
Heim >Technologie-Peripheriegeräte >KI >Hinzufügen realen Agentenverhaltens zum autonomen Fahrsimulator CARLA
Hinzufügen realen Agentenverhaltens zum autonomen Fahrsimulator CARLA

- WBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBnach vorne
- 2023-04-08 14:11:082014Durchsuche
arXiv-Artikel „Einfügung realer Agentenverhaltensweisen in den autonomen Fahrsimulator CARLA“, 22. Juni, Spanien.
Die Rolle der Simulation beim autonomen Fahren wird aufgrund des Bedarfs an schnellem Prototyping und umfangreichen Tests immer wichtiger. Physikbasierte Simulation bietet zahlreiche Vorteile und Vorteile zu angemessenen Kosten und eliminiert gleichzeitig das Risiko für Prototyping, Fahrer und Gefährdete Verkehrsteilnehmer (VRU).
Es gibt jedoch zwei wesentliche Einschränkungen. Erstens bezieht sich die bekannte Realitätslücke auf den Unterschied zwischen Realität und Simulation, der verhindert, dass simulierte autonome Fahrerlebnisse eine effektive Leistung in der realen Welt erzielen. Zweitens mangelt es an empirischem Wissen über das Verhalten realer Akteure (Menschen), darunter Ersatzfahrer oder Beifahrer und andere Verkehrsteilnehmer wie Fahrzeuge, Fußgänger oder Radfahrer.
Agentensimulationen sind in der Regel vorprogrammiert, probabilistisch zufällig oder auf der Grundlage realer Daten generiert, stellen jedoch nicht das Verhalten realer Agenten dar, die mit bestimmten Simulationsszenarien interagieren. In diesem Artikel wird ein vorläufiger Rahmen vorgeschlagen, der eine Echtzeitinteraktion zwischen realen Agenten und simulierten Umgebungen, einschließlich autonomer Fahrzeuge, ermöglicht und synthetische Sequenzdaten von simulierten Sensoren über mehrere Ansichten hinweg generiert, um Vorhersagesysteme zu trainieren, die auf Verhaltensmodellen basieren.
Dieser Ansatz integriert immersive Virtual Reality (VR)- und Human Motion Capture (HMC)-Systeme mit CARLA für autonomes Fahren. Es beschreibt die Hardware- und Softwarearchitektur und diskutiert die sogenannte Verhaltenslücke.
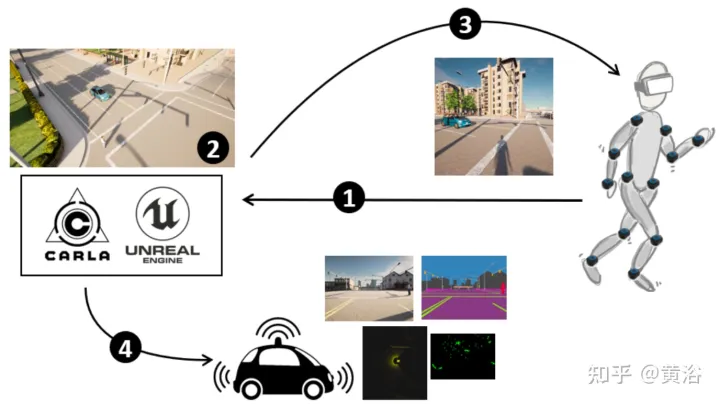
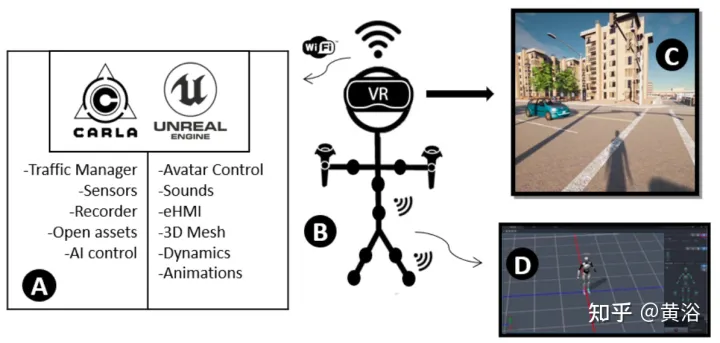
Die Abbildung zeigt einen Überblick über die Methode: (1) CARLA-UE ist mit Kopf- (VR-Headset) und Körperhaltungen (Motion-Capture-System) ausgestattet. (2) Generieren Sie Szenen mit autonomen Fahrzeugen und digitalen Fußgängern. (3) Bereitstellung einer Umgebung für Fußgänger (über VR-Headsets). (4) Automatische Fahrzeugsensoren erfassen die Umgebung, einschließlich Fußgänger.
