
Heim >Technologie-Peripheriegeräte >KI >Bestandsaufnahme von 20 Schlüsselindikatoren für die Auswahl von KI-Chips für autonomes Fahren
Bestandsaufnahme von 20 Schlüsselindikatoren für die Auswahl von KI-Chips für autonomes Fahren

- WBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBnach vorne
- 2023-04-26 11:43:071035Durchsuche
Als Kernkomponente des autonomen Fahrens und „Gehirn“ des autonomen Fahrens muss die zentrale Steuerung normalerweise mit mehreren externen Kameras, Millimeterwellenradar, Lidar und IMU verbunden werden andere zu vervollständigende Geräte Zu seinen Funktionen gehören Bilderkennung, Datenverarbeitung usw.
Als intelligente Hardware muss der Domänencontroller umfangreiche Berechnungen wie Umgebungswahrnehmung und Deep Learning durchführen, um komplexe KI-Berechnungen durchzuführen und Intelligente Steuerungschips, die den Leistungsbedarf erfüllen, CPUs, die für die Steuerungsentscheidung und logische Operationen verantwortlich sind, und MCUs, die für die funktionale Sicherheit und Fahrzeugsteuerung verantwortlich sind, umfassen Betriebssysteme, Middleware und KI-Algorithmen auf Anwendungsebene.
Der dreiteilige Chip auf Hardwareebene wird auch als drei wichtige Chips bezeichnet:
Der erste Ein Teil davon ist in der Regel die GPU oder TPU, die umfangreiche Gleitkomma-Parallel-Computing-Anforderungen übernimmt und hauptsächlich für die Umgebungswahrnehmung und Informationsfusion verwendet wird, einschließlich der Identifizierung, Fusion und Klassifizierung von Sensorinformationen wie Kameras und Lidar, wie z. B. Xaviers GPU Einheit und Ascend 310.
Der zweite Teil ist hauptsächlich eine ARM-Architektur, ähnlich der CPU, die hauptsächlich für logische Operationen und Entscheidungssteuerung sowie für die Verarbeitung hochpräziser serieller Gleitkommaberechnungen verantwortlich ist.
Der dritte Teil ist hauptsächlich für die Zuverlässigkeit und Fahrzeugsteuerung verantwortlich, also für die funktionale Sicherheit und redundante Überwachung. Es erfordert keine hohe Rechenleistung, aber die Zuverlässigkeit muss gewährleistet sein. Die ISO26262-Level-Anforderung erreicht ASIL-D. Derzeit werden TC297 oder TC397 von Infineon häufiger verwendet.
KI-Algorithmen auf Softwareebene werden im Allgemeinen von Automobilherstellern oder OEMs selbst entwickelt, was die Fahrzeugleistung und -unterschiede widerspiegelt und im Allgemeinen von der Domäne gesteuert wird, die von Serverentwicklern bereitgestellt wird Ähnlich wie ROS enthält es hauptsächlich einige Schnittstellentreiber und eine optimierte Bereitstellung des Betriebssystems.
In Bezug auf das Betriebssystem verwendet Huawei das selbst entwickelte Hongmeng-System, und die MDC-Plattform ist mit Adaptive AUTOSAR kompatibel; QNX ist derzeit die beste und einzige Wahl für Autoqualität, aber es ist mit hohen Kosten konfrontiert; Linux und Autoware haben die meisten Benutzer aufgrund von Open Source gewonnen, insbesondere Linux. Mit seiner starken technischen Basis und seinem Ökosystem, gepaart mit der langjährigen Anwendungsbasis von ROS, sind es Betriebssysteme, die auf dem Linux-Kernel basieren derzeit sehr beliebt.

