

 Technology peripheralsAIGeneral research into autonomous parking, integrating industry standards, trend assessments and system introductions
Technology peripheralsAIGeneral research into autonomous parking, integrating industry standards, trend assessments and system introductionsGeneral research into autonomous parking, integrating industry standards, trend assessments and system introductions

Written in front
The automatic parking system means that the vehicle can independently find a parking space and complete accurate parking without manual intervention. It can also park according to the user's needs. The requirement is moved to the specified location. The maturity of this technology will greatly alleviate people's inconvenience during the parking process, such as wasting time looking for a parking space for a long time, as well as safety issues such as vehicle collision and friction that may occur when looking for a parking space.
Currently, many technology companies and university laboratories are exploring the field of autonomous parking. Companies such as Mercedes-Benz and Bosch have established parking infrastructure. NVIDIA is developing automatic driving algorithms and parking space detection methods for parking lots. BMW has also installed automatic parking modules on production vehicles.
Considering the widespread demand for automatic parking technology in the industry, we conducted a systematic survey on the development status of automatic parking systems. Including the industry standard trends of automatic parking systems, performance evaluation indicators, technologies designed into each sub-module of the automatic parking system, etc.
Current standard trends in the automatic parking industry
As the current automatic parking system has received widespread attention from industry and academia, various countries and companies are Continuously develop automatic parking technology. Therefore, it is particularly important to formulate standards for automatic parking technology. The technical standards that have been developed include Geographical Information, Outdoor Positioning, Indoor Space Positioning, Parking Standard and Vehicle Communication Standard Several aspects of content, specific standards are summarized in the following table.
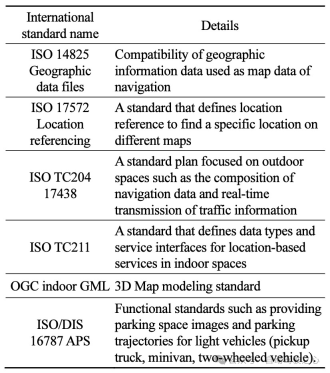
Relevant standards for the automatic parking industry
- Geographic information and positioning standards establish principles and basis for the naming, definition and format of outdoor spaces , Such standards include ISO 14825, ISO 17572 and ISO TC204 177438, etc.
- The standardization of indoor space positioning is also being formulated, including ISO TC211 and OGC standards.
- ISO/DIS 16787 APS parking standard proposes the types of information required for parking and defines the technical name for controlling the vehicle. In addition, the standard defines the functions required to implement an assisted parking system and perform steering control functions of the vehicle.
Evaluation standards for automatic parking systems
The current evaluation of automatic parking systems includes two parts, namely evaluation of the automatic driving part and Review of the automatic parking part.
Evaluation Standards for Autonomous Driving Parts
The evaluation of autonomous driving technology follows the "Autonomous Driving Technology Stage" standards formulated by the Society of Automotive Engineering, which combines autonomous driving technology It is divided into six levels and classified according to technical level, control subject and driving ability. To make it easier to evaluate each level, the ISO/WD 34501 and ISO/WD 34502 standards under development were proposed. The ISO/WD 34501 standard applies to terms and definitions for test scenarios in Level 3 systems, while the ISO/WD 34502 standard provides guidance on test scenarios and a safety assessment process. The formulation of these standards aims to provide unified evaluation criteria for the development and application of autonomous driving technology and promote the development of autonomous driving technology.
Evaluation standards for the automatic parking part
Although automatic parking technology is currently attracting much attention, the formulation of international standards is still in its infancy. Unlike autonomous driving evaluation standards, the technical level of autonomous parking is mainly measured by developers’ evaluation standards.
The following table shows examples of autonomous parking scenarios in the traffic situation scenario system. Parking scenarios are divided according to performance levels.
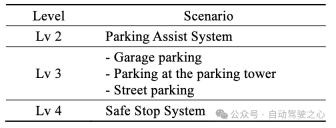
Automatic parking level division
The traffic situation scenario system evaluation includes autonomous driving and parking scenarios, and uses the "automatic parking" defined by the Society of Automotive Engineering. Driving Skills Stage” to point out the ability to self-park. There are currently three levels in the system.
- The second level (Lv2): called the parking assist system is used to help people park more conveniently. At Lv2 level, vehicles are usually equipped with an obstacle distance warning system and a rearview camera.
- The third level (Lv3): Lv3 level can realize automatic parking in specified scenarios. For example, simple parking scenarios such as parking in a garage.