Im Folgenden werden die Funktionen des immersiven VR-Systems im autonomen Fahrsimulator CARLA vorgestellt.
Erreichen Sie ein vollständiges Eintauchen in Fußgänger, indem Sie Verhaltens- und Interaktionsstudien durchführen und dabei die Funktionen von UE4 und externer Hardware wie VR-Brillen und einer Reihe von Bewegungssensoren nutzen.
Der CARLA-Open-Source-Simulator ist auf UE4 implementiert und bietet hochwertiges Rendering, realistische Physikumgebungen und ein Ökosystem interoperabler Plug-Ins. CARLA simuliert dynamische Verkehrsszenen und bietet eine Schnittstelle zwischen der von UE4 erstellten virtuellen Welt und dem in der Szene laufenden Straßenagenten. Um dies zu erreichen, ist CARLA als Server-Client-System konzipiert, wobei der Server die Simulation ausführt und die Szene rendert. Die Kommunikation zwischen Client und Server erfolgt über Sockets.
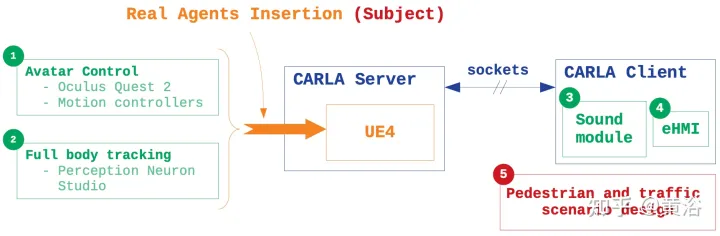
Die Hauptmerkmale des Einfügens realen Agentenverhaltens in die Simulation basieren auf fünf Punkten (wie in der Abbildung dargestellt): 1) Avatar-Steuerung: CARLA-Blueprint-Bibliothek, sammelt die Architektur aller Rollen und Attribute und ändert sie der Fußgänger-Entwurf, in Erstellen Sie eine immersive und bewegliche VR-Schnittstelle zwischen Menschen und der virtuellen Welt; 2) Körperverfolgung: Verwenden Sie eine Reihe von Trägheitssensoren und proprietärer externer Software, um die Bewegung und Bewegungswahrnehmung des Motivs durch reale Szenen zu erfassen und Avatare zu übertragen Bewegung durch .bvh-Dateien In den Simulator integriert; 3) Sounddesign: Da CARLA ein audioloser Simulator ist, werden Positionsgeräusche in die Umgebung eingebracht, um das Eintauchen zu verbessern; 4) eHMI-Integration: Ermöglicht die Kommunikation des autonomen Fahrzeugstatus und Absichtsinformationen, führen Sie interaktive Recherchen durch; 5) Szenensimulation: Entwerfen Sie Verkehrsszenen im CARLA-Client, um das Verhalten von Fahrzeugen und Fußgängern zu steuern.
Die Kommunikation zwischen Verkehrsteilnehmern ist ein wichtiger Faktor im Verkehrsumfeld. Im Experiment wurde eine externe Mensch-Maschine-Schnittstelle (eHMI) für das autonome Fahrzeug bereitgestellt, um seinen Status und seine Absichten den tatsächlichen Verkehrsteilnehmern mitzuteilen.