Über die Auswahl des KI-Chips für autonomes Fahren#🎜🎜 #
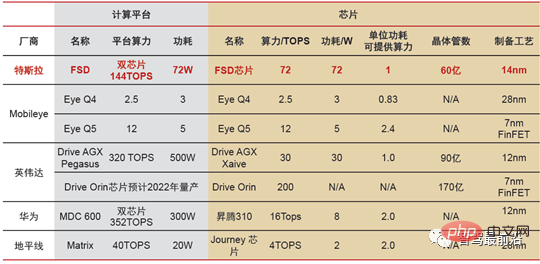
Derzeit gibt es auf dem Markt nicht viele KI-Chips zur Auswahl, insbesondere solche, die die Massenproduktion erreicht haben. Die einzigen sind Tesla, NVIDIA und Mobileye. Mit Ausnahme der selbst entwickelten und selbst genutzten Produkte von Tesla können derzeit andere Marken durch kooperative Entwicklung Testmuster erhalten.
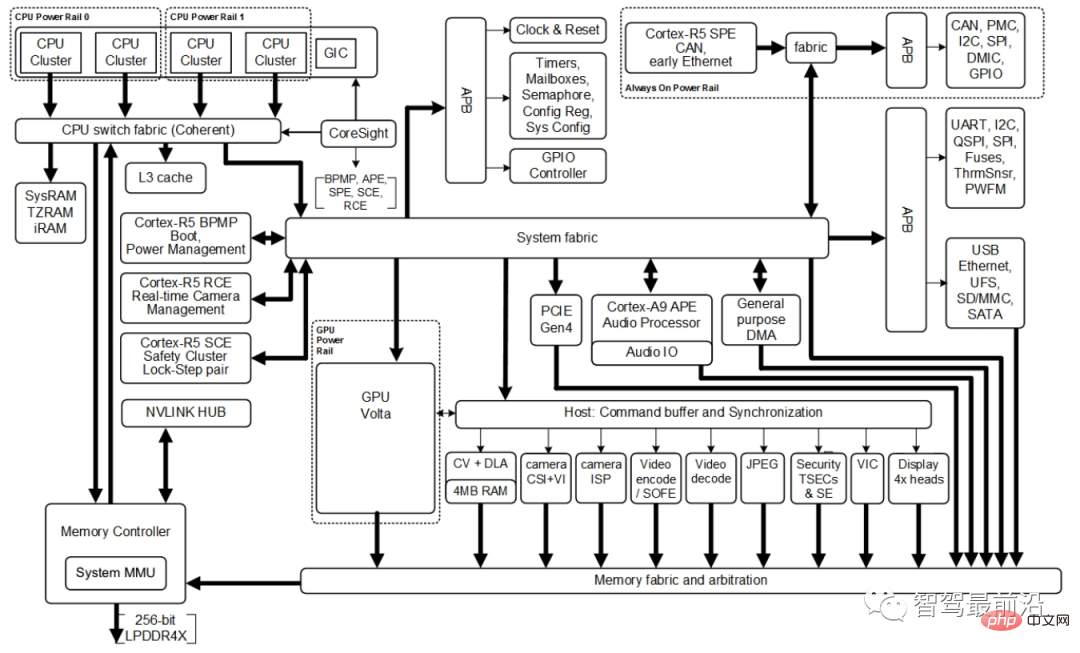
Nehmen wir NVIDIA Xavier relativ gesehen als Beispiel, da NVIDIA Xavier früher auf den Markt kam und sein ökologisches Layout relativ ist Complete ermöglicht Entwicklern den schnellen Aufbau von Systemen und die Entwicklung von KI-Anwendungen. Daher gibt es viele Unternehmen, die Domänencontroller auf Basis von Xavier-Modulen entwerfen.
Sechs verschiedene Prozessoren, darunter sechs verschiedene Prozessoren, ermöglichen es ihm, Dutzende von Algorithmen gleichzeitig und in Echtzeit für die Sensordatenverarbeitung, Umgebungswahrnehmung, Positionierung und Kartierung usw. zu verarbeiten Wegplanung.
