
Heim >Technologie-Peripheriegeräte >KI >Überblick über die wichtigsten technischen Elemente bei der Entwicklung des intelligenten Fahrens
Überblick über die wichtigsten technischen Elemente bei der Entwicklung des intelligenten Fahrens

- PHPznach vorne
- 2023-05-07 09:01:071432Durchsuche
01 Fusion-Positionierung: Schlüsseldesignelemente für zukunftsorientiertes intelligentes Fahren
Im Zeitalter des Intelligenten Fahren, Autos Verwandeln Sie eine neue Zukunft. Auch die Automobilsoftware und -hardware, die interne Architektur, das Wettbewerbsmuster der Branche und die Wertverteilung in der Industriekette werden tiefgreifende Veränderungen erfahren. Wir glauben, dass das intelligente Fahren im Rahmen dieser Welle des Wandels nacheinander drei Phasen durchlaufen wird: verstärkte Nutzung des assistierten Fahrens, ausgereifte Lösungen für autonomes Fahren und verbesserte Ökologie des autonomen Fahrens und drei Wellen von Möglichkeiten für Hardware, Softwaresysteme und kommerzielle Anwendungen mit sich bringen wird Operationen bzw.
Darunter wird auch die hochpräzise Karte (HD Map = hochauflösende Karte) als Schlüsselfaktor für ihre Navigation und Positionierung große Designänderungen erfahren. Dies spiegelt sich vor allem in den folgenden wichtigen Aspekten wider:
- HD-Karte und Navigationskarte# 🎜🎜 #
Die Navigationskarte liefert die Länge einer Fahrspur und den ungefähren Straßenzustand der jeweiligen Fahrt. Die hochpräzise Karte liefert sehr detaillierte Straßenverhältnisse. Zum Beispiel Verkehrsschilder, Neigung, Fahrspurlinien und die Lage der Fahrspurlinien. Diese werden auf der HD-Karte markiert. In der hochpräzisen Karte ist sogar der Standort einer bestimmten Ampel mit hochpräzisen GPS-Daten markiert. Wenn daher ein unbemanntes Fahrzeug auf der Straße fährt, kann das unbemannte Fahrzeug jedem oben markierten Pfad folgen, solange es über die in der globalen Pfadplanung erstellten Pfade verfügt und diese Pfade dann in Pfade auf Fahrspurlinienebene umwandelt -Definitionskarte. Fahren auf der Mittellinie jeder Fahrspur.
- Die Verbindung zwischen hochpräziser Karte und anderen Modulen #🎜 🎜#
- Hochpräzise Karte und Positionierung#🎜 🎜# Die Hauptaufgabe einer hochpräzisen Karte bei der Positionierung besteht darin, dass sie Informationen über statische Objekte liefert, die zur Positionierung bestimmt wurden. Dann kann das unbemannte Fahrzeug wiederum anhand der Informationen dieser statischen Objekte seine relative Position in der gesamten Karte ermitteln. Wenn diese statischen Objekte ihre eigenen hochpräzisen Breiten- und Längenkoordinaten haben, kann das unbemannte Fahrzeug auf der Grundlage dieser Breiten- und Längenkoordinaten umgekehrt seine eigenen Breiten- und Längenkoordinaten finden und so eine Sensorfusion basierend auf hochpräzisen Karten und Lidar-Kameras realisieren Verfahren. Auf diese Weise können Sie sich nicht mehr auf GPS-Daten verlassen. Denn GPS-Daten weisen ein sehr starkes Rauschen auf, wenn Daten blockiert sind. Natürlich ist die Positionierungsmethode, die auf der Sensorfusion von Radar und Sicht basiert, zu diesem Zeitpunkt noch nicht so genau wie die von Differential-GPS bereitgestellten Daten, aber es handelt sich immer noch um eine Positionierungsmethode. Denn wenn kein GPS-Signal vorhanden ist, kann das Fahrzeug nicht ohne eigene Positionierungsinformationen fahren. Derzeit kann es nur auf andere Positionierungsmethoden zurückgreifen.
- Hochpräzise Karte und Entscheidung
- # 🎜🎜#Die Beziehung zwischen der hochpräzisen Karte und dem Entscheidungsmodul ist noch einfacher. Denn wenn das Fahrzeug die Route kennt, die es in Zukunft nehmen möchte, sowie die Verkehrszeichen und Ampeln sowie Straßeninformationen zu der Route, die es nehmen möchte, kann das Entscheidungsmodul Entscheidungen treffen, die besser zu den aktuellen Straßenverhältnissen passen. Das ist gleichbedeutend damit, dass wir, wenn wir wissen, was in der Zukunft passieren wird, unser aktuelles Verhalten rechtzeitig anpassen können, um mit dem umzugehen, was in der Zukunft passieren wird.
