
Heim >Technologie-Peripheriegeräte >KI >Top-Ausgabe erschienen! Das Team von Professor Li Yibin von der Shandong-Universität entwickelte einen einfachen und äußerst manövrierfähigen Kompositroboter mit Rädern
Top-Ausgabe erschienen! Das Team von Professor Li Yibin von der Shandong-Universität entwickelte einen einfachen und äußerst manövrierfähigen Kompositroboter mit Rädern

- 王林nach vorne
- 2023-06-08 10:15:511527Durchsuche
Seit der Antike träumen Menschen davon, mobile Mechanismen zu entwickeln, die sich an eine Vielzahl wilder Gelände anpassen können. Mobile Plattform auf Rädernhat eine gute Bewegungsstabilität und Bewegungseffizienz, aber es ist schwierig, sich in unebenem Gelände fortzubewegen. Der Roboter mit Beinen und Beinen hat eine gute Geländeanpassungsfähigkeit und Bewegungsflexibilität, aber seine Bewegungsstabilität und Energieeffizienz müssen verbessert werden.
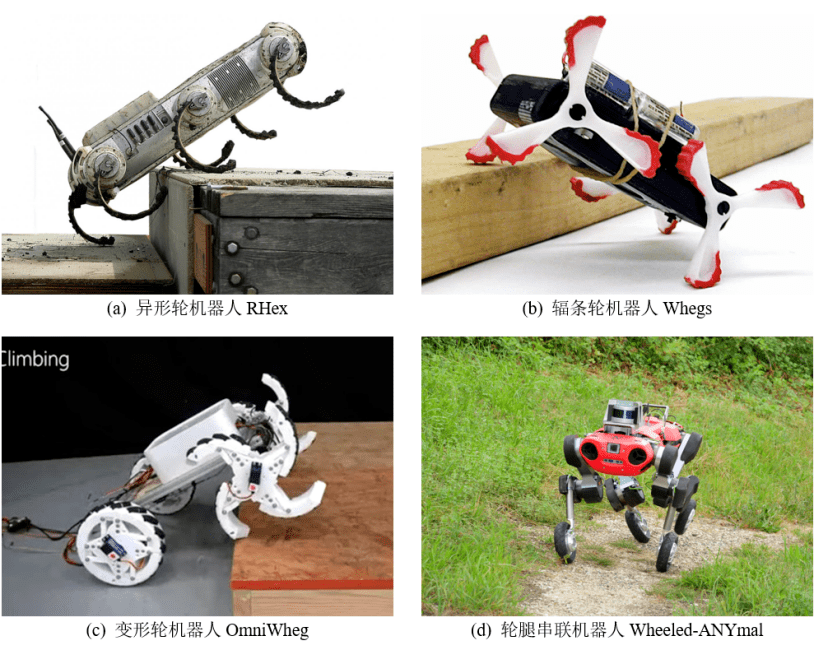
Um die Vorteile der Radbewegung und der Bein-Fuß-Bewegung zu kombinieren, wurde der Rad-Bein-Verbundbewegungsmechanismus geboren. Zu den üblichen zusammengesetzten Rad- und Beinmechanismen gehören hauptsächlich speziell geformte Räder (z. B. RHex), Speichenräder (z. B. Whegs), deformierte Räder (z. B. OmniWheg), Radbeine in Reihe (z. B. Wheeled-ANYmal) usw. wie in Abbildung X dargestellt.
Kürzlich hat das Team von Professor Li Yibin von der Shandong-Universität, Professor Ma Shugen von der Ritsumeikan-Universität, Japan, Professor Liu Jinguo vom Shenyang Institute of Automation der Chinesischen Akademie der Wissenschaften und dem assoziierten Forscher Kong Lingyu vom Zhijiang Laboratory
