
Heim >Technologie-Peripheriegeräte >KI >Wie können Online-Kartierung und Flugbahnvorhersage eng integriert werden?
Wie können Online-Kartierung und Flugbahnvorhersage eng integriert werden?

- PHPznach vorne
- 2024-04-03 12:00:181300Durchsuche
Originaltitel: Producing and Leveraging Online Map Uncertainty in Trajectory Prediction
Papierlink: https://arxiv.org/pdf/2403.16439.pdf
Codelink: https://github.com/alfredgu001324/MapUncertaintyPrediction
Autorenzugehörigkeit: Vector Institute NVIDIA Research, University of Toronto
Thesisidee:
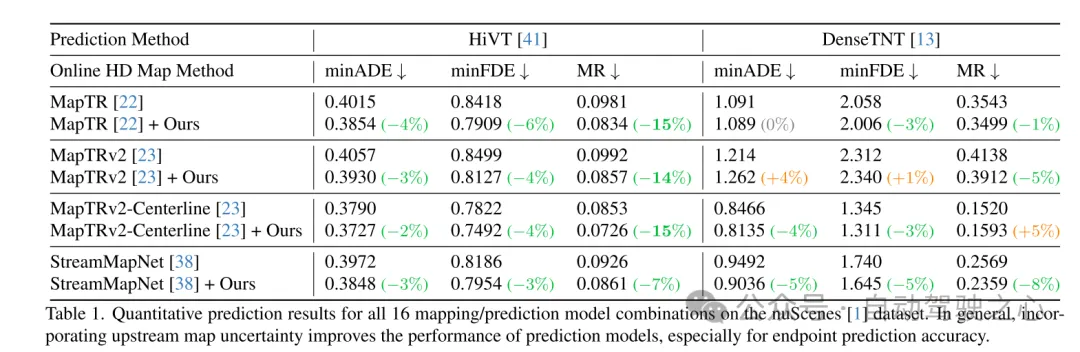
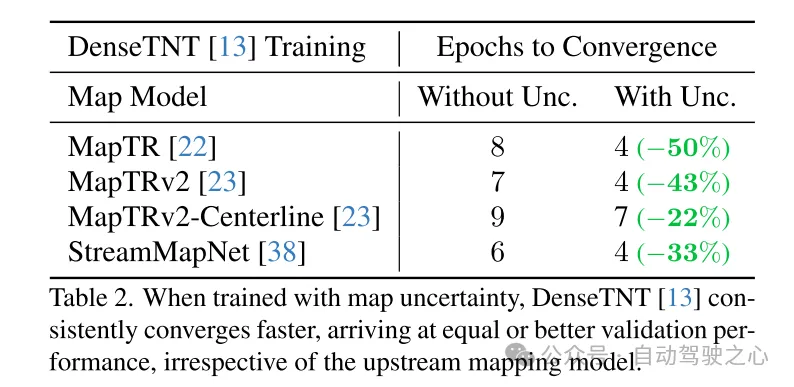
Hochpräzise (HD) Karten spielen eine unverzichtbare Rolle bei der Entwicklung moderner autonomer Fahrzeugtechnologie-Stacks (AV), obwohl die Kennzeichnung und die damit verbundenen Wartungskosten sind hoch. Daher schlagen viele neuere Arbeiten Methoden zur Online-Schätzung von HD-Karten aus Sensordaten vor, was die Integration in Technologie-Stacks für autonomes Fahren erschwert. Insbesondere erzeugen sie keine Unsicherheits- oder Konfidenzschätzungen. Dieses Papier erweitert mehrere hochmoderne Online-Kartenschätzungsmethoden, um zusätzliche Schätzungen der Unsicherheit zu ermöglichen und die Vorhersagekraft des realen nuScenes-Fahrdatensatzes um bis zu 15 % zu verbessern. Dabei stellen wir fest, dass die Einbeziehung der Unsicherheit die Trainingskonvergenz um bis zu 50 % und die Vorhersagekraft des realen nuScenes-Fahrdatensatzes um bis zu 15 % verbessert.