Hochpräzises Karten- und Simulationsmodul
- #🎜🎜 # Die Beziehung zwischen hochauflösenden Karten und Simulationsmodulen ist leichter zu verstehen, denn solange wir das Fahrzeug positionieren oder andere Algorithmen auf einer Karte mit hochpräzisen Kartenstandards überprüfen, werden in tatsächlichen Anwendungen die von uns erhaltenen Informationen verwendet Das Fahrzeug wird dasselbe sein wie die Informationen, die wir in der Simulation erhalten. Mit anderen Worten: Der Code, den wir in der Simulationsumgebung erstellen, kann zu einem großen Teil auch in der realen Umgebung verwendet werden.
- Hochpräzises Karten- und Wahrnehmungsmodul
- HD-Karten- und Steuerungsmodul# 🎜🎜#
- Der Produktionsprozess hochpräziser Karten #🎜 🎜#
- Der hochpräzise Kartenproduktionsprozess unterstützt den hochpräzisen Kartendienst Edge Computing V2X#🎜 🎜 # Die zukünftige Entwicklung des autonomen Fahrens wird sich hauptsächlich in zwei Hauptrichtungen bewegen: Intelligenz und Vernetzung. Der Schwerpunkt liegt auf dem schrittweisen Übergang von der Fahrzeug-End-Intelligenz zur Straßen-End-Intelligenz Cloud-Intelligenz. Für die Bereitstellung hochpräziser Karten sind die wichtigsten Punkte die Reihe von Upgrades und Änderungen, die auf der Cloud-, Straßen- und Fahrzeugseite stattgefunden haben. Unter diesen umfassen Cloud-Änderungen hauptsächlich hochpräzise Kartendienste, Sharded-Datenaggregation, Datenkanten und Daten-Sharding. Das Straßenende umfasst hauptsächlich mehrere Aspekte wie Crowdsourcing-Aktualisierung von Shard-Karten, Kartenversionsverwaltung, Kartenuntervergabe, Optimierung dynamischer Straßeninformationen und Kartennachrichtendienste. Wenn es auf das Auto angewendet wird, erfordert es eine an Subunternehmer vergebene Datenfusion, V2X-Szenenwiederherstellung und hochpräzise Karten-Engines, die entsprechend aktualisiert werden müssen.
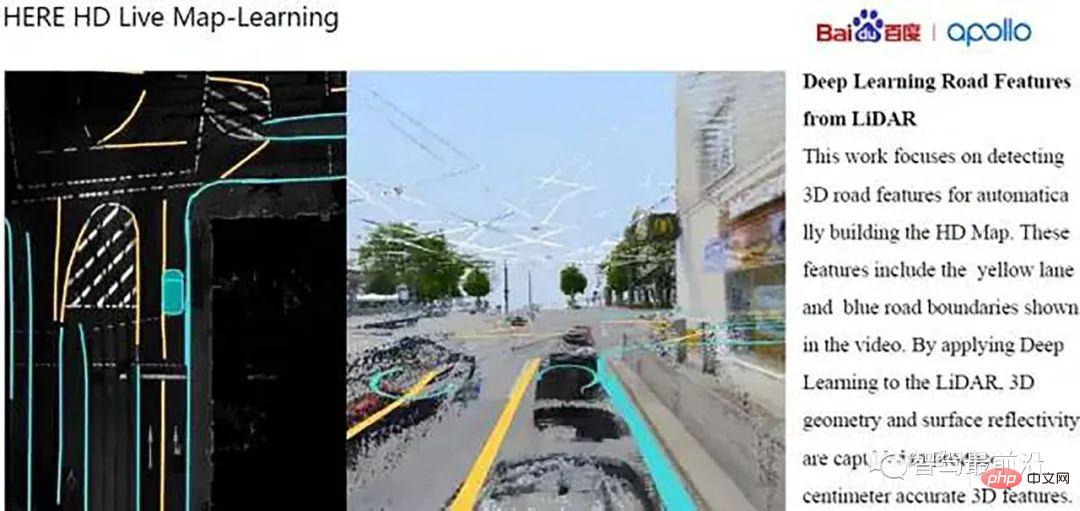
Unbemanntes Fahren Das Wahrnehmungsmodul ist ein relativ komplexes Modul. Weil es viele, viele reale Probleme mit sich bringt. Tatsächlich sind jedoch viele Dinge in den meisten Umgebungen, die wir wahrnehmen, statisch. In dieser statischen Umgebung müssen wir also keine zusätzliche Rechenleistung aufwenden, um Dinge zu berechnen, die im Voraus in der Datenbank gespeichert werden können. Wenn sich beispielsweise ein bestimmtes Gebäude an einem bestimmten Ort befindet, befindet sich das Gebäude, das es jedes Mal sieht, an diesem Punkt, egal wie oft das Fahrzeug zu diesem Ort fährt. Unabhängig von der Wahrnehmungsmethode ändert sich die Position des Gebäudes nicht mit der Wahrnehmung des Fahrzeugs. Dann kann der spezifische Standort solcher Dinge von einem hochpräzisen Kartenerfassungsfahrzeug erfasst und die Daten dann auf der lokalen Festplatte des unbemannten Fahrzeugs gespeichert werden. Dann kann das unbemannte Fahrzeug diese Datenbank verwenden, um jedes Mal, wenn es zu diesem Gebäude fährt, zu erkennen, dass sich dort ein Gebäude befindet, ohne es zu identifizieren. Genau wie beim Positionierungsmodul können wir, wenn wir die hochpräzisen Koordinaten dieses Gebäudes kennen, anhand dieser Koordinaten umgekehrt unsere eigene Position ermitteln. Darüber hinaus kann die Rechenleistung basierend auf der Form des Gebäudes und seinen physikalischen Eigenschaften, die im Voraus vorbereitet wurden, konzentriert werden, um andere dynamische Objekte als dieses Gebäude zu identifizieren.