- The fourth level (Lv4): All scenes in Lv3 can be executed at Lv4 level. In addition, when the vehicle encounters an obstacle, the vehicle can return to its destination after stopping or avoiding the obstacle.
Detailed explanation of the automatic parking system
At present, the automatic parking system mainly includes three parts, as shown in the figure below, respectivelySearch Driving process , Automatic parking process and Return to driving process. We first give a general introduction to each process, and then introduce the current development trends of each process.
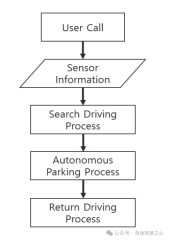
Workflow of the automatic parking system
Search driving process
The ultimate goal of the search driving process is to be in the parking lot The car can find a parking space independently, so the process requires positioning, anti-collision and parking space detection technology.
Introduction to positioning technology
In the automatic parking system, you can use GPS or the IMU sensor that comes with the vehicle to confirm the speed and speed of the vehicle. Attitude and correct the vehicle's position estimation error. However, in some indoor scenes, the GPS signal cannot be received. Therefore, self-driving vehicles need to be equipped with cameras, lidar and millimeter-wave radar for assistance. The picture below is an introduction to some sensor information equipped on the vehicle.
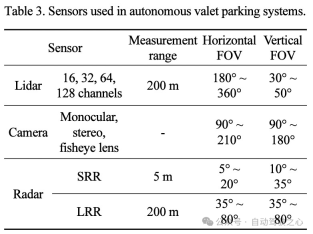
Introduction to sensor information equipped with automatic parking vehicles
- Lidar sensors use laser light to detect objects. The currently popular lidars are mainly divided into 16, 32, 64 and 128 lines of lidars. Its measurement range is approximately 200 meters and its vertical field of view is 30 to 50 degrees.
- Camera sensors can be roughly divided into monocular, binocular and fisheye types. Typically, autonomous vehicles are equipped with cameras with a horizontal field of view of 90 to 210 degrees and a vertical field of view of 90 to 180 degrees.
- Millimeter wave radar can be divided into short-range radar and long-range radar based on distance. Among them, the range of short-range radar is about 5 meters, the horizontal field of view is 5 to 20 degrees, and the vertical field of view is 10 to 35 degrees. The range of long-range radar can be about 200 meters, with a horizontal and vertical field of view of 35 to 80 degrees.
After obtaining the information collected by these different sensors, SLAM mapping technology can be used to reconstruct the environment around the autonomous vehicle, thereby positioning the vehicle. The SLAM mapping technology can be divided into the following two categories: Direct mapping method: tracking the intensity of the data that changes when the sensor moves to estimate the attitude of the sensor. However, because this type of method is easily affected by lighting changes and cannot achieve relocation, current mapping methods are rarely based on this type of method.
- Feature-based mapping method: This method first obtains the feature points of surrounding objects from sensor information. Feature points received from the same object are projected to two different sensor coordinates, and the position of the target is estimated by calculating the geometric relationship of the projected points.
Since the main application scenario of the automatic parking system is in the parking lot, and there will be There are a lot of cars parked, so anti-collision technology is very important. In anti-collision technology, ultrasonic sensors
,short wave radar sensors, lidar sensors and camera sensors are mainly used. Acoustic and radar sensors are mainly used to achieve accurate ranging. Camera sensors mainly use the difference in position of the same object in consecutive images to estimate distance in depth.
Parking space detection technologyParking space detection is continuously performed during the search and driving process, and usually includes traditional computer vision, Deep learning and hybrid implementations of the two methods.
Traditional computer vision mainly specifies and identifies the shape of parking spaces, such as parking space line detection and feature point detection, as shown in the figure below.Example of parking space shape
Parking space detection process based on convolutional neural network
Automatic parking process
If the previous step Once an available parking space has been found during the search driving process, the system calls up the automated parking process. Generally, we use path generation methods to implement the autonomous parking process. Currently, the mainstream path generation methods mainly include algorithm-based methods and reinforcement learning-based methods.
The algorithm-based approach involves calculating the location and shape of the path to the parking space and the current location of the vehicle. In order to calculate a suitable parking path, the algorithm involves algorithms such as optimal control problems, grid-based path planning methods, and rapid exploration of random trees.
Reinforcement learning-based methods can generate optimal paths for autonomous parking processes in autonomous parking simulators. In an autonomous parking simulator, the vehicle learns a common parking procedure. This learning method continuously obtains the optimal path with the highest parking accuracy by repeating the path generation process and evaluation, as shown in the figure below.