Hauptbeiträge:
Dieses Papier stellt eine allgemeine Beschreibung der Unsicherheit von vektorisierten Karten vor und erweitert viele hochmoderne Online-Kartenschätzungsmethoden, um zusätzlich Unsicherheitsschätzungen auszugeben, ohne die Leistung des reinen Konstruktionsdiagramms zu beeinträchtigen.
Dieser Artikel analysiert empirisch die potenziellen Ursachen der Kartenunsicherheit, bestätigt das mangelnde Vertrauen in aktuelle Kartenschätzmethoden und liefert Informationen für zukünftige Forschungsrichtungen.
In diesem Artikel werden aktuelle Online-Kartenschätzungsmodelle in Kombination mit mehreren hochmodernen Trajektorienvorhersagemethoden erörtert und gezeigt, wie die Leistung und Trainingseigenschaften nachgelagerter Vorhersagemodelle erheblich verbessert und die Trainingskonvergenz beschleunigt werden können, indem die Online-Kartenunsicherheit einbezogen wird auf 50 % und verbessert die Online-Vorhersagegenauigkeit um 15 %.
Netzwerkdesign:
Eine Schlüsselkomponente des autonomen Fahrens ist das Verständnis der statischen Umgebung, zum Beispiel der Straßenführung und des Verkehrs um autonome Fahrzeuge (AVs). Daher wurden hochpräzise (HD) Karten entwickelt, um solche Informationen zu erfassen und bereitzustellen, die semantische Informationen wie Straßengrenzen, Fahrspurtrenner und zentimetergenaue Straßenmarkierungen enthalten. HD-Karten haben sich in den letzten Jahren als unverzichtbar für die Entwicklung und den Einsatz autonomer Fahrzeuge erwiesen und sind heute weit verbreitet [35]. Allerdings ist die Kommentierung und Pflege von HD-Karten im Laufe der Zeit teuer und sie können nur in geofenced Gebieten verwendet werden, was die Skalierbarkeit autonomer Fahrzeuge einschränkt.
Um diese Probleme anzugehen, greifen viele neuere Studien auf die Online-Schätzung hochpräziser (HD-)Karten aus Sensordaten zurück. Im Großen und Ganzen zielen sie darauf ab, die Standorte und Kategorien von Kartenelementen vorherzusagen, normalerweise in Form von Polygonen oder Polylinien, alle Aktuelle Online-Kartenschätzungsmethoden erzeugen jedoch keine relevanten Unsicherheits- oder Konfidenzinformationen aus Kamerabildern und LiDAR-Scans, was problematisch ist, da es zu versteckten Informationen für nachgeschaltete Verbraucher führt. Es wird implizit davon ausgegangen, dass die abgeleiteten