



In this work, we constructed a dense occupancy raster dataset through multi-frame point clouds and designed a three-dimensional occupancy raster network based on the transformer's 2D-3D Unet structure. We are honored that our article has been included in ICCV 2023. The project code is now open source and everyone is welcome to try it.
arXiv: https://arxiv.org/pdf/2303.09551.pdf
Code: https://github.com/weiyithu/SurroundOcc
Homepage link: https://weiyithu.github.io/SurroundOcc/
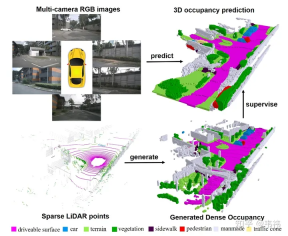
I have been looking for a job like crazy recently and have no time to write. I just recently submitted camera-ready as a working person. In the end, I thought it would be better to write a Zhihu summary. In fact, the introduction of the article is already well written by various public accounts, and thanks to their publicity, you can directly refer to the Heart of Autonomous Driving: nuScenes SOTA! SurroundOcc: Pure visual 3D occupancy prediction network for autonomous driving (Tsinghua & Tianda). In general, the contribution is divided into two parts. One part is how to use multi-frame lidar point clouds to build a dense occupancy data set, and the other part is how to design a network for occupancy prediction. In fact, the contents of both parts are relatively straightforward and easy to understand. If you don’t understand anything, you can always ask me. So in this article, I want to talk about something other than the thesis. One is how to improve the current solution to make it easier to deploy, and the other is the future development direction.
Deployment
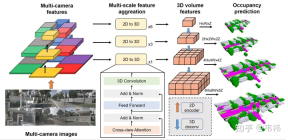
Whether a network is easy to deploy mainly depends on whether it is difficult to deploy. Operators implemented on the board end, the two more difficult operators in the SurroundOcc method are the transformer layer and 3D convolution.
The main function of the transformer is to convert 2D features into 3D space. In fact, this part can also be implemented using LSS, Homography or even mlp, so this part of the network can be modified according to the implemented solution. But as far as I know, the transformer solution is not sensitive to calibration and has better performance among several solutions. It is recommended that those who have the ability to implement transformer deployment should use the original solution.
For 3D convolution, you can replace it with 2D convolution. Here you need to reshape the original 3D feature of (C, H, W, Z) into (C* Z, H, W) 2D feature, then you can use 2D convolution for feature extraction. In the final occupancy prediction step, it is reshaped back to (C, H, W, Z) and supervised. On the other hand, skip connection consumes more video memory due to its larger resolution. During deployment, it can be removed and only the minimum resolution layer will be left. Our experiments found that these two operations in 3D convolution will have some drop points on nuscenes, but the scale of the industry's data set is much larger than nuscenes. Sometimes some conclusions will change, and the drop points should be less or even none.

In terms of dataset construction, the most time-consuming step is Poisson reconstruction. We use the nuscenes data set, which uses 32-line lidar for collection. Even when using multi-frame stitching technology, we found that there are still many holes in the stitched point cloud. Therefore, we employed Poisson reconstruction to fill these holes. However, many lidar point clouds currently used in the industry are relatively dense, such as M1, RS128, etc. Therefore, in this case, the Poisson reconstruction step can be omitted to speed up the construction of the data set
On the other hand, SurroundOcc uses the three-dimensional target detection frame marked in nuscenes to combine the static scene and Dynamic objects are separated. However, in actual application, autolabel, which is a large three-dimensional target detection & tracking model, can be used to obtain the detection frame of each object in the entire sequence. Compared with manually annotated labels, the results produced by using large models will definitely have some errors. The most direct manifestation is the phenomenon of ghosting after splicing multiple frames of objects. But in fact, occupation does not have such high requirements for the shape of objects. As long as the position of the detection frame is relatively accurate, it can meet the requirements.
Future Direction
The current method still relies on lidar to provide occupancy supervision signals, but many cars, especially some low-level assisted driving cars, do not have lidar. These cars A large amount of RGB data can be returned through shadow mode, so a future direction is whether we can only use RGB for self-supervised learning. A natural solution is to use NeRF for supervision. Specifically, the front backbone part remains unchanged to obtain an occupancy prediction, and then voxel rendering is used to obtain the RGB from each camera perspective, and the loss is done with the true value RGB in the training set. Create a supervisory signal. But it is a pity that this straightforward method did not work very well when we tried it. The possible reason is that the range of the outdoor scene is too large, and the nerf may not be able to hold it, but it is also possible that we have not adjusted it properly. You can try it again. .
The other direction is timing & occupation flow. In fact, occupation flow is far more useful for downstream tasks than single-frame occupation. During ICCV, we didn’t have time to compile the data set of occupation flow, and when we published the paper, we had to compare many flow baselines, so we didn’t work on it at that time. For timing networks, you can refer to the solutions of BEVFormer and BEVDet4D, which are relatively simple and effective. The difficult part is still the flow data set. General objects can be calculated using the three-dimensional target detection frame of sequence, but special-shaped objects such as small animal plastic bags may need to be annotated using the scene flow method.

