

The first pure visual static reconstruction of autonomous driving


Purely visual annotation scheme mainly uses vision plus some data from GPS, IMU and wheel speed sensors for dynamic annotation. Of course, for mass production scenarios, it doesn’t have to be pure vision. Some mass-produced vehicles will have sensors like solid-state radar (AT128). If we create a data closed loop from the perspective of mass production and use all these sensors, we can effectively solve the problem of labeling dynamic objects. But there is no solid-state radar in our plan. Therefore, we will introduce this most common mass production labeling solution.
The core of the purely visual annotation solution lies in high-precision pose reconstruction. We use the Structure from Motion (SFM) pose reconstruction scheme to ensure reconstruction accuracy. However, traditional SFM, especially incremental SFM, is very slow and expensive in computational complexity. The computational complexity is O(n^4), where n is the number of images. This kind of reconstruction efficiency is unacceptable for data annotation of large-scale models. We have made some improvements to the SFM solution.
The improved clip reconstruction is mainly divided into three modules: 1) Use multi-sensor data, GNSS, IMU and wheel speedometer to construct pose_graph optimization and obtain the initial pose. We call this algorithm For Wheel-Imu-GNSS-Odometry (WIGO); 2) Feature extraction and matching of images, and triangulation directly using the initialized pose to obtain the initial 3D points; 3) Finally, a global BA (Bundle Adjustment) is performed. On the one hand, our solution avoids incremental SFM. On the other hand, different clips can implement parallel operations, thus greatly improving the efficiency of pose reconstruction. Compared with the existing incremental reconstruction, Efficiency improvements of 10 to 20 times can be achieved.
During the single reconstruction process, our solution has also made some optimizations. For example, we use Learning based features (Superpoint and Superglue), one is the feature point and the other is the matching method , to replace the traditional SIFT key points. The advantage of learning NN-Features is that on the one hand, rules can be designed in a data-driven manner to meet some customized needs and improve the robustness in some weak textures and dark lighting conditions; on the other hand, it can improve Efficiency of keypoint detection and matching. We have done some comparative experiments and found that the success rate of NN-features in night scenes will be approximately 4 times higher than that of SFIT, from 20% to 80%.
After obtaining the reconstruction result of a single Clip, we will aggregate multiple clips. Different from the existing HDmap mapping structure matching scheme, in order to ensure the accuracy of aggregation, we adopt feature point level aggregation, that is, the aggregation constraints between clips are carried out through the matching of feature points. This operation is similar to loop closure detection in SLAM. First, GPS is used to determine some candidate matching frames; then, feature points and descriptions are used to match images; finally, these loop closure constraints are combined to construct a global BA (Bundle Adjustment) and optimize. At present, the accuracy and RTE index of our solution far exceed some existing visual SLAM or mapping solutions.
Experiment: Use the colmap cuda version, use 180 pictures, 3848*2168 resolution, manually set internal parameters, and use the default settings for the rest. The sparse reconstruction takes about 15 minutes, and the entire dense reconstruction takes an extremely long time (1- 2h)

Reconstruction result statistics

Feature point diagram
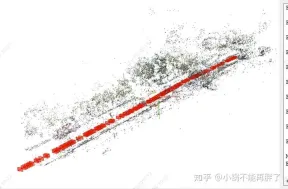
sparse reconstruction effect

Overall effect of the straight section

Ground cone effect

Effect of speed limit sign at height

Effect of intersection zebra crossing
It is easy to not converge, I tried another set of images There is no convergence: static ego filtering, forming a clip every 50-100m according to the movement of the vehicle; dynamic point filtering in high-dynamic scenes, tunnel scene pose
Use circumferential and panoramic multi-cameras: feature point matching map optimization, internal and external parameter optimization items, and use of existing odom.
https://github.com/colmap/colmap/blob/main/pycolmap/custom_bundle_adjustment.py
pyceres.solve(solver_options, bundle_adjuster.problem, summary)
3DGS accelerates dense reconstruction, otherwise it will take too long to accept
The above is the detailed content of The first pure visual static reconstruction of autonomous driving. For more information, please follow other related articles on the PHP Chinese website!

