents the read operation and the other represents the write operation. There is also a button on the circuit board. When pressed and held for 1 second it will take the serial port out of the currently effective speed of the emulated CPU. The main frequency of the AVR is 24MHz (a slight overclock above the original 20MHz).
***▍*How fast is it?
uARM definitely does not have a rate daemon. It took about 2 hours to boot into the BASH prompt ("init=/bin/bash" kernel command line). Then it took more than 4 hours to start the entire Ubuntu ("exec init" and then log in). Starting X will take longer. The effective emulated CPU speed is about 6.5KHz, which is about what you'd expect emulating a 32-bit CPU and MMU on a measly 8-bit microcontroller. Oddly, once booted, the system is somewhat usable. You can enter a command and get a response within a minute. Which means you can actually use it. For example, I used it to format my SD card today. It's definitely not the fastest, but I feel like it's probably the cheapest, slowest, easiest to assemble by hand, has the lowest parts count, and is the lowest-end Linux PC. The circuit board is hand-soldered using wires, without even the need for a printed circuit board (PCB).
***▍*Details of the emulator?
The emulator is quite modular, allowing it to be expanded to emulate other SoCs (systems on a chip) and hardware configurations at will. The simulated CPU is ARMv5TE. Some time ago, I started working on supporting ARMv6, but it has not been completed (as can be seen from the code) because it is not very needed. The simulated SoC is PXA255.
Due to the modular design, you can replace the SoC.c file and compile a complete new SoC using the same ARMv5TE core, or replace the core, or replace the peripherals as you wish. This is on purpose, I mean this code is also a pretty neat example of how an ARM SoC works. The code of the CPU emulator itself isn't too neat, so, well, it's a CPU emulator. This was written a few years ago in over 6 months of free time and then put aside. It was recently resurrected specifically for this project. The emulator implements i-cache to improve speed. This gives the AVR a lot of help, allowing the internal memory to be accessed at over 5MB per second unlike my external RAM. I haven't gotten around to implementing d-cache (data caching) yet, but it's on my to-do list. Accessing block devices is not emulated as SD devices. This turned out to be too slow. Instead there is a paravirtualized disk device (pvdisk, see pvDisk.tar.bz2, GPL licensed), which I wrote using an invalid opcode to load the emulator and access the disk. The ramdisk (virtual disk) in my image loads this pvdisk and then changes the root directory to /dev/pvd1.
ramdisk is included in "rd.img". The "machine type" I'm using is PalmTE2. Why? Since I'm very familiar with this hardware, it's the first type of PXA255 machine I've seen.
***▍*Hypercall?
There are some services you can make requests to the emulator by using a special opcode. In ARM it's 0xF7BBBBBB, in Thumb it's 0xBBBB. These were picked because they are in a range where ARM guarantees are undefined. The hypercall number is passed in register R12, the parameters are passed in registers R0-R3, and the return value is placed in R0.
transfer:
· 0 = Stop simulation
· 1 = print decimal number
· 2 = print characters
· 3 = Get RAM size
· 4 = Block device operation (R0 = operation, R1 = sector number). Note that these do not write to the emulated RAM, they use another hypercall to fill the emulator's internal buffer accessed by the emulated user, one word at a time. I meant to implement DMA, but haven't gotten around to it yet.
operate:
· 0 = Get information (if the sector number is 0, return the number of sectors; if the sector number is 1, return the sector size in bytes)
· 1 = sector read
· 2 = Sector Write
· 5 = Block device buffer access (R0 = value in/value out, R1 = number of words, R2 = 1 if written, 0 otherwise)
***▍*Thumb support?
Fully supports Thumb. I cheated a bit and decoded each Thumb instruction string (instr) into the equivalent ARM instruction string and executed it instead of using the ARM emulator function. It's not as fast as the original, but it's simple and the code is small. It is possible to use a 256KB lookup table, but I feel that 256KB is too large for the microcontroller's flash memory. Some Thumb instructions cannot be converted to ARM instructions, they are processed correctly instead.
I want to build one!
For non-commercial purposes, you can definitely do this. The wiring method is as follows:
· RAM’s DQ0-DQ7 are connected to AVR’s C0-C7;
· A0-A7 of RAM is connected to A0-A7 of AVR;
· A8-A11 of RAM is connected to B0-B3 of AVR;
· RAM nRAM nRAS nCAS nWE connected to AVR D7 B4 B5;
·SD’s DI SCK DO is connected to AVR’s B6 B7 D6;
· The read write of LED is connected to D2 D3 of AVR (other pins of LED are connected to ground);
· The button is connected to D4 of the AVR (other pins are connected to ground).
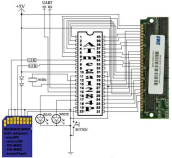
The RAM can be any 30-pin 16MB SIMM that can run at a CAS-before-RAS refresh rate of 4000 cycles every 64 milliseconds. The one I use (OWC) can be purchased online for a few bucks. The schematic is shown here, click to enlarge.
***▍*Source code?
This code is a bit messy, but it works (the code cannot be downloaded in China). To set up the emulator on your PC and try it out type "make". To run use "./uARM DISK_IMAGE". To build the optimized PC version use "make BUILD=opt". To build a running version of AVR use "make BUILD=avr". Now, it is compiled to target ATmega1284P. To compile with ATmega644 as the target, in addition to modifying the makefile, reduce the number in icache.h so that the i-cache is small enough to match the RAM inside the 644. Also included in the archive are the final hex files for 1284p.
▍Startup process
To preserve code space in AVR, almost no startup code exists in the emulator. In fact, the "ROM" totals 50 bytes: 8 bytes are used to select Thumb mode, and some Thumb code reads the first sector of the SD card and jumps to Thumb mode (see embeddedBoot.c). The SD card's MBR has another bootloader (writing in Thumb mode). This bootloader looks at the MBR, finds the active partition and loads its contents to the end of RAM. Then, it jumps to destination RAM address 512 (see mbrBoot.c). The third and largest bootloader, ELLE (see ELLE.c), is running here. This bootloader relocates the ramdisk, sets up ATAGS, and calls the kernel. I provide all binaries and source code so that you can make your own image if you wish. The boot process is reminiscent of PC booting. :) The included mkbooting.sh tool can be used to create a working image for the boot partition.
The above is the detailed content of Can Linux run on 8-bit MCU?. For more information, please follow other related articles on the PHP Chinese website!

