
Heim >Technologie-Peripheriegeräte >KI >Wie realisieren Automobilhersteller nach der Vorintegration der autonomen Fahrhardware einen Daten-Closed-Loop?
Wie realisieren Automobilhersteller nach der Vorintegration der autonomen Fahrhardware einen Daten-Closed-Loop?

- 王林nach vorne
- 2023-04-15 09:46:021463Durchsuche
Hardware-Pre-Embedding ist ein neues Modell, das von Automobilherstellern im Rahmen des Trends zum autonomen Fahren übernommen wird. Das heißt, durch die Vor-Embedding-Hardware im Auto können Benutzer nachfolgende Autos besser nutzen , indem sie einfach die Software kontinuierlich aktualisieren Erfahrung und verringert gleichzeitig den Druck auf OEMs, ihre Modelle auf den Markt zu bringen. Es besteht ein notwendiger Zusammenhang zwischen Hardware-Pre-Embedding und OTA-Remote-Upgrade. Nachdem wir über Hardware-Pre-Embedding gesprochen haben, werden wir über das Prinzip von OTA sprechen.
Lassen Sie uns vorher zunächst ein Thema besprechen, das weder durch Hardware-Pre-Embedding noch durch OTA gelöst werden kann – wie realisieren Automobilunternehmen einen Daten-Closed-Loop während der Forschung und Entwicklung?
Was Hardware-Pre-Embedding und OTA betrifft: Wenn Sie rausgehen und nach links abbiegen, können Sie den Inhalt sehen, der am Heck aussortiert wurde.
Zurück zum Geschäft, zurück zum Thema dieser Ausgabe: Nachdem die Hardware für autonomes Fahren vorab eingebettet ist, wie realisieren Automobilunternehmen einen Daten-Closed-Loop?

Nur 5 Schritte zur Erzielung von Daten geschlossene Schleife
Ni schlägt eine 5-stufige Methode zur Datenerfassung/-verarbeitung vor Test
- Big-Data-Management
- Szenariovirtualisierung
- Daten-Open-Loop-Feedback
- Daten-Closed-Loop
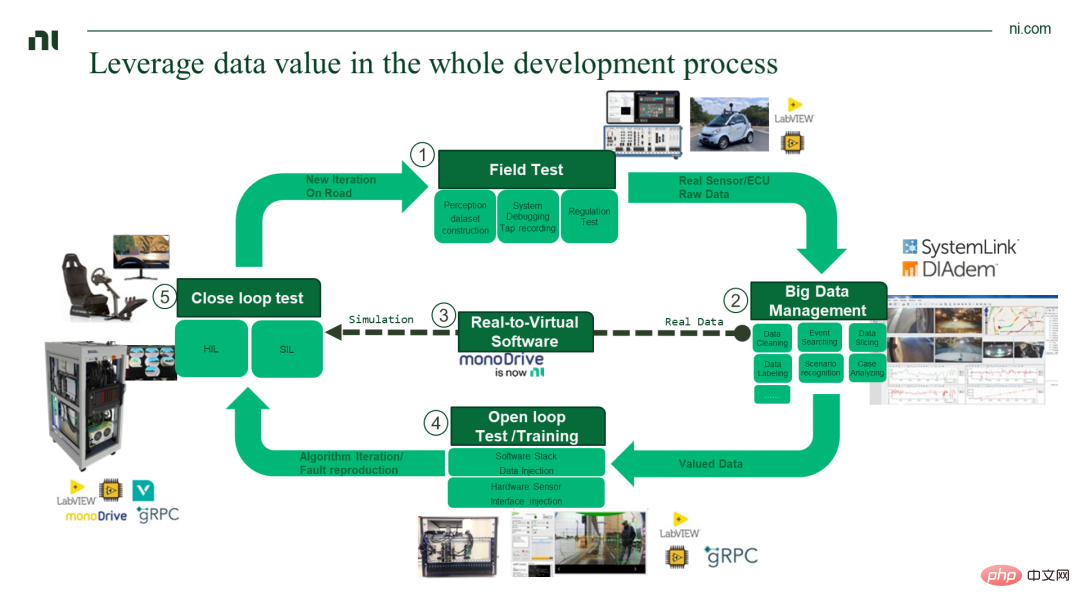 Von der Datenerfassung bis zum Daten-Closed-Loop, nur 5 Schritte
Von der Datenerfassung bis zum Daten-Closed-Loop, nur 5 Schritte
1. Straßentest – Data Record System AD
Der Straßentest ist eine wichtige Quelle für die Erfassung realer Szenendaten, unabhängig davon, ob es sich um die Kommunikation zwischen Fahrzeug und Straße handelt In automatischen Testsystemen müssen große Datenmengen verarbeitet werden. Im Allgemeinen sind Datenerfassungs-, Synchronisierungs- und Speichergeräte erforderlich.