Der konkrete Inhalt der Kontrolle ist sehr detailliert und mir ist nicht ganz klar darüber. Wenn es aber darum geht, den Lenkwinkel zu steuern, sind die Daten der Mittellinie der Fahrspurlinie, die von der hochpräzisen Karte bereitgestellt werden, unerlässlich. Denn zwar wird die Fahrspurlinie anhand der Kamera identifiziert, die Position der Mittellinie wird dann jedoch anhand dieser Fahrspurlinie ermittelt. Aber diese Dinge sind immer noch nicht so genau wie die Daten, die hochpräzise Karten liefern. Denn die kamerabasierte Spurlinienerkennung erfolgt in Echtzeit und macht mit Sicherheit gelegentlich Fehler. Oder wenn die Fahrspurlinien unklar werden, weil sie längere Zeit nicht gepflegt wurden, dann kann die Kamera die entsprechenden Fahrspurlinieninformationen nicht erkennen. In diesem Fall sind hochpräzise Karten erforderlich. Spurlinien sind ein sehr wichtiges Datenelement beim menschlichen Fahren, daher kann das aktuelle kamerabasierte autonome Fahren nur auf Autobahnen implementiert werden. Denn nur die Fahrbahnlinien auf der Autobahn sind in einem besseren Erhaltungszustand. Lässt sich relativ leicht identifizieren. Im Gegensatz dazu sind Fahrbahnlinien in städtischen Umgebungen nicht gut gepflegt. Daher ist kamerabasiertes autonomes Fahren auf städtischen Straßen noch nicht ratsam.
Der obige iterative Aktualisierungsprozess der Karte kann angewendet werden, um fahrerlose L4/L5-Funktionen zu realisieren und relevante Robotersteuerungsmodi zu generieren. Er kann auch bei der Realisierung von Nutzfahrzeugen verwendet werden, um letztendlich fahrerloses Fahren zu realisieren. Sogar aus der Ferne fahren.
02 Hochpräzise integrierte Positionierungslösung für die Massenproduktion
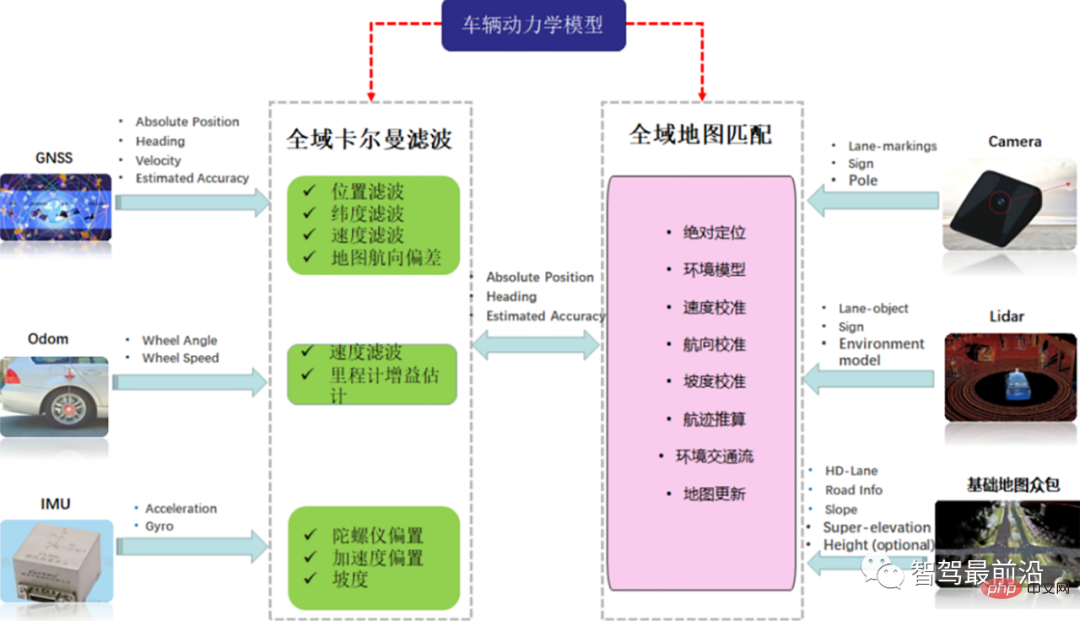