einen neuen Typ entwickelt eines radbeinigen Verbundroboters namens Q-Whex,Wie in Abbildung 2 dargestellt.
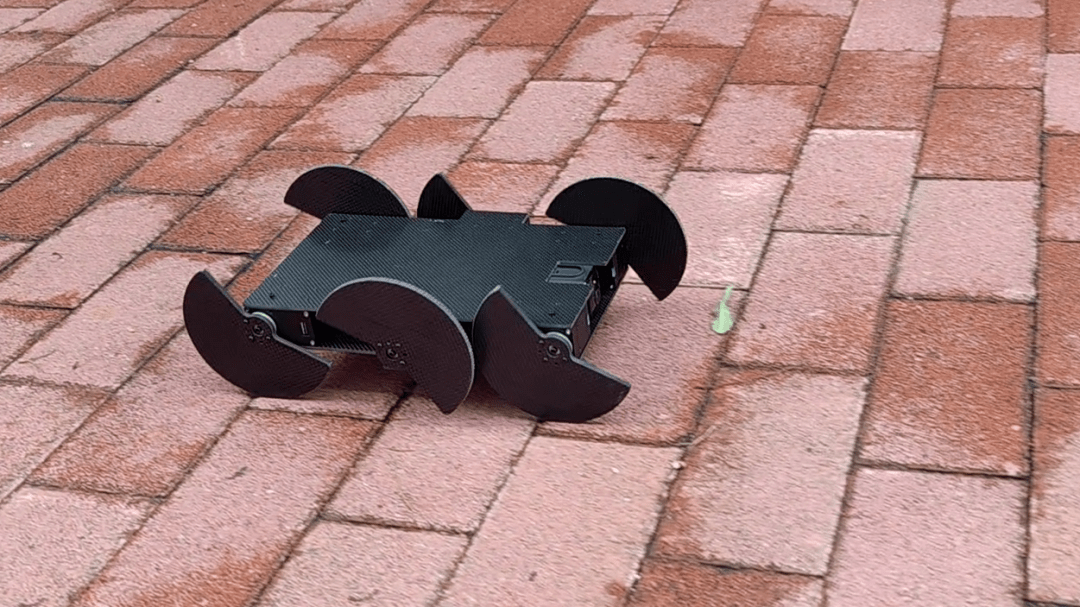
Q-Whex kann sich wie eine mobile Plattform mit Rädern reibungslos auf ebenem Boden bewegen und wie ein Roboter mit Füßen auch über Hindernisse klettern, die höher als seine Fahrgestellhöhe sind. Im Vergleich zu anderen mobilen Verbundrobotern mit Rädern bietet
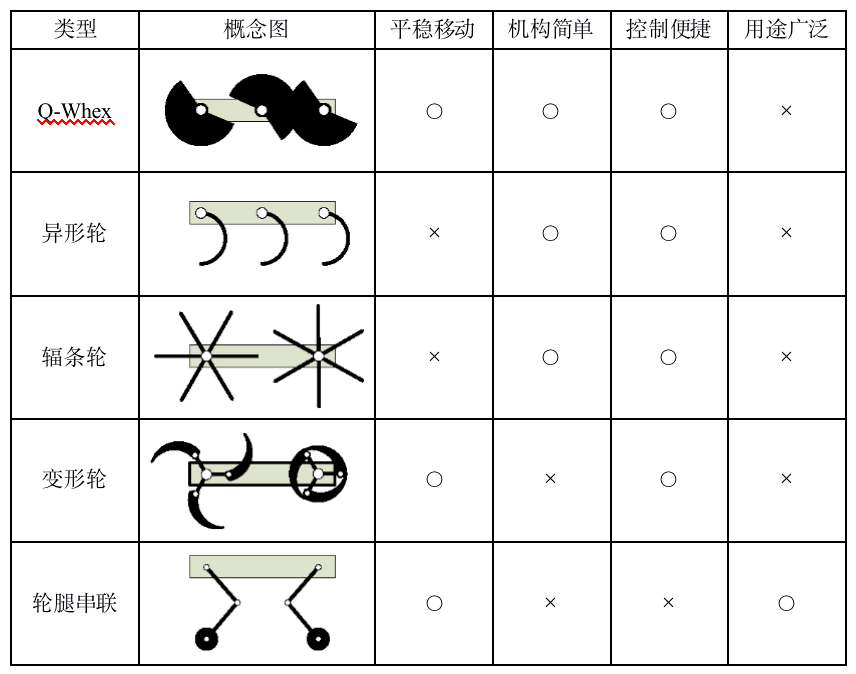
Q-Whex Vorteile in Bezug auf Bewegungsglätte, Mechanismuskomplexität und Steuerungsschwierigkeit, wie in Tabelle 1 gezeigt.
Tabelle 1 Vergleich zwischen Q-Whex und anderen Arten von mobilen Verbundrobotern mit Rädern
▍Einfacher Mechanismus und bequeme Steuerung
Der im Artikel gezeigte Q-Whex-Roboter ist 277,5 mm lang, 204,8 mm breit, 39,5 mm hoch, hat ein Eigengewicht von 2,4 kg und kann bei einer Last von 2,65 kg eine Vorwärtsgeschwindigkeit von 0,44 m/s erreichen. Q-Whex besteht aus einem Hauptkörper und sechs isomorphen sektorförmigen Halbradantriebssystemen. Der Steuerkreis, die IMU, die Batterie und die Kamera sind im Rumpf integriert. Der Antriebsmotor der Radbeinstruktur ist ebenfalls im Rumpf untergebracht. Jedes Halbrad hat eine fächerförmige 210°-Struktur und die Abtriebswelle des Motors ist mit der Lüftermitte verbunden, um eine Rotation zu erreichen. Wenn die fächerförmige Kante den Boden berührt, kann eine Radbewegung erzielt werden.Die Herstellung und Montage von Q-Whex ist sehr einfach, wie in Abbildung 3 dargestellt. Die Komponenten im Inneren des Motors und des Rumpfes werden zwischen zwei Kohlefaserplatten installiert, und jedes Sektorhalbrad besteht ebenfalls aus Kohlefaserplatten.