Reverse parking process of automatic parking
Return to driving process
Return to driving process refers to the When the self-driving vehicle enters the parking space and is waiting, the user can call the vehicle to move it to the place designated by the user. In this process, we need to use path tracking technology.
Currently, path tracking technology includes methods of tracking traveling paths and methods of tracking modified paths. However, both methods use similar vehicle control algorithms. For details, please refer to the paper [1-2]. The general idea is to execute the control command to move the vehicle along the generated path, taking into account the vehicle's current position and steering angle conditions.
Conclusion
Due to the current increasing demand for automatic parking technology, various countries and manufacturers are vigorously developing automatic parking systems. Taking into account the rapid development of automatic parking technology, in this article, we summarize the standardization trends, evaluation standards and various components of automatic parking systems in automatic parking systems and introduce them in detail. We hope it can be helpful to everyone. ~

Original link: https://mp.weixin.qq.com/s/UPwW0E8LTX5V79GK12HF_Q
The above is the detailed content of General research into autonomous parking, integrating industry standards, trend assessments and system introductions. For more information, please follow other related articles on the PHP Chinese website!

 The AI Skills Gap Is Slowing Down Supply ChainsApr 26, 2025 am 11:13 AM
The AI Skills Gap Is Slowing Down Supply ChainsApr 26, 2025 am 11:13 AMThe term "AI-ready workforce" is frequently used, but what does it truly mean in the supply chain industry? According to Abe Eshkenazi, CEO of the Association for Supply Chain Management (ASCM), it signifies professionals capable of critic
 How One Company Is Quietly Working To Transform AI ForeverApr 26, 2025 am 11:12 AM
How One Company Is Quietly Working To Transform AI ForeverApr 26, 2025 am 11:12 AMThe decentralized AI revolution is quietly gaining momentum. This Friday in Austin, Texas, the Bittensor Endgame Summit marks a pivotal moment, transitioning decentralized AI (DeAI) from theory to practical application. Unlike the glitzy commercial
 Nvidia Releases NeMo Microservices To Streamline AI Agent DevelopmentApr 26, 2025 am 11:11 AM
Nvidia Releases NeMo Microservices To Streamline AI Agent DevelopmentApr 26, 2025 am 11:11 AMEnterprise AI faces data integration challenges The application of enterprise AI faces a major challenge: building systems that can maintain accuracy and practicality by continuously learning business data. NeMo microservices solve this problem by creating what Nvidia describes as "data flywheel", allowing AI systems to remain relevant through continuous exposure to enterprise information and user interaction. This newly launched toolkit contains five key microservices: NeMo Customizer handles fine-tuning of large language models with higher training throughput. NeMo Evaluator provides simplified evaluation of AI models for custom benchmarks. NeMo Guardrails implements security controls to maintain compliance and appropriateness
 AI Paints A New Picture For The Future Of Art And DesignApr 26, 2025 am 11:10 AM
AI Paints A New Picture For The Future Of Art And DesignApr 26, 2025 am 11:10 AMAI: The Future of Art and Design Artificial intelligence (AI) is changing the field of art and design in unprecedented ways, and its impact is no longer limited to amateurs, but more profoundly affecting professionals. Artwork and design schemes generated by AI are rapidly replacing traditional material images and designers in many transactional design activities such as advertising, social media image generation and web design. However, professional artists and designers also find the practical value of AI. They use AI as an auxiliary tool to explore new aesthetic possibilities, blend different styles, and create novel visual effects. AI helps artists and designers automate repetitive tasks, propose different design elements and provide creative input. AI supports style transfer, which is to apply a style of image
