


This tutorial enhances a genetic algorithm simulation by adding features like elite highlighting, increased obstacle complexity, a "Reached" counter, and crossover breeding. Let's break down the improvements.
Part 1: Visual Enhancements and Obstacle Complexity
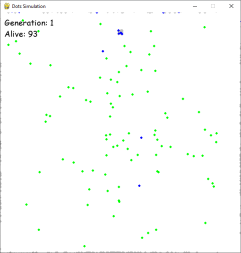
The simulation is upgraded to visually distinguish elite dots (those performing best in the previous generation) by coloring them blue. This is achieved by adding an is_elite boolean parameter to the Dot class's draw method and conditionally applying the blue color. The Population class's draw method is modified to pass this boolean based on whether a dot is in the elites list.
Obstacle generation is refactored for greater flexibility. Obstacle and Goal classes are moved to a separate obstacles.py file, promoting cleaner code organization. A constants.py file is introduced to hold global variables like screen dimensions and population size, preventing redundancy across files. Multiple obstacle configurations (OBSTACLES0, OBSTACLES1, OBSTACLES2, OBSTACLES3, OBSTACLES4, OBSTACLES5) are defined in obstacles.py, allowing easy switching between different challenge levels. The main script imports these configurations and selects the desired one. A check is added to ensure the goal is always present, even when using obstacle lists generated via list comprehensions (like OBSTACLES4).
A "Reached" counter is added to display the number of dots that successfully reached the goal in the previous generation. This is implemented by modifying the generate_next_generation method in the Population class to count and return this value. The main loop then displays this count on the screen.

Part 2: Implementing Single-Point Crossover
The simulation transitions from replication to single-point crossover for offspring generation. A crossover class method is added to the Dot class. This method takes two parent dots as input, selects a random crossover point, and creates two offspring by combining portions of each parent's movement sequence (represented as a list of direction vectors). The generate_next_generation method is updated to utilize this crossover method, generating pairs of offspring instead of single clones. Mutation continues to be applied to the offspring.

The improved simulation offers enhanced visualization, adjustable difficulty, and a more sophisticated breeding mechanism, making it a more robust and insightful example of a genetic algorithm. Future improvements mentioned include save/load functionality and speed optimization. The author also encourages joining their Discord community for further collaboration.
The above is the detailed content of Dots Simulation using Genetic Algorithm - Part 2. For more information, please follow other related articles on the PHP Chinese website!

 Python vs. C : Learning Curves and Ease of UseApr 19, 2025 am 12:20 AM
Python vs. C : Learning Curves and Ease of UseApr 19, 2025 am 12:20 AMPython is easier to learn and use, while C is more powerful but complex. 1. Python syntax is concise and suitable for beginners. Dynamic typing and automatic memory management make it easy to use, but may cause runtime errors. 2.C provides low-level control and advanced features, suitable for high-performance applications, but has a high learning threshold and requires manual memory and type safety management.
 Python vs. C : Memory Management and ControlApr 19, 2025 am 12:17 AM
Python vs. C : Memory Management and ControlApr 19, 2025 am 12:17 AMPython and C have significant differences in memory management and control. 1. Python uses automatic memory management, based on reference counting and garbage collection, simplifying the work of programmers. 2.C requires manual management of memory, providing more control but increasing complexity and error risk. Which language to choose should be based on project requirements and team technology stack.
 Python for Scientific Computing: A Detailed LookApr 19, 2025 am 12:15 AM
Python for Scientific Computing: A Detailed LookApr 19, 2025 am 12:15 AMPython's applications in scientific computing include data analysis, machine learning, numerical simulation and visualization. 1.Numpy provides efficient multi-dimensional arrays and mathematical functions. 2. SciPy extends Numpy functionality and provides optimization and linear algebra tools. 3. Pandas is used for data processing and analysis. 4.Matplotlib is used to generate various graphs and visual results.
 Python and C : Finding the Right ToolApr 19, 2025 am 12:04 AM
Python and C : Finding the Right ToolApr 19, 2025 am 12:04 AMWhether to choose Python or C depends on project requirements: 1) Python is suitable for rapid development, data science, and scripting because of its concise syntax and rich libraries; 2) C is suitable for scenarios that require high performance and underlying control, such as system programming and game development, because of its compilation and manual memory management.
 Python for Data Science and Machine LearningApr 19, 2025 am 12:02 AM
Python for Data Science and Machine LearningApr 19, 2025 am 12:02 AMPython is widely used in data science and machine learning, mainly relying on its simplicity and a powerful library ecosystem. 1) Pandas is used for data processing and analysis, 2) Numpy provides efficient numerical calculations, and 3) Scikit-learn is used for machine learning model construction and optimization, these libraries make Python an ideal tool for data science and machine learning.
 Learning Python: Is 2 Hours of Daily Study Sufficient?Apr 18, 2025 am 12:22 AM
Learning Python: Is 2 Hours of Daily Study Sufficient?Apr 18, 2025 am 12:22 AMIs it enough to learn Python for two hours a day? It depends on your goals and learning methods. 1) Develop a clear learning plan, 2) Select appropriate learning resources and methods, 3) Practice and review and consolidate hands-on practice and review and consolidate, and you can gradually master the basic knowledge and advanced functions of Python during this period.
 Python for Web Development: Key ApplicationsApr 18, 2025 am 12:20 AM
Python for Web Development: Key ApplicationsApr 18, 2025 am 12:20 AMKey applications of Python in web development include the use of Django and Flask frameworks, API development, data analysis and visualization, machine learning and AI, and performance optimization. 1. Django and Flask framework: Django is suitable for rapid development of complex applications, and Flask is suitable for small or highly customized projects. 2. API development: Use Flask or DjangoRESTFramework to build RESTfulAPI. 3. Data analysis and visualization: Use Python to process data and display it through the web interface. 4. Machine Learning and AI: Python is used to build intelligent web applications. 5. Performance optimization: optimized through asynchronous programming, caching and code
 Python vs. C : Exploring Performance and EfficiencyApr 18, 2025 am 12:20 AM
Python vs. C : Exploring Performance and EfficiencyApr 18, 2025 am 12:20 AMPython is better than C in development efficiency, but C is higher in execution performance. 1. Python's concise syntax and rich libraries improve development efficiency. 2.C's compilation-type characteristics and hardware control improve execution performance. When making a choice, you need to weigh the development speed and execution efficiency based on project needs.


Hot AI Tools

Undresser.AI Undress
AI-powered app for creating realistic nude photos

AI Clothes Remover
Online AI tool for removing clothes from photos.

Undress AI Tool
Undress images for free

Clothoff.io
AI clothes remover

Video Face Swap
Swap faces in any video effortlessly with our completely free AI face swap tool!

Hot Article
Hot Tools

Dreamweaver CS6
Visual web development tools

Safe Exam Browser
Safe Exam Browser is a secure browser environment for taking online exams securely. This software turns any computer into a secure workstation. It controls access to any utility and prevents students from using unauthorized resources.

SAP NetWeaver Server Adapter for Eclipse
Integrate Eclipse with SAP NetWeaver application server.

SublimeText3 Chinese version
Chinese version, very easy to use

Atom editor mac version download
The most popular open source editor