Offensichtlich müssen hochpräzise Karten eine präzise Positionierung erreichen und sich kontinuierlich weiterentwickeln Die funktionale Leistungsfähigkeit muss durch die kontinuierliche Optimierung der eigenen integrierten Positionierungslösung erreicht werden. Dieser Prozess umfasst zwei Hauptsoftwarealgorithmen. Die erste besteht darin, eine dynamische optimale Schätzung der Fahrzeugposition durch erweiterte Kalman-Filterung im Vollzustand durchzuführen. Die zweite besteht darin, mithilfe visueller Sensoren semantische Informationen über die Straßenumgebung zu erhalten und durch präzise Kartenabgleichsalgorithmen genaue Positionen zu ermitteln. Darüber hinaus besteht Bedarf an einer Verbesserung der Wirtschaftlichkeit, Passform und Gesamtleistung. Durch die Entscheidung, fahrzeugmontiertes Terminal RTK in Industriequalität zu konfigurieren: Verwendung eines leistungsstarken 32-Bit-Prozessors in Industriequalität, integriertes hochpräzises RTK-Board, Aufbau eines Kanals mit der Qianxun-Plattform über 3G/4G/5G, Senden von GGA-Informationen an den Differenzserver senden und gleichzeitig Differenzsignale empfangen. Nach dem Empfang der Informationen werden die genauen Positionsinformationen über RS232 ausgegeben.
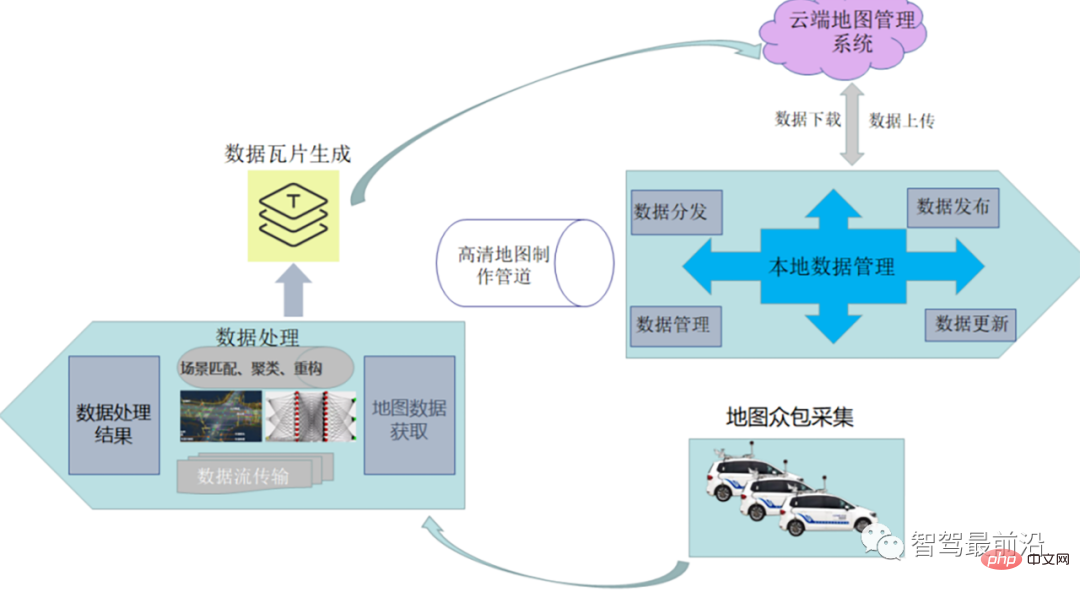
Der wichtigste Prozess hochpräziser Karten ist die Sammlung und Verteilung von Karten-Crowdsourcing. In Bezug auf die Sammlung von Crowdsourcing-Kartendaten kann tatsächlich verstanden werden, dass die von Benutzern über die eigenen Sensoren des selbstfahrenden Fahrzeugs oder andere kostengünstige Sensorhardware gesammelten Straßendaten zur Datenfusion in die Cloud übertragen werden und die Daten dadurch verbessert werden Datenaggregation zur Vervollständigung der Erstellung hochpräziser Karten. Der gesamte Crowdsourcing-Prozess umfasst tatsächlich die Berichterstattung über physische Sensoren, den Abgleich von Kartenszenen, die Clusterbildung von Szenen sowie die Änderungserkennung und -aktualisierung.