Die interne Struktur des Chips ist unten dargestellt:

#🎜🎜 # 1)Kern: Der Kern ist normalerweise das Zentrum des Raumes. Es erleichtert einerseits die Kommunikation zwischen der automatischen Fahrsteuerung und peripheren Sensoren und Aktoren und nutzt gleichzeitig die Peripherie auch zu deren Schutz. Core betont den Betriebszustand. Core-Down bezieht sich normalerweise auf ein Problem bei der CPU-Berechnung. Core betont die Kernfunktion der gesamten externen Funktion des automatischen Fahrreglers. 2) DMIPS: Wird hauptsächlich zur Messung der Ganzzahl-Rechenfähigkeiten verwendet. Es umfasst die Anzahl der Befehlssätze, die pro Sekunde ausgeführt werden können, und die Anzahl der Aufgaben, die diese Befehlssätze pro Sekunde bei der Implementierung meines Testprogramms ausführen können. Diese Fähigkeit wird durch die CPU-Architektur, die Speicherzugriffsgeschwindigkeit und andere Hardwareeigenschaften bestimmt. Entscheiden. Dabei handelt es sich um eine Einheit, die die relative Leistung der CPU beim Ausführen des entsprechenden Testprogramms misst (in vielen Situationen zur Chipbewertung im autonomen Fahren ist man daran gewöhnt, MIPS als Einheit dieses Leistungsindikators zu verwenden). 3) Speicher: Zu den Hauptfunktionen der Speicherverwaltungseinheit gehören: Zuordnung virtueller Adressen zu physischen Adressen, Speicherzugriffskontrolle, Cache-Unterstützung usw.; 4) DataFlash: DataFlash ist ein Produkt mit großer Kapazität Von der amerikanischen Firma ATMEL eingeführte serielle Flash-Speicherprodukte, die mit der Nor-Technologie hergestellt werden, können zum Speichern von Daten und Programmcode verwendet werden. Im Vergleich zum parallelen Flash-Speicher benötigt er weniger Pins, ist klein, leicht zu erweitern, einfach an einen Mikrocontroller oder Controller anzuschließen und zuverlässig im Betrieb. Daher werden serielle Flash-Controller ähnlich wie DataFlash zunehmend in automatischen Fahrsteuerungen verwendet. Produkte sowie Mess- und Steuerungssysteme werden derzeit evaluiert. 5)ISP: Als Kern des visuellen Verarbeitungschips gehören zu den Hauptfunktionen von ISP AE (automatische Belichtung), AF (automatischer Fokus), AWB (automatischer Weißabgleich), Bildrauschenentfernung und LSC (Lens Shading). Korrektur), BPC (Bad PixelCorrection) und speichern Sie schließlich die Rohdaten und übergeben Sie sie an Videocodec oder CV usw. Durch ISP können bessere Bildeffekte erzielt werden, daher sind die Anforderungen an ISP in selbstfahrenden Autos sehr hoch. Beispielsweise beginnt die Integration von Zweikanal- oder sogar Dreikanal-ISPs. Im Allgemeinen ist der ISP in den AP integriert (für viele AP-Chiphersteller ist dies ein wichtiger Bestandteil des differenzierten Wettbewerbs), aber wenn sich die Anforderungen ändern, treten auch unabhängige ISPs auf. Der Hauptgrund ist, dass er flexibler konfiguriert werden kann Gleichzeitig gleicht es die Mängel der ISP-Funktion im AP-Chip aus und kooperiert mit ihnen. 