 How Zoom Is Revolutionizing Work With Agentic AI: From Meetings To MilestonesApr 26, 2025 am 11:09 AM
How Zoom Is Revolutionizing Work With Agentic AI: From Meetings To MilestonesApr 26, 2025 am 11:09 AMZoom, initially known for its video conferencing platform, is leading a workplace revolution with its innovative use of agentic AI. A recent conversation with Zoom's CTO, XD Huang, revealed the company's ambitious vision. Defining Agentic AI Huang d
 The Existential Threat To UniversitiesApr 26, 2025 am 11:08 AM
The Existential Threat To UniversitiesApr 26, 2025 am 11:08 AMWill AI revolutionize education? This question is prompting serious reflection among educators and stakeholders. The integration of AI into education presents both opportunities and challenges. As Matthew Lynch of The Tech Edvocate notes, universit
 The Prototype: American Scientists Are Looking For Jobs AbroadApr 26, 2025 am 11:07 AM
The Prototype: American Scientists Are Looking For Jobs AbroadApr 26, 2025 am 11:07 AMThe development of scientific research and technology in the United States may face challenges, perhaps due to budget cuts. According to Nature, the number of American scientists applying for overseas jobs increased by 32% from January to March 2025 compared with the same period in 2024. A previous poll showed that 75% of the researchers surveyed were considering searching for jobs in Europe and Canada. Hundreds of NIH and NSF grants have been terminated in the past few months, with NIH’s new grants down by about $2.3 billion this year, a drop of nearly one-third. The leaked budget proposal shows that the Trump administration is considering sharply cutting budgets for scientific institutions, with a possible reduction of up to 50%. The turmoil in the field of basic research has also affected one of the major advantages of the United States: attracting overseas talents. 35
 All About Open AI's Latest GPT 4.1 Family - Analytics VidhyaApr 26, 2025 am 10:19 AM
All About Open AI's Latest GPT 4.1 Family - Analytics VidhyaApr 26, 2025 am 10:19 AMOpenAI unveils the powerful GPT-4.1 series: a family of three advanced language models designed for real-world applications. This significant leap forward offers faster response times, enhanced comprehension, and drastically reduced costs compared t


Hot AI Tools

Undresser.AI Undress
AI-powered app for creating realistic nude photos

AI Clothes Remover
Online AI tool for removing clothes from photos.

Undress AI Tool
Undress images for free

Clothoff.io
AI clothes remover

Video Face Swap
Swap faces in any video effortlessly with our completely free AI face swap tool!

Hot Article
Hot Tools

mPDF
mPDF is a PHP library that can generate PDF files from UTF-8 encoded HTML. The original author, Ian Back, wrote mPDF to output PDF files "on the fly" from his website and handle different languages. It is slower than original scripts like HTML2FPDF and produces larger files when using Unicode fonts, but supports CSS styles etc. and has a lot of enhancements. Supports almost all languages, including RTL (Arabic and Hebrew) and CJK (Chinese, Japanese and Korean). Supports nested block-level elements (such as P, DIV),

SublimeText3 Linux new version
SublimeText3 Linux latest version

VSCode Windows 64-bit Download
A free and powerful IDE editor launched by Microsoft

SAP NetWeaver Server Adapter for Eclipse
Integrate Eclipse with SAP NetWeaver application server.

Safe Exam Browser
Safe Exam Browser is a secure browser environment for taking online exams securely. This software turns any computer into a secure workstation. It controls access to any utility and prevents students from using unauthorized resources.