Kartenkomponenten deterministisch sind. und etwaige Kartierungsfehler (z. B. falsche Bewegung oder Platzierung von Kartenelementen) können zu fehlerhaftem Downstream-Verhalten führen. Zu diesem Zweck wird in diesem Artikel vorgeschlagen, Kartenunsicherheiten in Online-Kartenschätzmethoden aufzudecken und diese insbesondere in Downstream-Module zu integrieren In der Arbeit wird die Kartenunsicherheit in die Flugbahnvorhersage einbezogen und festgestellt, dass Mapper-Prädiktorsysteme, die die Kartenunsicherheit berücksichtigen (Abbildung 1), deutlich besser sind als solche, die dies nicht tun. Die Leistung ist im Vergleich zum System erheblich verbessert Die Unsicherheit der hochpräzisen Online-Kartenschätzung (HD) und deren Einbindung in die Downstream-Module bringt mehrere Vorteile. Linke Abbildung: Echte HD-Karte und Agentenstandorte. Rechts: Karte mit MapTR-Ausgabe [22] mit zusätzlicher Punktunsicherheit (aufgrund der Vorhersage der linken Straße, bei der die Grenze durch geparkte Fahrzeuge verdeckt ist und die Unsicherheit groß ist)
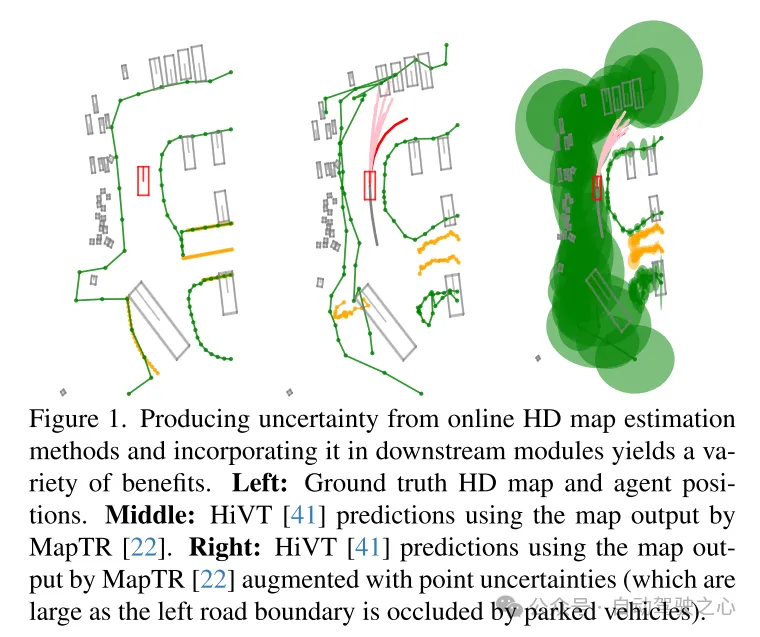
Abbildung 2. Viele Online-High Hochpräzise Vektorkartenschätzungsmethoden kodieren Bilder mit mehreren Kameras und transformieren sie in einen gemeinsamen Merkmalsraum aus der Vogelperspektive (BEV). Diese Arbeit verbessert diese gemeinsame Ausgabestruktur durch Hinzufügen einer Wahrscheinlichkeit Regressionskopf, der jeden Kartenscheitelpunkt zur Auswertung als Laplace-Verteilung modelliert. In diesem Artikel wird das Downstream-Vorhersagemodell weiter erweitert, um die Kartenunsicherheit zu kodieren und den auf dem Graph Neural Network (GNN) basierenden und Transformer-basierten Kartenencoder zu verbessern.
Experimentelle Ergebnisse:
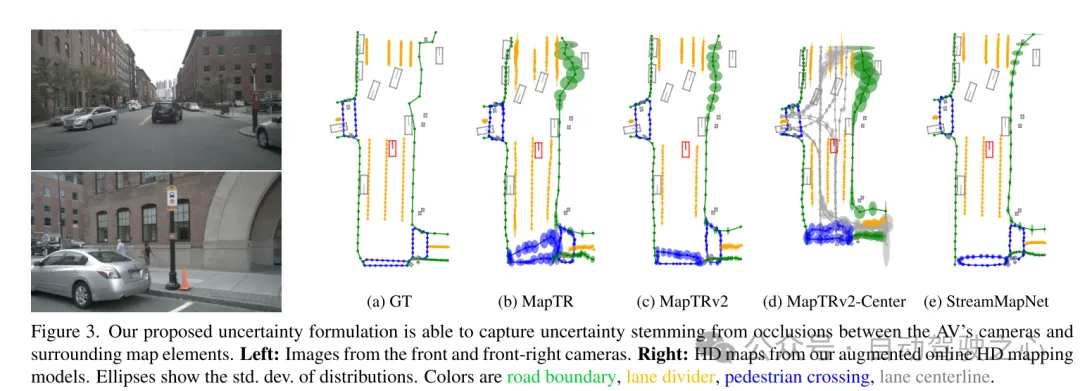
Abbildung 3. Die in diesem Dokument vorgeschlagene Unsicherheitsdarstellung ist in der Lage, die Unsicherheit zu erfassen, die durch Verdeckungen zwischen der Kamera eines autonomen Fahrzeugs (AV) und umgebenden Kartenelementen verursacht wird. Links: Bilder der vorderen und vorderen rechten Kamera. Rechts: HD-Karte, erstellt mit dem in diesem Artikel erweiterten hochpräzisen Online-Kartenmodell. Die Ellipse stellt die Standardabweichung der Verteilung dar. Farben repräsentieren Straßengrenzen, Fahrspurtrenner, Zebrastreifen und Fahrspurmittellinien.