6) Rechenleistung: Die Verwirklichung des autonomen Fahrens erfordert den Einsatz von Umgebungssensoren, um Informationen über die Straßenumgebung zu sammeln und die gesammelten Daten an den Zentralprozessor des Fahrzeugs zu übertragen, wo diese verarbeitet werden, um Hindernisse, mögliche Straßen usw. zu identifizieren. Basierend auf den Erkennungsergebnissen planen Sie den Weg, stellen die Fahrzeuggeschwindigkeit ein und steuern automatisch die Fahrt des Fahrzeugs. Der gesamte Prozess muss in einem Augenblick abgeschlossen sein und die Verzögerung muss auf die Millisekunden- oder sogar Mikrosekundenebene kontrolliert werden, um die Sicherheit des autonomen Fahrens zu gewährleisten. Um die Effekte der sofortigen Verarbeitung, Rückmeldung, Entscheidungsfindung, Planung und Ausführung zu erreichen, sind die Anforderungen an die Rechenleistung des Zentralprozessors sehr hoch. Beim autonomen Fahren verbraucht die visuelle Verarbeitung die meiste Rechenleistung und macht mehr als die Hälfte des gesamten Rechenleistungsbedarfs aus. Und mit jeder höheren Stufe des autonomen Fahrens steigt der Bedarf an Rechenleistung mindestens um das Zehnfache. Die L2-Ebene erfordert 2 TOPS Rechenleistung, L3 erfordert 24 TOPS Rechenleistung, L4 beträgt 320TOPS und L5 beträgt 4000+TOPS. Angesichts der Komplexität von Automobilanwendungen müssen Automobilprozessoren auch die Rechenleistungsnutzung berücksichtigen, ob sie Fahrzeugvorschriften und Sicherheitsstandards usw. erfüllt. Der theoretische Wert der Rechenleistung hängt von der Rechengenauigkeit, der Anzahl der MACs und der Betriebsfrequenz ab. Die theoretische Rechenleistung wird basierend auf der Akkumulation von Multiplikationsoperationen der Nettofaltungsschicht berechnet. Jede Multiplikationsakkumulation (MAC) in der Faltungsschicht wird als zwei OPS gezählt, und die Faltungsoperation macht mehr als 90 % aus. Andere Hilfsoperationen oder Operationen in anderen Schichten werden ignoriert. Die Gesamtzahl der Multiplikationsoperationen in allen Faltungsschichten von SSD beträgt 40G MACs, sodass die theoretische Rechenleistung 80GOPS beträgt. Unter ihnen Der tatsächliche Wert und der theoretische Wert sind sehr unterschiedlich, die tatsächliche Auslastung der Hardware ist höher. Die wichtigsten Faktoren, die den wahren Wert der Rechenleistung bestimmen, sind die Speicherbandbreite (SRAM und DRAM), die tatsächliche Betriebsfrequenz (d. h. Versorgungsspannung oder Temperatur) und die Stapelgröße des Algorithmus. 7) Stromverbrauch: Wenn im Modus „Höchste Leistung“ der Chip-Stromverbrauch des Controllers für autonomes Fahren hoch ist, auch wenn seine eigene Leistung stark ist, führt dies zu unvorhersehbaren versteckten Gefahren, wie z. B. einem doppelten Anstieg der Hitze Generation steigt der Stromverbrauch exponentiell an. Diese Ergebnisse sind zweifellos eine „Atombombe“, insbesondere für neue Energiemodelle. Daher müssen wir seine Stromverbrauchsindikatoren bei der frühen Entwicklung autonomer Fahrchips vollständig berücksichtigen. 8) 3D-GPU: Die GPU ist auf großen Durchsatz ausgelegt und wird für die Abwicklung umfangreicher paralleler Berechnungen verwendet. Die GPU-Steuereinheit kann mehrere Zugriffe zu weniger Zugriffen zusammenfassen. GPUs verwenden mehr Transistoren für Ausführungseinheiten anstelle komplexer Datencaches und Befehlssteuerung wie CPUs. Da GPUs über Super-Gleitkomma-Rechenfähigkeiten verfügen, können sie im Bereich der Bild- oder Videoverarbeitung von Smart-Car-Frontends eingesetzt werden. Sie werden auch zunehmend im Mainstream-Design von Hochleistungsrechnen für zentrale Controller eingesetzt. 