Die aktuelle hochpräzise Kartenarchitektur des autonomen Fahrsystems ist immer noch auf einen verteilten Ansatz ausgerichtet. Zu seinen Hauptschwerpunkten gehören die Karten-Crowdsourcing-Sammlung und die Kartenbox-Analyse der Originalinformationen hochpräzise Karte und wie die Karte Fusion von Eingabedaten von anderen Sensoren usw. Beachten wir hier, dass sich die zukünftige Systemarchitektur für autonomes Fahren von verteilten Entwicklungsmethoden hin zu zentralisierten weiterentwickeln wird. Der zentralisierte Ansatz kann in drei oder zwei Schritten betrachtet werden:
Schritt 1: Vollständig zentralisiertes Steuerungsschema im Bereich des intelligenten FahrensDas heißt, Die intelligenten Fahr-ADS- und intelligenten Park-AVP-Systeme werden vollständig zentral gesteuert, und ein zentrales Vorverarbeitungsgerät wird zur Integration, Vorhersage, Planung und anderen Verarbeitungsmethoden für die in den beiden Systemen zu verarbeitenden Informationen verwendet. Die Verarbeitungsmethoden aller Sensor- und Dateneinheiten im Zusammenhang mit intelligentem Fahren und intelligentem Parken (hochpräzise Karten, Lidar, vollständig verteilte Kameras, Millimeterwellenradar usw.) werden entsprechend in die zentrale Domänensteuereinheit integriert.
Schritt 2: Vollständig zentralisiertes Steuerungsschema für den Bereich „Intelligentes Fahren“ und „Intelligentes Cockpit“Diese Methode ist die zweite, um eine vollständig zentralisierte Steuerung zu erreichen Verteilte Methode Die Phase umfasst die Entwicklung aller Funktionen, die vom Domänencontroller für intelligentes Fahren abgedeckt werden (z. B. autonomes Fahren und automatisches Parken) und die Entwicklung aller Funktionen, die von der Domäne des intelligenten Cockpits abgedeckt werden (einschließlich Fahrerüberwachungs-DMS, Audio- und Video-Unterhaltungssystem iHU). , und Instrumentenanzeigesystem IP).