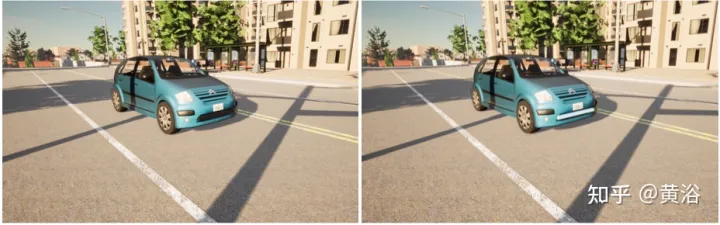
Wie in der Abbildung dargestellt, besteht das vorgeschlagene eHMI-Design aus einem Lichtstreifen entlang der Fahrzeugfront. Das Bild links ist ohne eHMI und das Bild rechts ist mit eHMI. Dies ermöglicht die Untersuchung der Auswirkung der Schnittstelle auf die Entscheidungsfindung, wenn Fußgänger-Trajektorien mit Fahrzeug-Trajektorien in virtuellen Szenen zusammenlaufen.
Die gesamte Systemarchitektur ist in der Abbildung dargestellt:
CARLA bietet verschiedene Möglichkeiten zur Simulation von Verkehr und spezifischen Verkehrsszenarien. Füllen Sie Simulationen mit realistischen städtischen Verkehrsbedingungen mit Verkehrsmanagementmodulen. Die Steuerung jedes Fahrzeugs wird in einem bestimmten Thread ausgeführt. Die Kommunikation mit anderen Schichten wird durch synchrones Messaging verwaltet.
Kontrollieren Sie den Verkehrsfluss, indem Sie Parameter festlegen, die ein bestimmtes Verhalten erzwingen. Beispielsweise kann es Autos erlaubt werden, zu schnell zu fahren, Ampelbedingungen zu ignorieren, Fußgänger zu ignorieren oder einen Spurwechsel zu erzwingen.
Der Hauptkörper ist in den Simulator integriert, einschließlich einer 3D-Modellkarte der Stadt. Jede Karte basiert auf einer OpenDRIVE-Datei, die einen vollständig kommentierten Straßenverlauf beschreibt. Mit dieser Funktion können Sie Ihre eigenen Karten entwerfen, dieselben Verkehrsszenarien in realen und virtuellen Umgebungen reproduzieren, die Integration des realen Verhaltens des Simulators bewerten und Feldstudien durch den Vergleich von Interaktionsergebnissen durchführen.
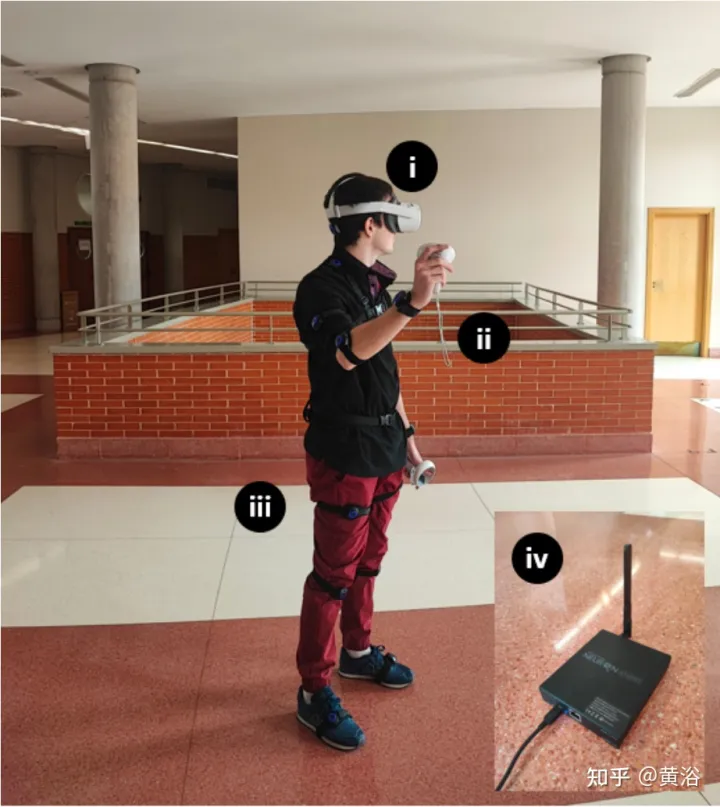
Das Hardware-Setup ist wie im Bild dargestellt: Während des Experiments wurde Oculus Quest 2 als Head-Mounted Device (HMD) verwendet, erstellt von Meta, 6 GB RAM-Prozessor, zwei einstellbaren 1832 x 1920-Objektiven, 90 Hz Bildwiederholfrequenz und 256 GB Speicher. Das Quest 2 verfügt über Wi-Fi 6, Bluetooth 5.1 und USB-Typ-C-Konnektivität, SteamVR-Unterstützung und 3D-Lautsprecher. Für die Ganzkörperverfolgung kombinieren Sie die Lösung mit PNS mit einem Trägheitstracker. Das Kit enthält ein eigenständiges VR-Headset, 2 Motion Controller, 17 Studio-Trägheitskörpersensoren, 14 Gurtsätze, einen Ladekoffer und einen Studio-Transceiver.