Welche Arten von Sensoren brauchen selbstfahrende Autos?
Autonome Fahrzeuge sind autonome Fahrzeuge, die Erfassungs-, Entscheidungs- und Kontrollfunktionen integrieren. Unter anderem ersetzt das Erfassungssystem die Funktionen Sehen, Hören, Berühren usw. des menschlichen Fahrers und integriert den von Kameras erfassten massiven Verkehr. Radargeräte und andere Sensoren identifizieren verschiedene Verkehrselemente genau, um Entscheidungssysteme für autonome Fahrzeuge zu unterstützen.
1. KameraKameras werden je nach Videoerfassungsmethode in zwei Kategorien unterteilt: Digitalkameras und Analogkameras.
In Fahrzeugen werden im Allgemeinen Digitalkameras verwendet, die die von der Videoaufnahmeausrüstung erzeugten analogen Videosignale in digitale Signale umwandeln und diese dann im Computer speichern können.
Eine analoge Kamera kann das aufgenommene Videosignal nur über eine bestimmte Videoaufnahmekarte in einen digitalen Modus umwandeln und es dann komprimieren, bevor es zur Verwendung auf einem Computer umgewandelt wird.
Das von uns verwendete Festnetztelefon ist beispielsweise ein analoges Signal, das während des Anrufs anfällig für Rauschen (aktueller Ton oder Unhörbarkeit) ist. Um eine gute Anrufqualität aufrechtzuerhalten, digitalisieren unsere Mobiltelefone die analogen Signale des Telefons, sodass die Anrufqualität zwischen Mobiltelefonen sehr klar ist. Nach dem gleichen Prinzip kann die Verwendung einer Digitalkamera das Bildrauschen effektiv reduzieren und verbessern bildgebender Effekt.
In einem Satz: Analoge Videosignale können innerhalb eines bestimmten Zeitbereichs unendlich viele verschiedene Werte haben. Das digitale Videosignal entsteht durch Abtasten, Quantisieren und Kodieren auf Basis des analogen Signals. Analoge Signale sind anfällig für Signalrauschen und Interferenzen und wurden nach und nach durch digitale Signale ersetzt.