Schritt 3: Vollständig zentralisierte Steuerungslösung für den intelligenten FahrzeugbereichDamit soll eine vollständige Integration von intelligentem Fahren, intelligentem Cockpit und intelligentem Fahrwerk erreicht werden Domänenkontrollmethode. Das heißt, die drei Hauptfunktionen sind in die zentrale Steuereinheit des Fahrzeugs integriert und die spätere Verarbeitung dieser Daten stellt höhere Anforderungen an die Leistung (Rechenleistung, Bandbreite, Speicher usw.) für den Domänencontroller.
Die Entwicklung der hochpräzisen Kartenpositionierung, um die es uns hier geht, wird in Zukunft stärker auf zentralisierte Designmethoden ausgerichtet sein. Wir werden darauf näher eingehen.
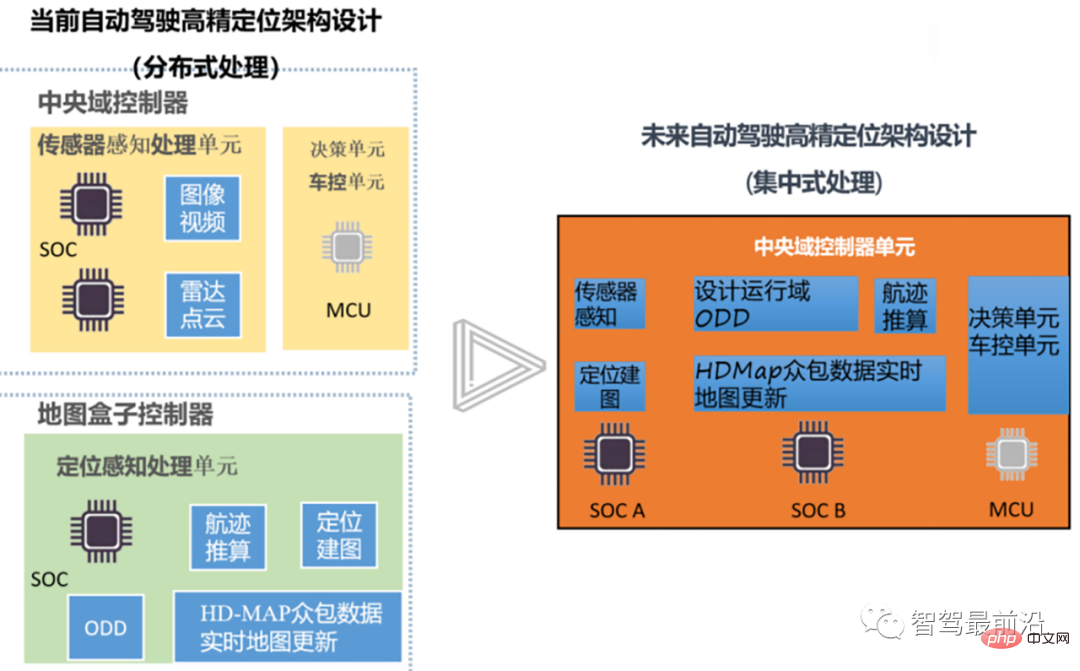
Die obige Abbildung zeigt den architektonischen Entwicklungstrend hochpräziser Karten in der zukünftigen Steuerung autonomer Fahrsysteme. In Zukunft werden autonome Fahrsysteme danach streben, die Sensoreinheit, die Entscheidungseinheit und die Kartenpositionierungseinheit in die zentrale Domänensteuereinheit zu integrieren, um die Abhängigkeit von hochpräzisen Kartenboxen von Grund auf zu reduzieren. Das Design seines Domänencontrollers berücksichtigt vollständig die vollständige Integration des AI-Computing-Chips SOC, des Logic-Computing-Chips MCU und der hochpräzisen Kartenbox.
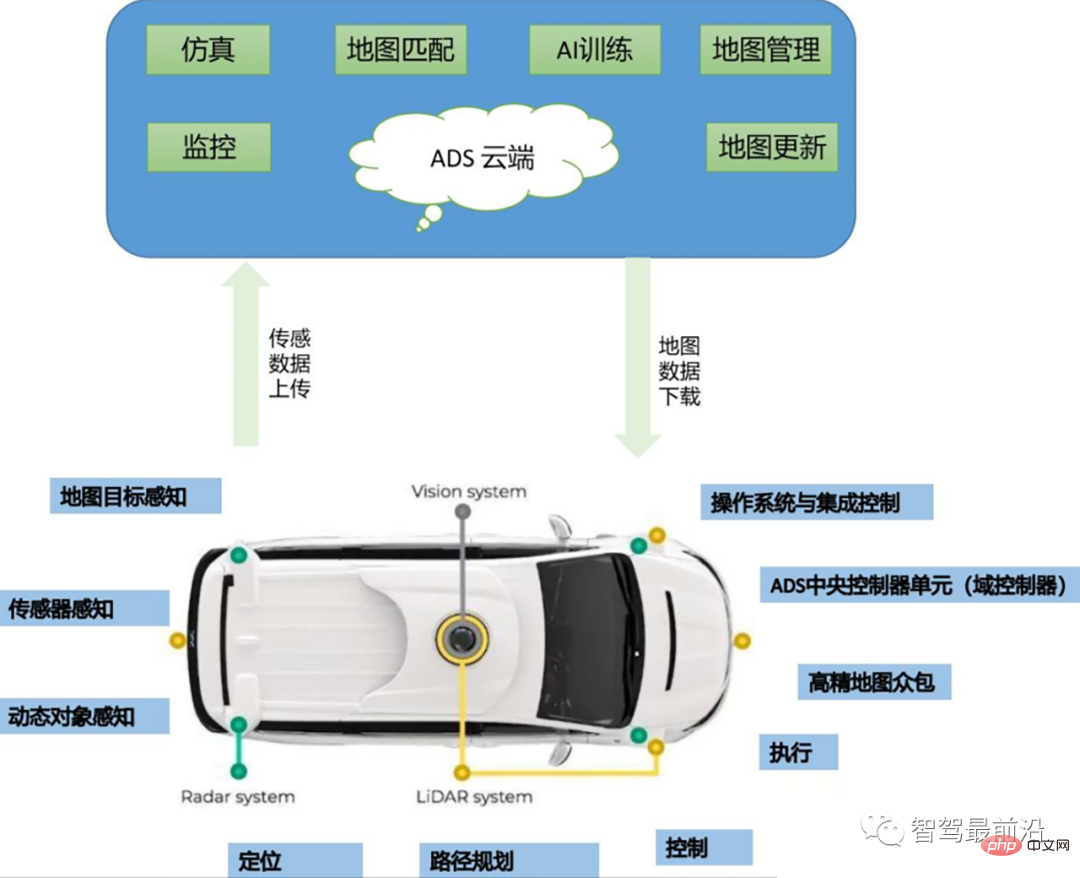
Die obige Abbildung zeigt die entsprechende hochpräzise Kartenerfassungsdatenerfassung, das Datenlernen, das KI-Training, hochpräzise Kartendienste, Simulationen und andere Dienste unter der gesamten Cloud-Steuerungslogik gleichzeitig während der Bewegung und Verifizierungsprozess des Fahrzeugs. Kartendaten werden kontinuierlich durch physische Erfassung, dynamische Datenerfassung, Kartenzielerfassung, Positionierung, Pfadplanung und andere Inhalte aktualisiert, und OTA wird in die Cloud hochgeladen, um die gesamten Crowdsourcing-Daten zu aktualisieren.