 What is the salary of Linux administrator?Apr 17, 2025 am 12:24 AM
What is the salary of Linux administrator?Apr 17, 2025 am 12:24 AMThe average annual salary of Linux administrators is $75,000 to $95,000 in the United States and €40,000 to €60,000 in Europe. To increase salary, you can: 1. Continuously learn new technologies, such as cloud computing and container technology; 2. Accumulate project experience and establish Portfolio; 3. Establish a professional network and expand your network.
 What is the main purpose of Linux?Apr 16, 2025 am 12:19 AM
What is the main purpose of Linux?Apr 16, 2025 am 12:19 AMThe main uses of Linux include: 1. Server operating system, 2. Embedded system, 3. Desktop operating system, 4. Development and testing environment. Linux excels in these areas, providing stability, security and efficient development tools.
 Does the internet run on Linux?Apr 14, 2025 am 12:03 AM
Does the internet run on Linux?Apr 14, 2025 am 12:03 AMThe Internet does not rely on a single operating system, but Linux plays an important role in it. Linux is widely used in servers and network devices and is popular for its stability, security and scalability.
 What are Linux operations?Apr 13, 2025 am 12:20 AM
What are Linux operations?Apr 13, 2025 am 12:20 AMThe core of the Linux operating system is its command line interface, which can perform various operations through the command line. 1. File and directory operations use ls, cd, mkdir, rm and other commands to manage files and directories. 2. User and permission management ensures system security and resource allocation through useradd, passwd, chmod and other commands. 3. Process management uses ps, kill and other commands to monitor and control system processes. 4. Network operations include ping, ifconfig, ssh and other commands to configure and manage network connections. 5. System monitoring and maintenance use commands such as top, df, du to understand the system's operating status and resource usage.
 Boost Productivity with Custom Command Shortcuts Using Linux AliasesApr 12, 2025 am 11:43 AM
Boost Productivity with Custom Command Shortcuts Using Linux AliasesApr 12, 2025 am 11:43 AMIntroduction Linux is a powerful operating system favored by developers, system administrators, and power users due to its flexibility and efficiency. However, frequently using long and complex commands can be tedious and er
 What is Linux actually good for?Apr 12, 2025 am 12:20 AM
What is Linux actually good for?Apr 12, 2025 am 12:20 AMLinux is suitable for servers, development environments, and embedded systems. 1. As a server operating system, Linux is stable and efficient, and is often used to deploy high-concurrency applications. 2. As a development environment, Linux provides efficient command line tools and package management systems to improve development efficiency. 3. In embedded systems, Linux is lightweight and customizable, suitable for environments with limited resources.
 Essential Tools and Frameworks for Mastering Ethical Hacking on LinuxApr 11, 2025 am 09:11 AM
Essential Tools and Frameworks for Mastering Ethical Hacking on LinuxApr 11, 2025 am 09:11 AMIntroduction: Securing the Digital Frontier with Linux-Based Ethical Hacking In our increasingly interconnected world, cybersecurity is paramount. Ethical hacking and penetration testing are vital for proactively identifying and mitigating vulnerabi
 How to learn Linux basics?Apr 10, 2025 am 09:32 AM
How to learn Linux basics?Apr 10, 2025 am 09:32 AMThe methods for basic Linux learning from scratch include: 1. Understand the file system and command line interface, 2. Master basic commands such as ls, cd, mkdir, 3. Learn file operations, such as creating and editing files, 4. Explore advanced usage such as pipelines and grep commands, 5. Master debugging skills and performance optimization, 6. Continuously improve skills through practice and exploration.


Hot AI Tools

Undresser.AI Undress
AI-powered app for creating realistic nude photos

AI Clothes Remover
Online AI tool for removing clothes from photos.

Undress AI Tool
Undress images for free

Clothoff.io
AI clothes remover

AI Hentai Generator
Generate AI Hentai for free.

Hot Article
Hot Tools

Zend Studio 13.0.1
Powerful PHP integrated development environment

SublimeText3 English version
Recommended: Win version, supports code prompts!

Dreamweaver CS6
Visual web development tools

MantisBT
Mantis is an easy-to-deploy web-based defect tracking tool designed to aid in product defect tracking. It requires PHP, MySQL and a web server. Check out our demo and hosting services.

VSCode Windows 64-bit Download
A free and powerful IDE editor launched by Microsoft