9) Umfangreiche IO-Schnittstellenressourcen Der Hauptsteuerungsprozessor des autonomen Fahrens erfordert umfangreiche Schnittstellen zum Anschluss verschiedener Sensorgeräte. Zu den gängigen autonomen Fahrsensoren in der Branche gehören derzeit hauptsächlich: Kameras, Lidar, Millimeterwellenradar, Ultraschallradar, integrierte Navigation, IMU und V2X-Module. Zusätzlich zu der von den oben genannten Sensoren benötigten IO-Schnittstelle sind auch andere gängige Hochgeschwindigkeitsschnittstellen und Niedriggeschwindigkeitsschnittstellen erforderlich, wie zum Beispiel: PCIe, USB, I2C, SPI, RS232 usw . 10) PCIe: Als lokaler Bus der CPU ist sein größtes Merkmal ein hoher Datenübertragungsdurchsatz und eine geringe Latenz. 11)Sicherheitsziel: Das funktionale Sicherheitsziel ist die zentrale Designanforderung der gesamten zentralen Steuerung für autonomes Fahren. Da es sich auf die Ergebnisse der Einzelpunktfehleranalyse im gesamten Design der autonomen Fahrfunktion auswirkt, muss es vollständig implementiert werden Überlegen Sie im Frühstadium des Hardware-Designs, ob es die funktionalen Sicherheitsdesignanforderungen des Systems für Hardware vollständig erfüllen kann. 12) OTA: Remote-Upgrade repariert Softwarefehler für Benutzer, wodurch die Zeit für Zwischenschritte erheblich verkürzt wird, sodass die Software die Benutzer schnell erreichen kann, und gleichzeitig können dem Fahrzeug neue Funktionen hinzugefügt und der Umfang erweitert werden von „Service“ und „Betrieb“. Daher ist es unerlässlich, ob der zentrale Controller-Chip OTA unterstützt, um die Kosten für Automobilhersteller und -benutzer zu senken, einschließlich der Rückrufkosten der Automobilhersteller, der Zeitkosten der Benutzer, der Erhöhung der Aktualität der Benutzer und der Steigerung des Mehrwerts von Fahrzeugen. 13) Pakettyp: Die Größe des Controller-Pakets, die Pin-Definition usw. wirken sich auf die Installationsform des gesamten Fahrcontrollers und auch auf die Verteilung der Verbindungen zu Peripheriekomponenten aus. Ist die Schnittstelle außerdem wasserdicht? Wenn sie wasserdicht ist, kann die Installationsumgebung des Controllers relativ frei sein. Allerdings sind die aktuellen Domänenkontrollschnittstellen nicht wasserdicht. 14) Temperatur/Spannung: Der Temperaturkontrollbereich des Controllers umfasst seine Umgebungstemperatur bei Lagerung und Verwendung sowie die Tatsache, dass die Umgebungstemperatur bei Lagerung und Verwendung im Layoutbereich der Millimeterwellen-Controller-Baugruppe vor der Bestätigung des tatsächlichen Fahrzeugs höher ist als Dieser Wert ist später erforderlich. Auf dieser Grundlage sollte ein gewisses Maß an Berichtigung und Aufwärtsanpassung durchgeführt werden, um die OEM-Anforderungen zu erfüllen, und der Lieferant muss sicherstellen, dass es aufgrund von Hardware-Designfehlern nicht zu Rückrufen kommt. Insbesondere wenn die Rechenleistung mehr als 100 erreicht und der Stromverbrauch 60 W übersteigt, wird der Temperaturanstieg höchstwahrscheinlich eine aktive Kühlung erfordern, um sicherzustellen, dass die Wärme rechtzeitig abgeführt werden kann, ohne den normalen Betrieb des Controllers zu beeinträchtigen. Aktive Kühlung umfasst im Allgemeinen: Lüfterkühlung und Wasserkühlung. 