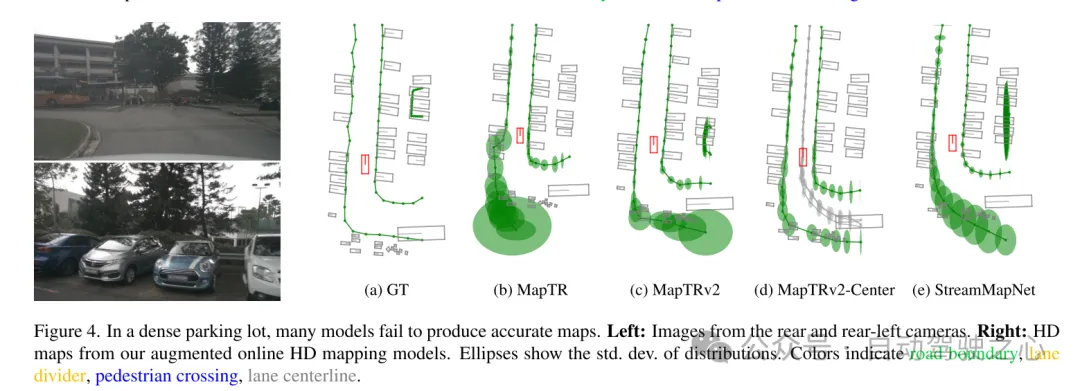
Abbildung 4. Auf einem dichten Parkplatz können viele Modelle keine genauen Karten erstellen. Links: Bilder der hinteren und hinteren linken Kamera. Rechts: HD-Karte, erstellt mit dem in diesem Artikel erweiterten hochpräzisen Online-Kartenmodell. Die Ellipse zeigt die Standardabweichung der Verteilung. Farben repräsentieren Straßengrenzen, Fahrspurtrenner, Zebrastreifen und Fahrspurmittellinien.
Zusammenfassung:
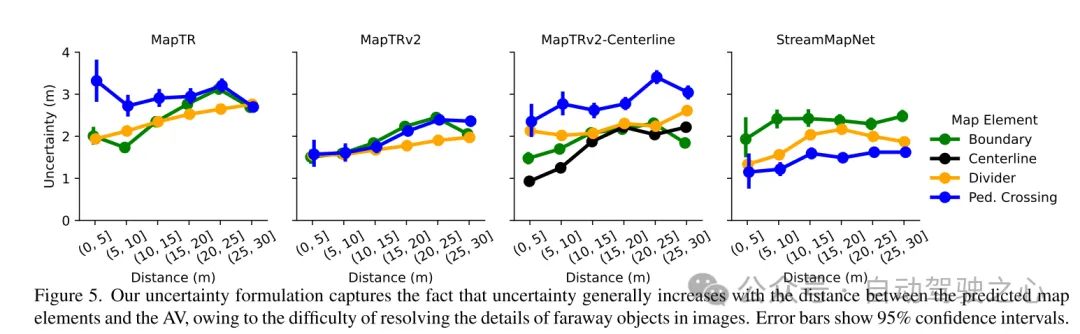
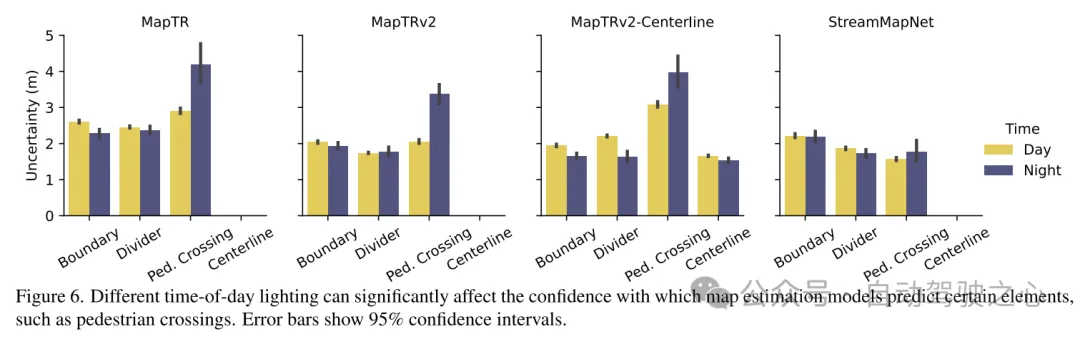
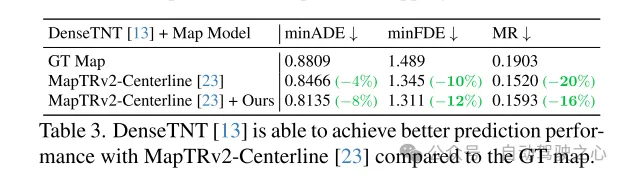
Dieses Papier schlägt eine allgemeine vektorisierte Kartenunsicherheitsformel vor und erweitert eine Vielzahl aktueller Online-Kartenschätzungsmethoden, einschließlich MapTR [22] und MapTRv 2 [23] und StreamMapNet [38], wodurch sie zusätzlich Unsicherheit ausgeben können. Wir analysieren systematisch die resultierende Unsicherheit und stellen fest, dass unser Ansatz viele Unsicherheitsquellen erfasst (Verdeckungen, Entfernung von der Kamera, Tageszeit und Wetter). Schließlich kombiniert dieser Artikel diese Online-Kartenschätzungsmodelle mit modernsten Trajektorienvorhersagemethoden (DenseTNT [13] und HiVT [41]) und zeigt, dass die Einbeziehung der Online-Kartenunsicherheit