 Tesla's Robovan Was The Hidden Gem In 2024's Robotaxi TeaserApr 22, 2025 am 11:48 AM
Tesla's Robovan Was The Hidden Gem In 2024's Robotaxi TeaserApr 22, 2025 am 11:48 AMSince 2008, I've championed the shared-ride van—initially dubbed the "robotjitney," later the "vansit"—as the future of urban transportation. I foresee these vehicles as the 21st century's next-generation transit solution, surpas
 Sam's Club Bets On AI To Eliminate Receipt Checks And Enhance RetailApr 22, 2025 am 11:29 AM
Sam's Club Bets On AI To Eliminate Receipt Checks And Enhance RetailApr 22, 2025 am 11:29 AMRevolutionizing the Checkout Experience Sam's Club's innovative "Just Go" system builds on its existing AI-powered "Scan & Go" technology, allowing members to scan purchases via the Sam's Club app during their shopping trip.
 Nvidia's AI Omniverse Expands At GTC 2025Apr 22, 2025 am 11:28 AM
Nvidia's AI Omniverse Expands At GTC 2025Apr 22, 2025 am 11:28 AMNvidia's Enhanced Predictability and New Product Lineup at GTC 2025 Nvidia, a key player in AI infrastructure, is focusing on increased predictability for its clients. This involves consistent product delivery, meeting performance expectations, and
 Exploring the Capabilities of Google's Gemma 2 ModelsApr 22, 2025 am 11:26 AM
Exploring the Capabilities of Google's Gemma 2 ModelsApr 22, 2025 am 11:26 AMGoogle's Gemma 2: A Powerful, Efficient Language Model Google's Gemma family of language models, celebrated for efficiency and performance, has expanded with the arrival of Gemma 2. This latest release comprises two models: a 27-billion parameter ver
 The Next Wave of GenAI: Perspectives with Dr. Kirk Borne - Analytics VidhyaApr 22, 2025 am 11:21 AM
The Next Wave of GenAI: Perspectives with Dr. Kirk Borne - Analytics VidhyaApr 22, 2025 am 11:21 AMThis Leading with Data episode features Dr. Kirk Borne, a leading data scientist, astrophysicist, and TEDx speaker. A renowned expert in big data, AI, and machine learning, Dr. Borne offers invaluable insights into the current state and future traje
 AI For Runners And Athletes: We're Making Excellent ProgressApr 22, 2025 am 11:12 AM
AI For Runners And Athletes: We're Making Excellent ProgressApr 22, 2025 am 11:12 AMThere were some very insightful perspectives in this speech—background information about engineering that showed us why artificial intelligence is so good at supporting people’s physical exercise. I will outline a core idea from each contributor’s perspective to demonstrate three design aspects that are an important part of our exploration of the application of artificial intelligence in sports. Edge devices and raw personal data This idea about artificial intelligence actually contains two components—one related to where we place large language models and the other is related to the differences between our human language and the language that our vital signs “express” when measured in real time. Alexander Amini knows a lot about running and tennis, but he still
 Jamie Engstrom On Technology, Talent And Transformation At CaterpillarApr 22, 2025 am 11:10 AM
Jamie Engstrom On Technology, Talent And Transformation At CaterpillarApr 22, 2025 am 11:10 AMCaterpillar's Chief Information Officer and Senior Vice President of IT, Jamie Engstrom, leads a global team of over 2,200 IT professionals across 28 countries. With 26 years at Caterpillar, including four and a half years in her current role, Engst
 New Google Photos Update Makes Any Photo Pop With Ultra HDR QualityApr 22, 2025 am 11:09 AM
New Google Photos Update Makes Any Photo Pop With Ultra HDR QualityApr 22, 2025 am 11:09 AMGoogle Photos' New Ultra HDR Tool: A Quick Guide Enhance your photos with Google Photos' new Ultra HDR tool, transforming standard images into vibrant, high-dynamic-range masterpieces. Ideal for social media, this tool boosts the impact of any photo,


Hot AI Tools

Undresser.AI Undress
AI-powered app for creating realistic nude photos

AI Clothes Remover
Online AI tool for removing clothes from photos.

Undress AI Tool
Undress images for free

Clothoff.io
AI clothes remover

Video Face Swap
Swap faces in any video effortlessly with our completely free AI face swap tool!

Hot Article
Hot Tools

ZendStudio 13.5.1 Mac
Powerful PHP integrated development environment

mPDF
mPDF is a PHP library that can generate PDF files from UTF-8 encoded HTML. The original author, Ian Back, wrote mPDF to output PDF files "on the fly" from his website and handle different languages. It is slower than original scripts like HTML2FPDF and produces larger files when using Unicode fonts, but supports CSS styles etc. and has a lot of enhancements. Supports almost all languages, including RTL (Arabic and Hebrew) and CJK (Chinese, Japanese and Korean). Supports nested block-level elements (such as P, DIV),

SublimeText3 Mac version
God-level code editing software (SublimeText3)

PhpStorm Mac version
The latest (2018.2.1) professional PHP integrated development tool

Dreamweaver CS6
Visual web development tools