15) Kfz-Vorschriften und funktionale Sicherheit: Im Vergleich zu Produkten der Unterhaltungselektronik stellen Automobilchips die höchsten Anforderungen an Sicherheit und Zuverlässigkeit. Automobilchips arbeiten seit vielen Jahren in der rauen Umgebung von „-40℃ bis 125℃“ hohen und niedrigen Temperaturen und starken Vibrationen, um sicherzustellen, dass Automobilelektronikprodukte die hohen Qualitätsanforderungen an Betriebstemperatur und Zuverlässigkeit erfüllen und Produktlebensdauer, International Automotive Electronics Der Automotive Electronics Council (AEC) hat relevante Qualitätszertifizierungsstandards festgelegt, darunter AEC-Q100, ein Zertifizierungsstandard für Stresstests für integrierte Schaltkreise in der Automobilindustrie. Nach Jahren der Entwicklung hat sich der AEC-Q100-Standard im Hinblick auf Zuverlässigkeit und Produktlebensdauer zum De-facto-Industriestandard für Automobilelektronikprodukte entwickelt. Zusätzlich zur Erfüllung der fahrzeugrechtlichen Anforderungen müssen autonome Fahrchips auch die Zertifizierungsanforderungen für „Funktionssicherheit (Fusa)“ erfüllen, die in der Norm ISO 26262 definiert sind. Die Designanforderung der funktionalen Sicherheit an Chips besteht darin, Chipfehler so weit wie möglich zu finden und zu beheben (unterteilt in: Systemfehler und zufällige Fehler). Ein Systemfehler ist im Wesentlichen ein Fehler im Produktdesign und hängt daher hauptsächlich von den Prozessspezifikationen des Designs und der Implementierung ab, während ein zufälliger Fehler eher vom speziellen Fehlererkennungsmechanismus im Chipdesign abhängt. ISO 26262 unterteilt Sicherheitsstufen, die gebräuchlichsten sind ASIL-B und ASIL-D. ASIL-B erfordert, dass der Chip 90 % der Single-Point-Failure-Szenarien abdeckt, während ASIL-D 99 % erfordert. Je größer die Chipfläche und je mehr Transistoren, desto höher ist die entsprechende Ausfallrate. 16) Chipsystem: Zum Beispiel, ob der Controller die integrierte Steuerungsmethode von MCU+MPU unterstützt oder nur die Single-Chip-Steuerung unterstützt. 17) Sicherheit der Lieferkette: Die größere Marktnachfrage hat zu Engpässen in der Lieferkette und Produktionskapazität von Halbleitern geführt, darunter verschiedene „Naturkatastrophen“, die den normalen Produktionsrhythmus von Halbleitern stören, und es besteht ein Widerspruch zwischen Nachfrage und Produktionskapazität kurzfristig schwierig zu lösen. Da die globale Chip-Lieferkette so eng ist, stellt die Sicherheit der Lieferkette auch für Domänencontroller-Anbieter eine große Herausforderung dar. Wenn OEMs Domänencontrollerlieferanten auswählen, sind auch die Lieferfähigkeiten ihrer Partner-Chiphersteller wichtige Überlegungen. Im Jahr 2022 ist die Automobilindustrie immer noch von der Chipknappheit betroffen. Einige OEMs haben begonnen, über neue Ideen für die Halbleiterversorgung nachzudenken, und einige haben sogar Tier 1 umgangen und sich direkt an Chipdesign-Hersteller gewandt. Immer tiefergehende OEMs haben begonnen, sich am Forschungs- und Entwicklungsprozess des Chipdesigns zu beteiligen. Beispielsweise haben viele Automobilhersteller strategische Partnerschaften mit Herstellern von KI-Chips für autonomes Fahren wie Black Sesame und Horizon geschlossen. Darüber hinaus dringen sie direkt in die Halbleiter-Lieferkette ein und führen das Chip-Design in die Hauptmotorenfabrik ein. Dieses Modell wird als „OEM-Foundry-Direct“-Modell bezeichnet. Zu den repräsentativen Unternehmen gehören Tesla, BYD usw. 18) Marktpositionierung: Für welche Art von Hauptsteuerchip Sie sich entscheiden, müssen Sie zunächst die Marktpositionierung des Domänencontrollers prüfen: Welche Funktionen soll er implementieren und in welcher Preisklasse wird er für die Konfiguration eingesetzt. Wenn das Ziel darin besteht, assistiertes Fahren und ein L1-L2-Produkt herzustellen, und es sich dabei um große Mengen handelt, werden Sie bei der Auswahl der Chips sehr empfindlich auf die Kosten achten. Wählen Sie für solche Domänenkontrollprodukte einfach Chips der mittleren bis unteren Preisklasse. „Wenn das Ziel darin besteht, ein selbstfahrendes Auto in begrenzten L4-Szenarien zu entwickeln, sind Kunden möglicherweise eher geneigt, ein maßgeschneidertes Produkt zu entwickeln. Wenn wir uns beispielsweise als Robotaxi positionieren, planen wir dies zu übernehmen.