Die Bewegungssteuerung von Q-Whex ist ebenfalls sehr einfach. Jedes sektorförmige Halbrad dreht sich kontinuierlich, indem der Geschwindigkeitsunterschied zwischen dem linken sektorförmigen Halbrad und dem rechten sektorförmigen Halbrad gesteuert wird Durch die Steuerung des Drehwinkels zwischen den einzelnen sektorförmigen Halbrädern kann die Phasendifferenz unterschiedliche Gangarten erzeugen. Abbildung 4 zeigt die vier typischen Gangarten von Q-Whex.
▍Rad- und Beinkombination, Klettern und Überwinden von Hindernissen
Q-Whex nimmt den dreieckigen Gang an und kann sich auf ebenem Boden wie eine mobile Plattform mit Rädern reibungslos bewegen, wie in Abbildung 5 dargestellt.

Q-Whex kommt auch problemlos mit Schnee, Eis, Kies und anderen Oberflächen zurecht, wie in Abbildung 6 dargestellt.

Mit symmetrischem Gang können Sie einen 32-Grad-Hang auf- und absteigen, wie in Abbildung 7 dargestellt.

Abbildung 7 Q-Whex auf 32-Grad-Neigung
Kann kontinuierliche Stufen erklimmen, wie in Abbildung 8 dargestellt.
Bild 8 Q-Whex klettert kontinuierliche Stufen
Verschiedene unebene Gelände stellen kein Problem dar, wie in Abbildung 9 dargestellt.
Abbildung 9 Q-Whex läuft in unebenem Gelände
▍Symmetrische Konfiguration, keine Angst vor dem Umkippen
Da das strukturelle Design des Q-Whex-Roboters eine symmetrische Konfiguration in den drei Richtungen vorne und hinten, links und rechts sowie oben und unten annimmt, gibt es während seiner Bewegung keinen Unterschied zwischen vorne und hinten und vorne und hinten. Wenn der Roboter während der Fahrt versehentlich umkippt, kann er sich in der „Rückseite nach oben“-Konfiguration weiter vorwärts bewegen und verfügt so über eine hervorragende Absicherung und Fehlertoleranz gegenüber Risiken und Unfällen bei Bewegungen in komplexen Umgebungen. Abbildung 10 zeigt, dass der Roboter während des Klettervorgangs umkippte und den Aufstieg dann in einer „Back-Up“-Haltung beendete.
Bild 10 Q-Whex kann nach dem Umkippen weiterfahren
▍Onboard-Kamera, Fernerkennung
Auf dem Q-Whex-Roboter wurde eine kleine Kameraausrüstung installiert, die die gesammelten Bilder in Echtzeit über WLAN oder 4G-Netzwerk an den Fernbediener übertragen kann. Daher kann Q-Whex unbemannte Erkennungsaufgaben durchführen, wie in Abbildung 11 dargestellt.
Abbildung 11 Q-Whex kann integrierte Kameras zur Fernerkennung verwenden
Sie können die Katze auch aus der Ferne necken, wie in Abbildung 12 gezeigt.
Bild 12 Q-Whex und Katze
Q-Whex ist im Wesentlichen ein neues zusammengesetztes Rad-Bein-Mobilitätskonzept. Seine hohe Manövrierfähigkeit und gute Passierbarkeit resultieren aus der kontinuierlichen Rotation und gegenseitigen Phasenkoordination von sechs unabhängig angetriebenen sektorförmigen Halbrädern. Dieses Konzept kann auf mobile Plattformen angewendet werden, die für industrielle Inspektionen, Logistiktransporte, Felderkennung usw. erforderlich sind. Die geeignete Konfiguration und Größe sollte entsprechend den tatsächlichen Anwendungsanforderungen ausgewählt werden. Der Roboter muss keine komplexen Wahrnehmungs- oder Kontrollstrategien übernehmen und seine Einfachheit in Struktur und Steuerung verbessert die Robustheit und Zuverlässigkeit des Systems.
Der Erstautor des Papiers ist Associate Researcher Zhang Guoteng von der Shandong University, E-Mail:
guoteng@email.sdu.edu.cn.
Link zum Papier:
https://doi.org/10.1002/rob.22186
Das obige ist der detaillierte Inhalt vonTop-Ausgabe erschienen! Das Team von Professor Li Yibin von der Shandong-Universität entwickelte einen einfachen und äußerst manövrierfähigen Kompositroboter mit Rädern. Für weitere Informationen folgen Sie bitte anderen verwandten Artikeln auf der PHP chinesischen Website!
In Verbindung stehende Artikel
Mehr sehen- Technologietrends, die Sie im Jahr 2023 im Auge behalten sollten
- Wie künstliche Intelligenz Rechenzentrumsteams neue Alltagsaufgaben beschert
- Können künstliche Intelligenz oder Automatisierung das Problem der geringen Energieeffizienz in Gebäuden lösen?
- OpenAI-Mitbegründer im Interview mit Huang Renxun: Die Argumentationsfähigkeiten von GPT-4 haben noch nicht die Erwartungen erfüllt
- Dank der OpenAI-Technologie übertrifft Bing von Microsoft Google im Suchverkehr