 Bildquelle: Offizielle Website von Bosch
Bildquelle: Offizielle Website von Bosch
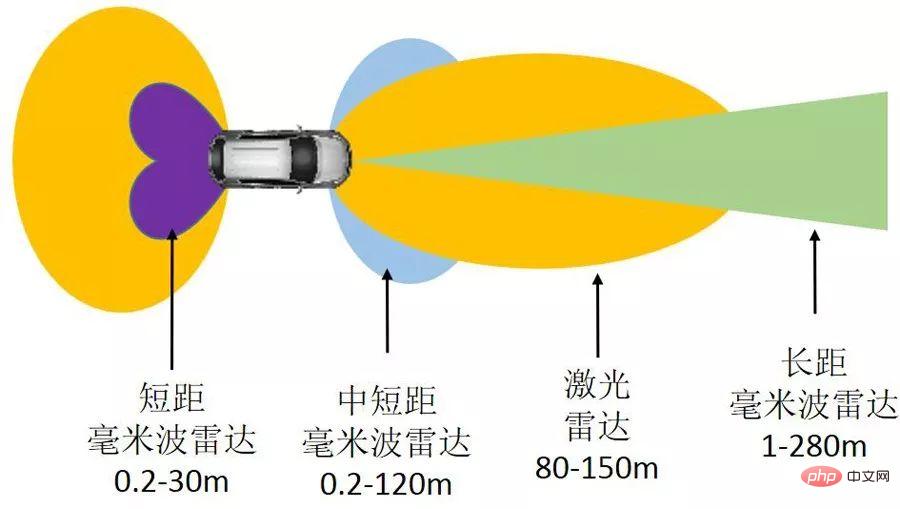
Radar kann die Umgebung aktiv erfassen und wird weniger von der äußeren Umgebung beeinflusst als visuelle Sensoren. Es ist einer der wichtigen Sensoren für autonome Fahrzeuge. Radar sendet elektromagnetische Wellen an das Ziel aus und empfängt das Echo, wodurch Daten wie Zielentfernung, Ausrichtung und Entfernungsänderungsrate ermittelt werden. Entsprechend dem elektromagnetischen Wellenband kann Radar in drei Kategorien unterteilt werden: Lidar, Millimeterwellenradar und Ultraschallradar. Die modulare Datenerfassungslösung basierend auf der von NI bereitgestellten PXI-Plattform kann die Datenerfassung mehrerer Kameras, Fahrzeug-Ethernet, CAN/CANFD, GPS usw. erfüllen und kann auch die Datenerfassungsanforderungen von erfüllen aufeinanderfolgende Etappen. Beispielsweise befindet sich der ADAS-Domänencontroller grundsätzlich in der Entwicklungs- und Iterationsphase. Sie können NI-Testgeräte als Middleware verwenden, um Daten über die Daten-Bypass-Erfassungsmethode zurückzuerhalten, sodass die Datenverbindung des Sensors nicht zerstört wird . Darüber hinaus unterstützt die Lösung von NI Datenspeicherkapazitäten von 15 TB bis 200 TB. Ein leistungsstarkes Datenerfassungssystem, das die Anforderungen verschiedener Sensoren, Steuergeräte und Kommunikationsdatenaufzeichnung erfüllt, muss speziell für den Dauerbetrieb ausgelegt sein und äußerst zuverlässige RAID-Speichergeräte bereitstellen, die Rohdaten von Kameras im Millimeterwellenbereich messen können Radar und Lidar umfassen beim Testen des Fusionscontrollers auch zusätzliche Referenzkamera-Videodaten sowie Daten des Trägheitsnavigationssystems, die die genaue Position des Fahrzeugs und Fahrzeug-Ethernet, CAN, CANFD, FlexRay und viele andere Busdaten liefern. 2. Big-Data-Management – DIAdem Bei der Übertragung von Daten vom Fahrzeug zum Rechenzentrum werden häufig Backhaul-Methoden wie die Datenmigration verwendet, und das Datenvolumen kann 10–100 TB/jedes Fahrzeug/Tag erreichen. Das Rechenzentrum wiederum kann das Fahrzeug auch in Echtzeit überwachen, was hauptsächlich über das 4G- oder 5G-Netzwerk des Fahrzeugs erfolgt. Für Fahrzeuge auf verschiedenen Ebenen ist auch die Menge der zu sammelnden Daten exponentiell gestiegen. Nehmen wir als Beispiel die derzeit übliche L3-Stufe mit der Einführung von 4K-Ultra-High-Definition-Kameras, 128-Zeilen-Lidar und anderen Sensoren. Die vom Datenerfassungssystem 8 Stunden am Tag aufgezeichnete Datenmenge beträgt bis zu 30 TB . Zusätzlich zu diesen cloudbasierten Tools gibt es hier ein weiteres Data-Mining-Artefakt – . Es kann in der Cloud bereitgestellt werden, um entsprechende Datenvisualisierung und Data Mining für Straßentestdaten, Datenbilder aus mehreren Quellen, Punktwolken und einige Busdaten zu implementieren. DIAdem kann über 200 Daten-Plug-Ins bereitstellen und ist mit verschiedenen Datenformaten von Testherstellern wie ASC, MDF4, TTL, MAT usw. kompatibel.