The content that needs to be rewritten is: Original link: https://mp.weixin.qq.com/s/_crun60B_lOz6_maR0Wyug
The above is the detailed content of SurroundOcc: Surround 3D occupancy grid new SOTA!. For more information, please follow other related articles on the PHP Chinese website!

 A Comprehensive Guide to ExtrapolationApr 15, 2025 am 11:38 AM
A Comprehensive Guide to ExtrapolationApr 15, 2025 am 11:38 AMIntroduction Suppose there is a farmer who daily observes the progress of crops in several weeks. He looks at the growth rates and begins to ponder about how much more taller his plants could grow in another few weeks. From th
 The Rise Of Soft AI And What It Means For Businesses TodayApr 15, 2025 am 11:36 AM
The Rise Of Soft AI And What It Means For Businesses TodayApr 15, 2025 am 11:36 AMSoft AI — defined as AI systems designed to perform specific, narrow tasks using approximate reasoning, pattern recognition, and flexible decision-making — seeks to mimic human-like thinking by embracing ambiguity. But what does this mean for busine
 Evolving Security Frameworks For The AI FrontierApr 15, 2025 am 11:34 AM
Evolving Security Frameworks For The AI FrontierApr 15, 2025 am 11:34 AMThe answer is clear—just as cloud computing required a shift toward cloud-native security tools, AI demands a new breed of security solutions designed specifically for AI's unique needs. The Rise of Cloud Computing and Security Lessons Learned In th
 3 Ways Generative AI Amplifies Entrepreneurs: Beware Of Averages!Apr 15, 2025 am 11:33 AM
3 Ways Generative AI Amplifies Entrepreneurs: Beware Of Averages!Apr 15, 2025 am 11:33 AMEntrepreneurs and using AI and Generative AI to make their businesses better. At the same time, it is important to remember generative AI, like all technologies, is an amplifier – making the good great and the mediocre, worse. A rigorous 2024 study o
 New Short Course on Embedding Models by Andrew NgApr 15, 2025 am 11:32 AM
New Short Course on Embedding Models by Andrew NgApr 15, 2025 am 11:32 AMUnlock the Power of Embedding Models: A Deep Dive into Andrew Ng's New Course Imagine a future where machines understand and respond to your questions with perfect accuracy. This isn't science fiction; thanks to advancements in AI, it's becoming a r
 Is Hallucination in Large Language Models (LLMs) Inevitable?Apr 15, 2025 am 11:31 AM
Is Hallucination in Large Language Models (LLMs) Inevitable?Apr 15, 2025 am 11:31 AMLarge Language Models (LLMs) and the Inevitable Problem of Hallucinations You've likely used AI models like ChatGPT, Claude, and Gemini. These are all examples of Large Language Models (LLMs), powerful AI systems trained on massive text datasets to
 The 60% Problem — How AI Search Is Draining Your TrafficApr 15, 2025 am 11:28 AM
The 60% Problem — How AI Search Is Draining Your TrafficApr 15, 2025 am 11:28 AMRecent research has shown that AI Overviews can cause a whopping 15-64% decline in organic traffic, based on industry and search type. This radical change is causing marketers to reconsider their whole strategy regarding digital visibility. The New
 MIT Media Lab To Put Human Flourishing At The Heart Of AI R&DApr 15, 2025 am 11:26 AM
MIT Media Lab To Put Human Flourishing At The Heart Of AI R&DApr 15, 2025 am 11:26 AMA recent report from Elon University’s Imagining The Digital Future Center surveyed nearly 300 global technology experts. The resulting report, ‘Being Human in 2035’, concluded that most are concerned that the deepening adoption of AI systems over t


Hot AI Tools

Undresser.AI Undress
AI-powered app for creating realistic nude photos

AI Clothes Remover
Online AI tool for removing clothes from photos.

Undress AI Tool
Undress images for free

Clothoff.io
AI clothes remover

AI Hentai Generator
Generate AI Hentai for free.

Hot Article
Hot Tools

Zend Studio 13.0.1
Powerful PHP integrated development environment

DVWA
Damn Vulnerable Web App (DVWA) is a PHP/MySQL web application that is very vulnerable. Its main goals are to be an aid for security professionals to test their skills and tools in a legal environment, to help web developers better understand the process of securing web applications, and to help teachers/students teach/learn in a classroom environment Web application security. The goal of DVWA is to practice some of the most common web vulnerabilities through a simple and straightforward interface, with varying degrees of difficulty. Please note that this software

EditPlus Chinese cracked version
Small size, syntax highlighting, does not support code prompt function

SublimeText3 Mac version
God-level code editing software (SublimeText3)

Safe Exam Browser
Safe Exam Browser is a secure browser environment for taking online exams securely. This software turns any computer into a secure workstation. It controls access to any utility and prevents students from using unauthorized resources.