Da CARLA Build und Quest 2 nur auf Windows basieren, basiert das VR Immersion System derzeit auf den Betriebssystemen UE4.24 und Windows 10. Mit dem TCP-Sockets-Plugin werden die Position des Editors aller Teilnehmer und andere nützliche Parameter von der Python-API gesendet, wodurch die Stimme jedes Teilnehmers oder das eHMI eines autonomen Fahrzeugs integriert wird. „VR Preview“ startet das Spiel auf HMD. Perception Neuron Studio arbeitet mit Axis Studio, das bis zu drei Probanden gleichzeitig und 23 Körper- und Fingersensoren gleichzeitig unterstützt.
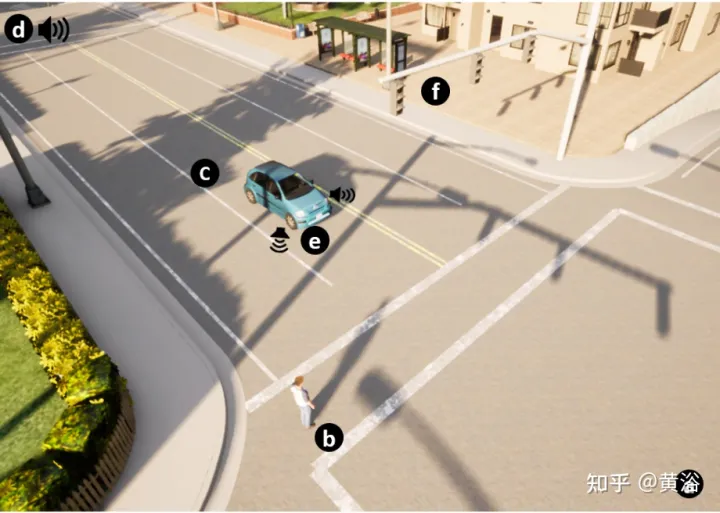
Das Bild zeigt die Simulation interaktiver Verkehrsbedingungen: (a) 3D-Weltdesign. (b) Passender Testamentsvollstrecker-Avatar für Fußgänger. (c) Selbstfahrende Autos. (d) Umgebungsgeräusche und intelligente Geräusche. (e) eHMI. (f) Ampeln und Verkehrszeichen.
Das obige ist der detaillierte Inhalt vonHinzufügen realen Agentenverhaltens zum autonomen Fahrsimulator CARLA. Für weitere Informationen folgen Sie bitte anderen verwandten Artikeln auf der PHP chinesischen Website!
In Verbindung stehende Artikel
Mehr sehen- Technologietrends, die Sie im Jahr 2023 im Auge behalten sollten
- Wie künstliche Intelligenz Rechenzentrumsteams neue Alltagsaufgaben beschert
- Können künstliche Intelligenz oder Automatisierung das Problem der geringen Energieeffizienz in Gebäuden lösen?
- OpenAI-Mitbegründer im Interview mit Huang Renxun: Die Argumentationsfähigkeiten von GPT-4 haben noch nicht die Erwartungen erfüllt
- Dank der OpenAI-Technologie übertrifft Bing von Microsoft Google im Suchverkehr