“ Bei einem Betriebsmodell besteht der Zweck darin, den Algorithmus zunächst zu polieren. Sein Volumen wird nicht besonders groß sein, sodass er bei der Auswahl eines Chips relativ weniger kostenempfindlich ist, aber die Leistung muss gut genug und stabil genug sein.“ 19) Chip. Liu Wei, stellvertretender General Manager von Neusoft Reach, erwähnte: „Aus Sicht der Zusammenarbeit mit Chipunternehmen wird es davon abhängen, ob es sich um einen Mainstream-Chiphersteller handelt und ob er über eine kontinuierliche Produkt-Roadmap verfügt.“ . Einige Chiphersteller haben möglicherweise einen guten Chip entwickelt, der jedoch in Zukunft nicht aktualisiert wurde. Dann wird es große Probleme bei der Iteration und Aktualisierung nachfolgender Produkte geben, die auf diesem Chip basieren , Joyson Electronics Intelligent Driving. Li Maoqing, der für das Systemdesign verantwortliche, vertrat ebenfalls den gleichen Standpunkt: „Bei der Auswahl von Hardwarelösungen achten Sie beim Domänencontroller-Systemdesign nicht nur auf die funktionale Leistung des Chips selbst Sie müssen auch die Produkt-Roadmap des Chip-Unternehmens vollständig verstehen und wissen, ob es für familienbasierte Chip-Serien möglich ist, nachfolgende Chips auf der Hardware-Plattform PIN auf PIN aufzurüsten, wodurch die Hardware-Leistung verbessert und gleichzeitig die Entwicklungskosten gesenkt werden 20) Chip-Ökologie (Werkzeugkette): Ob die gesamte Software-Werkzeugkette des Chips oder die Entwicklung einiger Algorithmen die Kundenbedürfnisse erfüllen kann. Mit anderen Worten: Was ist die Ökologie des Chips? Ob es ein gutes Ökosystem gibt, das Kunden bei der Umsetzung praktischer Entwicklungen unterstützen kann, ist auch für OEMs oder Tier 1 eine wichtige Überlegung bei der Auswahl von Chips. NVIDIAs Chip-Ökosystem ist relativ führend in der Branche. Sein Ökosystem umfasst Entwickler, verfügbare Anwendungssoftware sowie umfangreiche Tools und Bibliotheken: #🎜 🎜## 🎜🎜#

kann zahlreiche Talente für Softwarealgorithmen für den Automobilbereich bereitstellen; Eine große Anzahl von Algorithmusmodellen und zugehöriger Anwendungssoftware wurde trainiert; 🎜#Die einheitliche Hardware- und zugrunde liegende Software-Schnittstellenarchitektur (CUDA-X) kann problemlos auf den Automobilbereich übertragen werden;# 🎜🎜#
Das obige ist der detaillierte Inhalt vonBestandsaufnahme von 20 Schlüsselindikatoren für die Auswahl von KI-Chips für autonomes Fahren. Für weitere Informationen folgen Sie bitte anderen verwandten Artikeln auf der PHP chinesischen Website!
In Verbindung stehende Artikel
Mehr sehen- Technologietrends, die Sie im Jahr 2023 im Auge behalten sollten
- Wie künstliche Intelligenz Rechenzentrumsteams neue Alltagsaufgaben beschert
- Können künstliche Intelligenz oder Automatisierung das Problem der geringen Energieeffizienz in Gebäuden lösen?
- OpenAI-Mitbegründer im Interview mit Huang Renxun: Die Argumentationsfähigkeiten von GPT-4 haben noch nicht die Erwartungen erfüllt
- Dank der OpenAI-Technologie übertrifft Bing von Microsoft Google im Suchverkehr