Im vorherigen Artikel wurde der Prozess beschrieben, wie hochpräzise Kartendaten relevante Daten generieren, die vom autonomen Fahrcontroller verarbeitet werden können. Wir wissen, dass es sich bei den von hochpräzisen Karten verarbeiteten Originaldaten um EHP-Daten handelt. Die Daten enthalten tatsächlich die folgenden Hauptdaten:
1: Empfangene externe GPS-Standortinformationen;
3: Informationen zur Ermittlung der Straßennetztopologie; 4: Daten über CAN senden;
5: Zusammenführung eines Teils der Navigationsdaten;
Die Daten werden im Allgemeinen direkt von der HDMap-Erfassungsseite über Gigabit-Ethernet verarbeitet und dann in die hochpräzise Kartenzentrale eingegeben Verarbeitungseinheit Die zentrale Verarbeitungseinheit ist das, was wir die „hochpräzise Kartenbox“ nennen. Durch die Weiterverarbeitung der Daten durch die Kartenbox (wir werden diesen eigentlichen Verarbeitungsprozess in einem späteren Artikel ausführlich erläutern) können sie in EHR-Daten (eigentlich CanFD-Daten) umgewandelt werden, die vom autonomen Fahrcontroller verarbeitet werden können.
Für die nächste Generation autonomer Fahrsysteme sind wir bestrebt, hochpräzise Karteninformationen zur Gesamtverarbeitung in den Domänencontroller für autonomes Fahren zu integrieren. Dieser Prozess bedeutet, dass unser Domänencontroller für autonomes Fahren eine Verbindung zur Kartenbox herstellen muss. Bei allen Datenanalysearbeiten müssen wir uns auf die folgenden Punkte konzentrieren:
1) Kann der KI-Chip des Domänencontrollers für autonomes Fahren alle Sensordaten verarbeiten, die für hochpräzise Karten erforderlich sind?
2) Verfügt die logische Operationseinheit der hochpräzisen Positionierungskarte über genügend Rechenleistung, um eine Sensordaten-Informationsfusion durchzuführen?
3) Erfüllt das gesamte zugrunde liegende Betriebssystem die Anforderungen an die funktionale Sicherheit?
4) Welche Verbindungsmethode wird zwischen dem AI-Chip und dem Logikchip verwendet, um die Zuverlässigkeit der Datenübertragung zu gewährleisten, Ethernet oder CanFD?
Um die oben genannten Fragen zu beantworten, müssen wir die Art und Weise analysieren, wie der Controller hochpräzise Kartendaten verarbeitet, wie in der folgenden Abbildung dargestellt.
ist der KI-Chip des autonomen Fahrsystems. In der zukünftigen hochpräzisen Kartendatenverarbeitung ist er hauptsächlich für die grundlegende Verarbeitung von Sensordaten verantwortlich, einschließlich Kameradaten, Lidar-Daten und Millimeterwellen Daten usw. Zu den angewandten Verarbeitungsmethoden gehören neben der Fusion und dem Clustering grundlegender Datenpunktwolken auch häufig verwendete Deep-Learning-Algorithmen, und ARM-Kerne werden im Allgemeinen für die zentrale Rechenverarbeitung verwendet.