die Leistung und Trainingseigenschaften der Vorhersagemodelle erheblich verbessert Bis zu 15 % bzw. 50 %. Eine spannende zukünftige Forschungsrichtung besteht darin, diese Unsicherheitsergebnisse zur Messung der Kalibrierung von Kartenmodellen zu verwenden (ähnlich wie [16]). Diese Aufgabe wird jedoch durch die Notwendigkeit einer Fuzzy-Punktmengenübereinstimmung erschwert, was an sich schon ein herausforderndes Problem darstellt.
Zitat:
Gu X, Song G, Gilitschenski I, et al. Erstellen und Nutzen von Online-Kartenunsicherheit bei der Flugbahnvorhersage[J].
Das obige ist der detaillierte Inhalt vonWie können Online-Kartierung und Flugbahnvorhersage eng integriert werden?. Für weitere Informationen folgen Sie bitte anderen verwandten Artikeln auf der PHP chinesischen Website!
In Verbindung stehende Artikel
Mehr sehen- CSS und JS realisieren den wunderschönen Bewegungseffekt der Sternenhimmel-Flugbahn
- Canvas implementiert ein Methodenbeispiel für das Gedrückthalten der Maus und Bewegen, um eine Flugbahn zu zeichnen
- Wie man Elemente in JS entlang einer parabolischen Flugbahn bewegt
- Detaillierte Erläuterung der Entscheidungsplanungstechnologie für autonomes Fahren
- Deep Reinforcement Learning befasst sich mit dem realen autonomen Fahren