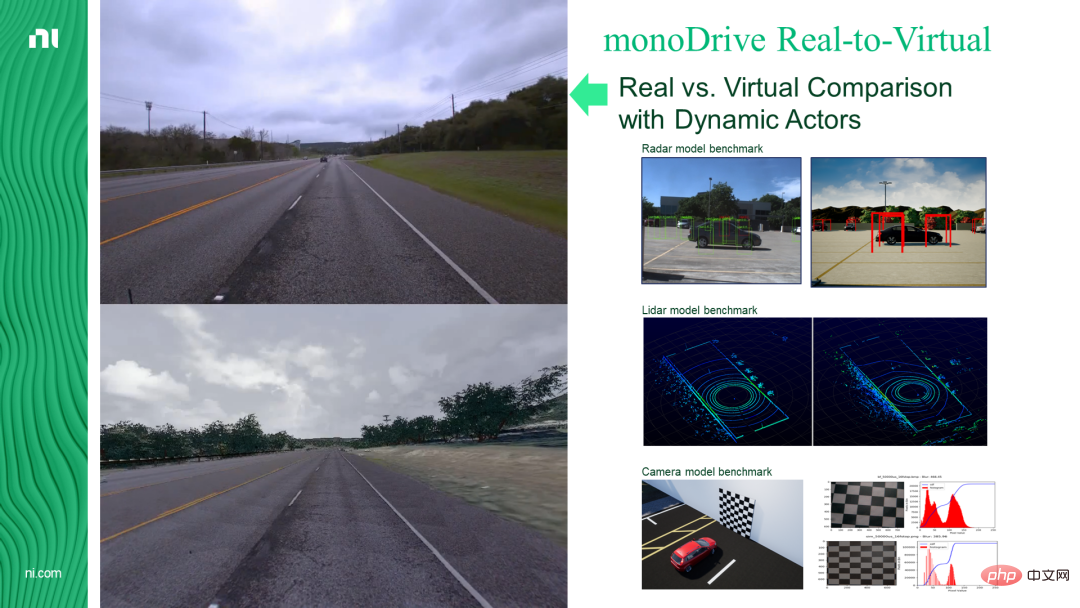
3. Szenenvirtualisierung – monoDrive Nach dem Sammeln von Daten durch Straßentests ist es notwendig, die Daten zu bereinigen und zu klassifizieren, Szenen auszuwählen und schließlich reale Straßentests und virtuelle Simulationstests zu kombinieren. monoDrive ist ein solches Tool, das eine hochauflösende sensorphysikalische Modellierung und semantische Szenensegmentierung erreichen kann. Es unterstützt auch Cloud-Simulationsfunktionen und kann eine große Anzahl von Testfällen in der Cloud bereitstellen, um den Simulationsfortschritt zu beschleunigen. Ein weiterer wichtiger Vorteil von monoDrive ist die erweiterte Funktionalität der automatischen Generierung realer virtueller Szenen. Es ist erwähnenswert, dass NI während des Prozesses der Szenenrekonstruktion oder Sensormodellierung reale Sensordaten und virtuelle Sensordaten entsprechend kennzeichnen kann. Ein Tool, das reale Fahrzeugdaten in Simulationsszenarien umwandelt und ein datengesteuertes F&E-Modell implementiert, das auf der Ansammlung großer Mengen realer Fahrzeugdaten basiert. ▲Sammeln von Szenentransformationseffekten Die Toolkette unterstützt die Anordnung und Kombination großer Mengen dynamischer und statischer Daten, wodurch das Problem gelöst wird Problem von Abweichung zwischen Falldesign und tatsächlicher Situation Große Probleme bringen die Simulation des autonomen Fahrens näher an die reale Welt. ▲ Semantische Szenenkonvertierungs-Toolkette Dieser Schritt zum Original Die Daten werden in die ADAS-Wahrnehmungssoftware zurückgespeist, und ein Teil davon wird direkt in den Software-Stack zurückgespeist, um eine Software-Rückkopplung durchzuführen, hauptsächlich für den Testteil einiger Modelle. Ein anderer Teil wird direkt an das reale Steuergerät zurückgekoppelt, das einige der Situationen, die wir während des Straßentests entdeckt haben, realistischer