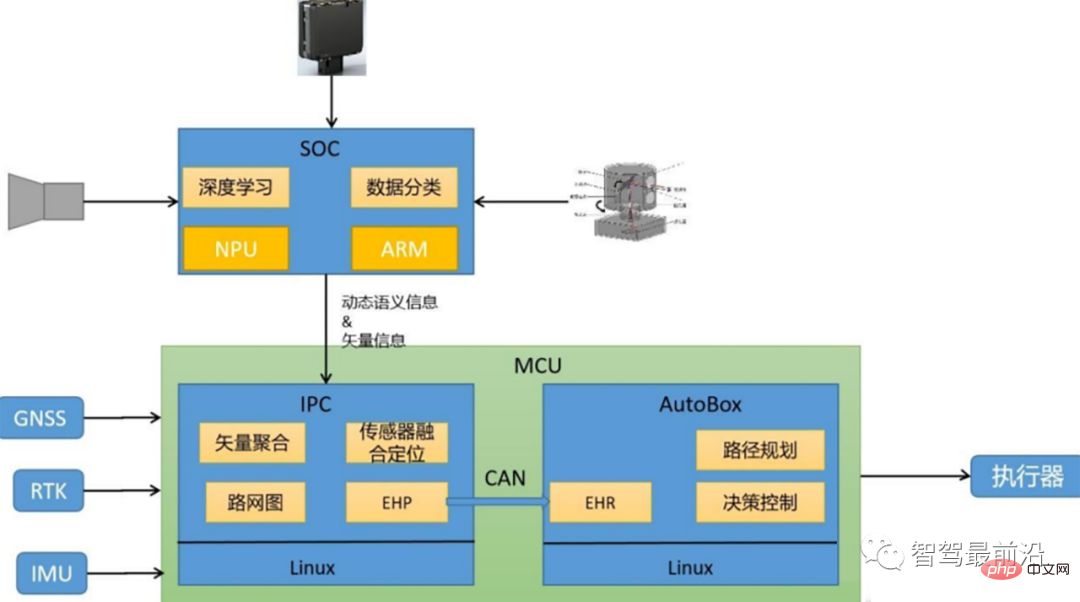 Als logische Operationseinheit des Domänencontrollers für autonomes Fahren führt die MCU anschließend alle Logikberechnungen durch, die für die ursprüngliche hochpräzise Kartenbox erforderlich sind. Einschließlich Front-End-Vektoraggregation, Sensorfusionspositionierung, Erstellung von Straßennetzkarten und vor allem Ersetzung der ursprünglichen Kartenboxfunktion zur Umwandlung von EHP-Informationen in EHR-Signale (wie die Zentraleinheit MCU EHP-Informationen effektiv in EHR-Informationen umwandeln kann). Einzelheiten dazu finden Sie in einem späteren Artikel) und führen Sie eine effektive Signalübertragung über Can-Leitungen durch. Schließlich wird AutoBox, eine logische Operationseinheit, für die Pfadplanung, Entscheidungssteuerung und andere Operationen verwendet.
Als logische Operationseinheit des Domänencontrollers für autonomes Fahren führt die MCU anschließend alle Logikberechnungen durch, die für die ursprüngliche hochpräzise Kartenbox erforderlich sind. Einschließlich Front-End-Vektoraggregation, Sensorfusionspositionierung, Erstellung von Straßennetzkarten und vor allem Ersetzung der ursprünglichen Kartenboxfunktion zur Umwandlung von EHP-Informationen in EHR-Signale (wie die Zentraleinheit MCU EHP-Informationen effektiv in EHR-Informationen umwandeln kann). Einzelheiten dazu finden Sie in einem späteren Artikel) und führen Sie eine effektive Signalübertragung über Can-Leitungen durch. Schließlich wird AutoBox, eine logische Operationseinheit, für die Pfadplanung, Entscheidungssteuerung und andere Operationen verwendet.
05 Zusammenfassung
Zukünftiges autonomes Fahren wird dazu neigen, alle von hochpräzisen Karten verarbeiteten Dateninformationen aus der Originalkarte zu konvertieren Die Box ist in den Domänencontroller für autonomes Fahren integriert, um eine echte zentrale Verarbeitungsintegration mit dem gesamten Fahrzeugdomänencontroller als integrierter Einheit zu schaffen. Diese Methode kann nicht nur mehr Rechenressourcen einsparen, sondern ermöglicht auch eine bessere Anwendung des KI-Datenverarbeitungsalgorithmus für eine hochpräzise Positionierung, wodurch die Konsistenz des Verständnisses der beiden über die Umgebung sichergestellt wird. Wir müssen der wichtigen Richtung der hochpräzisen Sensordatenintegration in Zukunft mehr Aufmerksamkeit schenken und mehr Aufwand in die Chip-Rechenleistung, das Schnittstellendesign, das Bandbreitendesign und das Design der funktionalen Sicherheit stecken.
Das obige ist der detaillierte Inhalt vonÜberblick über die wichtigsten technischen Elemente bei der Entwicklung des intelligenten Fahrens. Für weitere Informationen folgen Sie bitte anderen verwandten Artikeln auf der PHP chinesischen Website!
In Verbindung stehende Artikel
Mehr sehen- Technologietrends, die Sie im Jahr 2023 im Auge behalten sollten
- Wie künstliche Intelligenz Rechenzentrumsteams neue Alltagsaufgaben beschert
- Können künstliche Intelligenz oder Automatisierung das Problem der geringen Energieeffizienz in Gebäuden lösen?
- OpenAI-Mitbegründer im Interview mit Huang Renxun: Die Argumentationsfähigkeiten von GPT-4 haben noch nicht die Erwartungen erfüllt
- Dank der OpenAI-Technologie übertrifft Bing von Microsoft Google im Suchverkehr