reproduzieren kann. Die Zusammensetzung der NI-Systemarchitektur: Benutzerrechenzentrum, Replay-PC auf Basis der Linux-Plattform, NI PXI-Plattform Um einen geschlossenen Datenkreislauf zu bilden und die Daten vollständig zu nutzen Wert von Rohdaten, immer mehr Immer mehr Automobilhersteller bauen ein solches Cluster-Daten-Feedback-System auf. Wenn viele Automobilhersteller die AEB-Funktion definieren, verlangen sie in der Regel, dass die AEB-Funktion bei 100.000 Kilometern oder 200.000 Kilometern nicht fälschlicherweise auslösen darf. Geben Sie mir ein Beispiel – Wenn Sie während des Straßentests 80.000 Kilometer laufen und plötzlich ein falscher Auslöser auftritt, müssen Sie zurückgehen und die entsprechende Software modifizieren. Muss ich nach der Änderung der Software noch weitere 100.000 Kilometer laufen? Offensichtlich würde es viel Zeit und Erfahrung verschwenden, alles noch einmal zu machen. Was sind angesichts einer solchen Herausforderung die effektivsten Methoden? Wang Shuai erklärte: „Wenn beim ersten Straßentest bei 80.000 Kilometern ein Problem auftritt, können wir sicherstellen, dass die vorherigen Kilometerdaten aufgezeichnet werden. Sobald das Problem entdeckt wurde, ändern wir die Software iterativ. Nach der Änderung der Software verwenden wir die gesammelten Originaldaten, um zu testen, ob die Software normal mit den Originaldaten ausgeführt werden kann. Dies reduziert unseren Bedarf an Straßentests und beschleunigt dadurch die Entwicklung. Schleifentests – SIL und HIL2. Radar
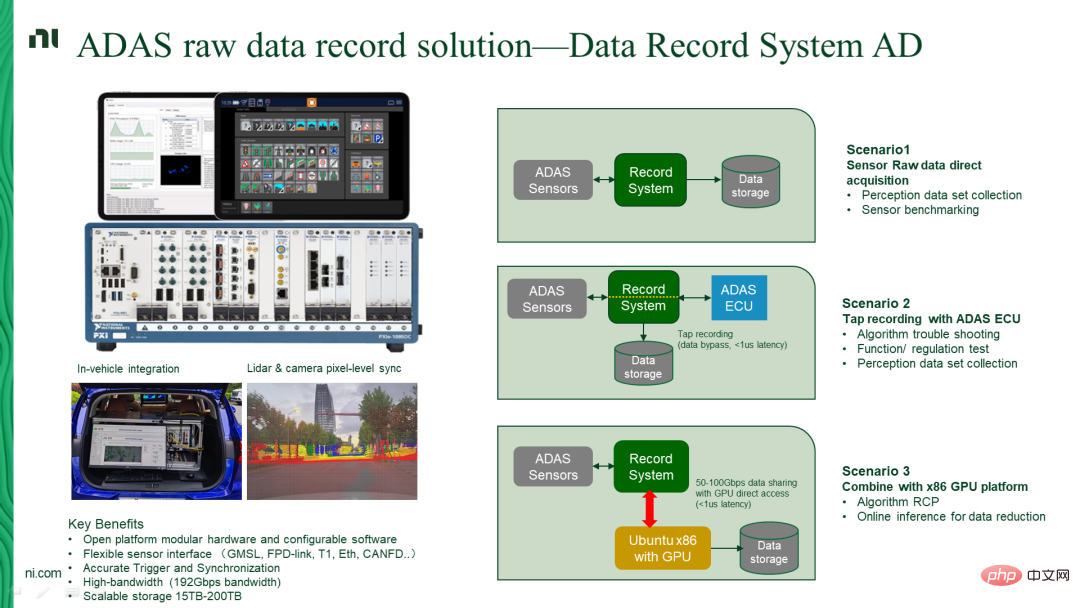
Das Erfassungssystem muss eine Datenspeicherung mit hoher Bandbreite und hoher Kapazität bieten und außerdem berücksichtigen, wie die Daten auf einfache Weise an das Rechenzentrum übertragen werden können. Beispielsweise werden Daten über eine dedizierte Daten-Upload-Maschine an ein Rechenzentrum mit einer Kapazität von PB übertragen.


4. Daten-Open-Loop-Feedback – Systemarchitektur basierend auf der PXI-Plattform
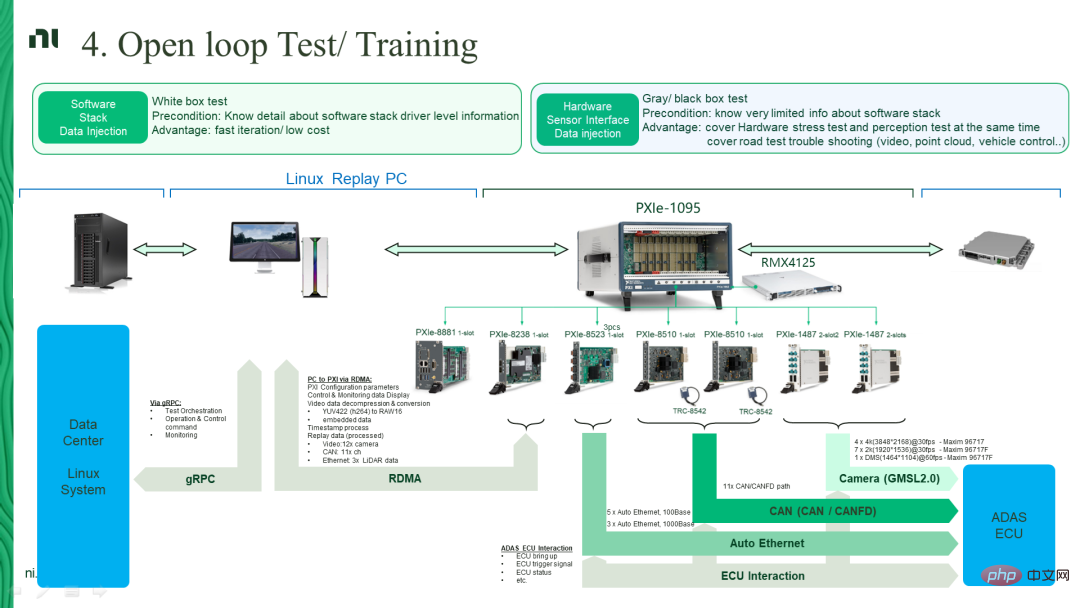
Closed-Loop-Tests umfassen normalerweise Software-in-the-Loop (SIL) und Hardware-in-the-Loop (HIL). Im Hinblick auf Software-in-the-Loop besteht die Lösung von NI darin, mithilfe der monoDrive-Plattform eine Umgebung bereitzustellen, die stapelweise in der Cloud bereitgestellt werden kann. Im Hinblick auf Hardware-in-the-Loop besteht die Lösung von NI darin, die PXI-Plattform und die Vorteile von NI bei Kameras, Fahrzeugbussen und Datensynchronisation zu nutzen, um Closed-Loop-Systeme mit Dateneinspeisungsfunktionen für mehrere Sensortypen zu implementieren.
Das obige ist der detaillierte Inhalt vonWie realisieren Automobilhersteller nach der Vorintegration der autonomen Fahrhardware einen Daten-Closed-Loop?. Für weitere Informationen folgen Sie bitte anderen verwandten Artikeln auf der PHP chinesischen Website!
In Verbindung stehende Artikel
Mehr sehen- Technologietrends, die Sie im Jahr 2023 im Auge behalten sollten
- Wie künstliche Intelligenz Rechenzentrumsteams neue Alltagsaufgaben beschert
- Können künstliche Intelligenz oder Automatisierung das Problem der geringen Energieeffizienz in Gebäuden lösen?
- OpenAI-Mitbegründer im Interview mit Huang Renxun: Die Argumentationsfähigkeiten von GPT-4 haben noch nicht die Erwartungen erfüllt
- Dank der OpenAI-Technologie übertrifft Bing von Microsoft Google im Suchverkehr